



















External Stowage Platforms 1-3
Quick Facts
Space shuttle Endeavour delivered the ESP-3, as well as the S5 truss spacer, and a control moment gyroscope on Aug. 10, 2007.

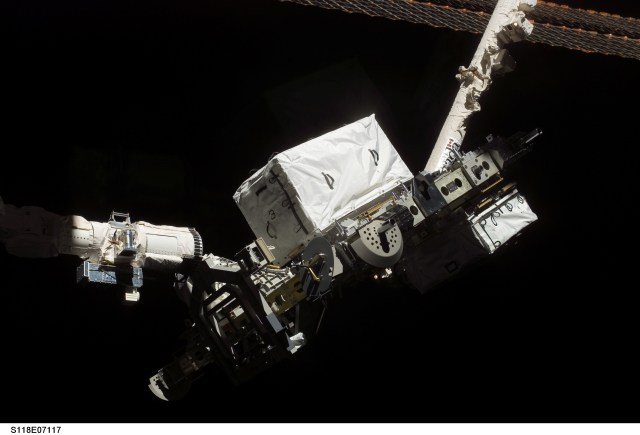
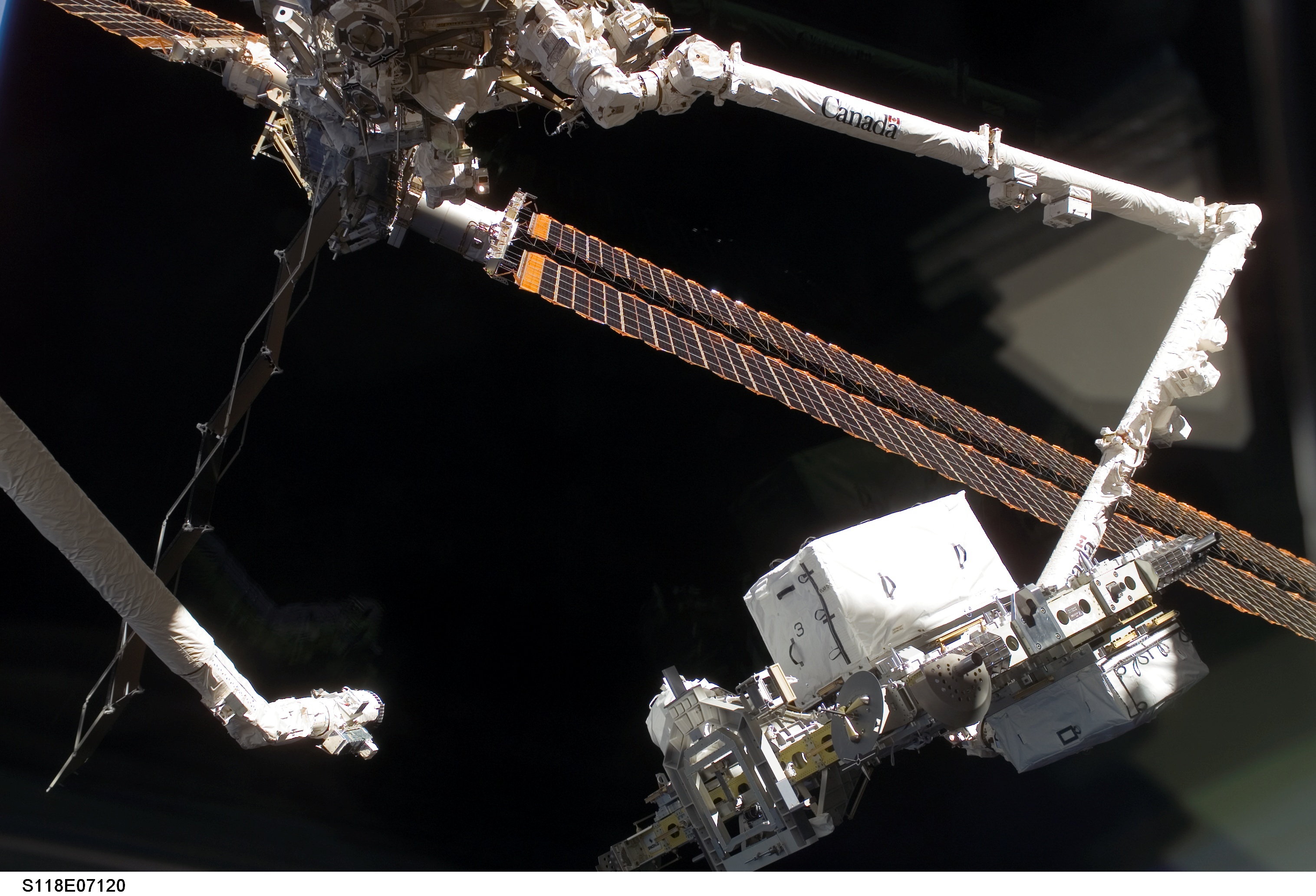
The shuttle’s robotic arm handed off the ESP-3 to the station’s Canadarm2 robotic arm for installation to the P3 truss on Aug. 14, 2007.
Astronauts Steve Bowen and Alvin Drew stowed a failed ammonia pump module on the ESP-2 during a spacewalk on Feb. 28, 2011.

External stowage platforms (ESPs) are key components of the International Space Station (ISS). Each platform is an external pallet that can hold spare parts, also known as orbital replacement units (ORUs), for the space station. As a platform it is not pressurized, but does require electricity to power the heaters of some of the stored equipment. ORUs are attached to the ESP via Flight Releasable Attachment Mechanisms (FRAMs), matching witness plates that mate the ORU to the platform.
The first of the external stowage platforms, called ESP-1, was installed on the port side trunnion pin on the outer hull of the Destiny Laboratory Module on March 13, 2001 during the second spacewalk of the STS-102 space shuttle mission. It is powered by the Unity Module and has two attach points to store ORUs.
ESP-2 was installed with the assistance of space shuttle Discovery’s robotic arm and two spacewalkers during the STS-114 mission. It is much larger than ESP-1 with eight FRAM sites creating room for up to eight spare parts (ORUs). Like ESP-1, it is powered by the Unity Module. However, unlike ESP-1, it is attached to the Quest Joint Airlock using a specialized ESP Attachment Device (ESPAD).
ESP-3 was installed on the P3 Truss on August 14, 2007 during the space shuttle STS-118 mission. It has seven attachment sites for spare parts and ORUs. The platform also has handrails and attachment points for tethers and foot restraints that astronauts can use while working with the ORUs on the ESP-3. ESP-3 and ESP-2 have the same dimensions, approximately 8.5 feet long and 14 feet wide. ESP-3 has two grapple fixtures to aid deployment.
ESP-3 was the first major station element to be installed completely by robotics, using only the shuttle and station’s robotic arms, an external berthing camera system and a Photovoltaic Radiator Grapple Fixture. Astronauts robotically installed the platform onto the station’s P3 truss segment during the STS-118 mission’s seventh day.
On January 12, 2010, the station’s robotic arm was used again to move ESP-3 from the P3 truss segment. It was grappled by the arm and then transferred down the station’s backbone on the mobile transporter. ESP-3 was then attached to its new location on the lower part of S3 truss segment. This cleared the way for ExPRESS Logistics Carrier-3 to be installed during STS-134.
Mission Overview
External Stowage Platform-1 Launch: 3/8/01
Installation: 3/13/01
Assembly Mission: 5A.1
Shuttle Mission: STS-102
Vehicle: Space Shuttle Discovery
Crew on station: Expedition 1
External Stowage Platform-2 Launch: 7/26/05
Installation: 7/30/05
Assembly Mission: LF1
Shuttle Mission: STS-114
Vehicle: Space Shuttle Discovery
Crew on station: Expedition 11
External Stowage Platform-3 Launch: 8/8/07
Installation: 8/14/07
Assembly Mission: 13A.1
Shuttle Mission: STS-118
Vehicle: Space Shuttle Endeavour
Crew on station: Expedition 15