Development of a Bike-Sharing System Based on Pedal-Assisted Electric Bicycles for Bogota City

 , ,
, ,
Abstract
:1. Introduction
- A long-standing industry and experience in electric motors (e.g., Siemens), metalworking and machining.
- Numerous companies dedicated to the design and manufacture of bicycles.
- A deep-rooted culture of bicycle use.
- How should be a public transport system based on shared electric bicycles be implemented so that it is sustainable, safe and appropriate to the characteristics of the bike-users of Bogota City?
1.1. Pedaling Assistance Systems for Electric Bicycles
1.2. Electric Motors and Powertrain Systems for E-Bikes
1.3. Energy Accumulators and Batteries for E-Bikes and Their Charging Systems
1.4. IoT and E-Bikes Sharing Systems
2. Related Work
2.1. Information and Communications Technologies for Bike-Sharing Systems
2.1.1. Transportation and Mobile Apps
2.1.2. Bike-Sharing Systems and Data Mining
2.2. Charging Systems for Electric Bicycles
2.3. Electric Bicycles in Colombia and Latest Developments Worldwide
2.3.1. Colombia
2.3.2. Worldwide
3. Electronic Design and Development of an E-Bike-Sharing System for Bogota City
3.1. System Overview
3.2. Embedded System for Bike-Users’ Characterization
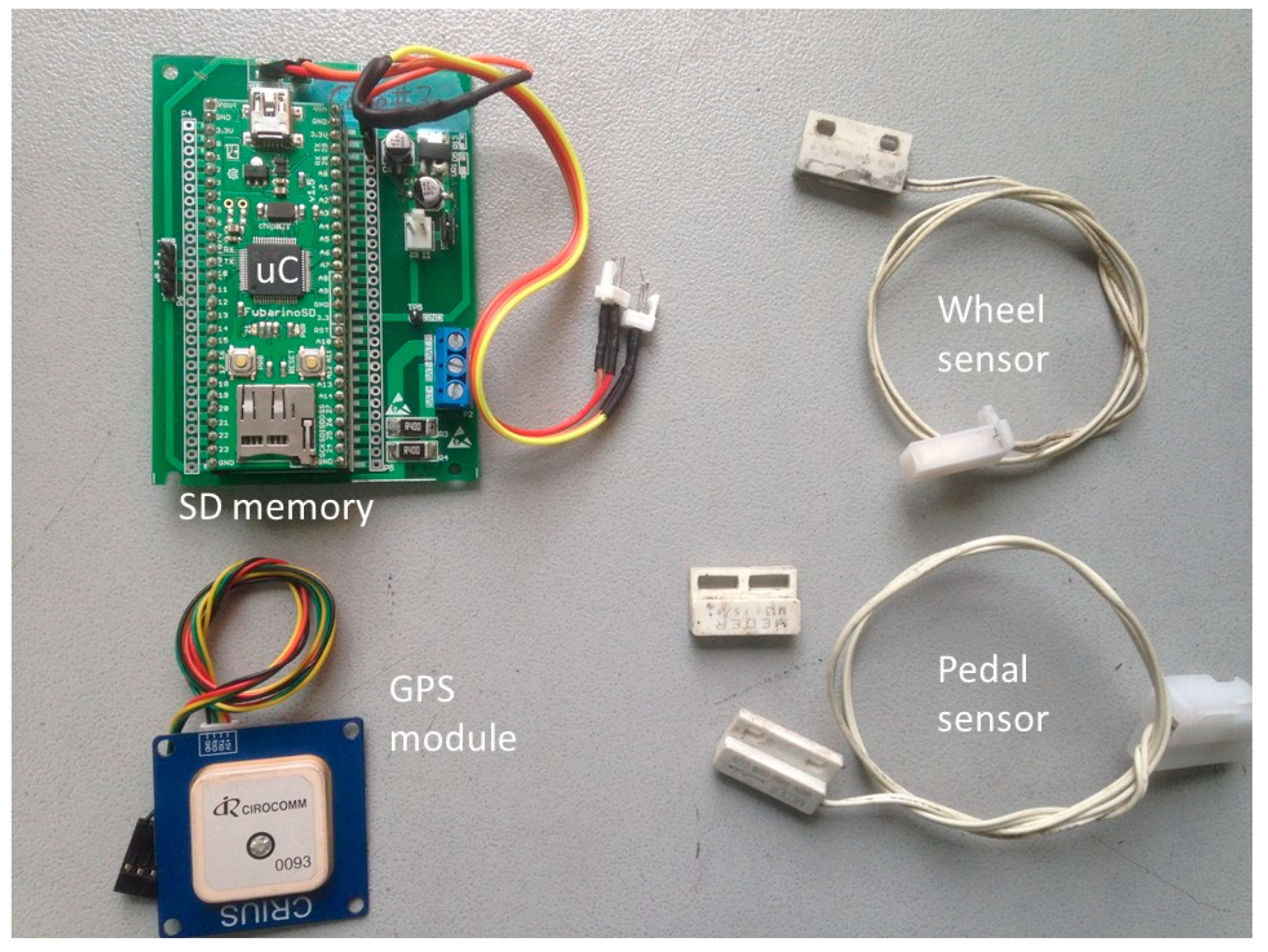
3.2.1. Custom-Made On-Board Computer OBC
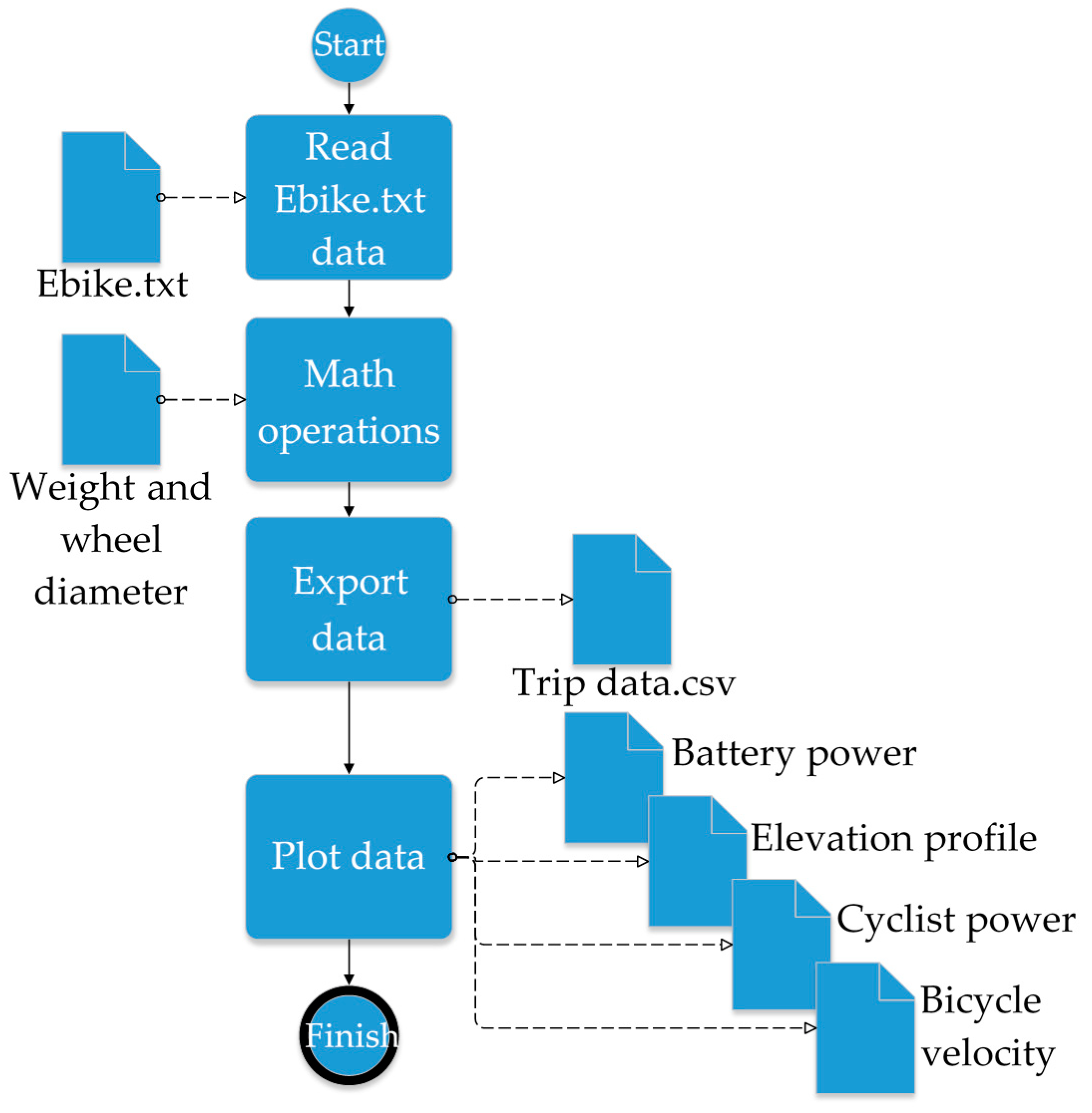
3.2.2. Processing Software
3.3. BLDC Based Motor Propulsion System for an Electric Bicycle
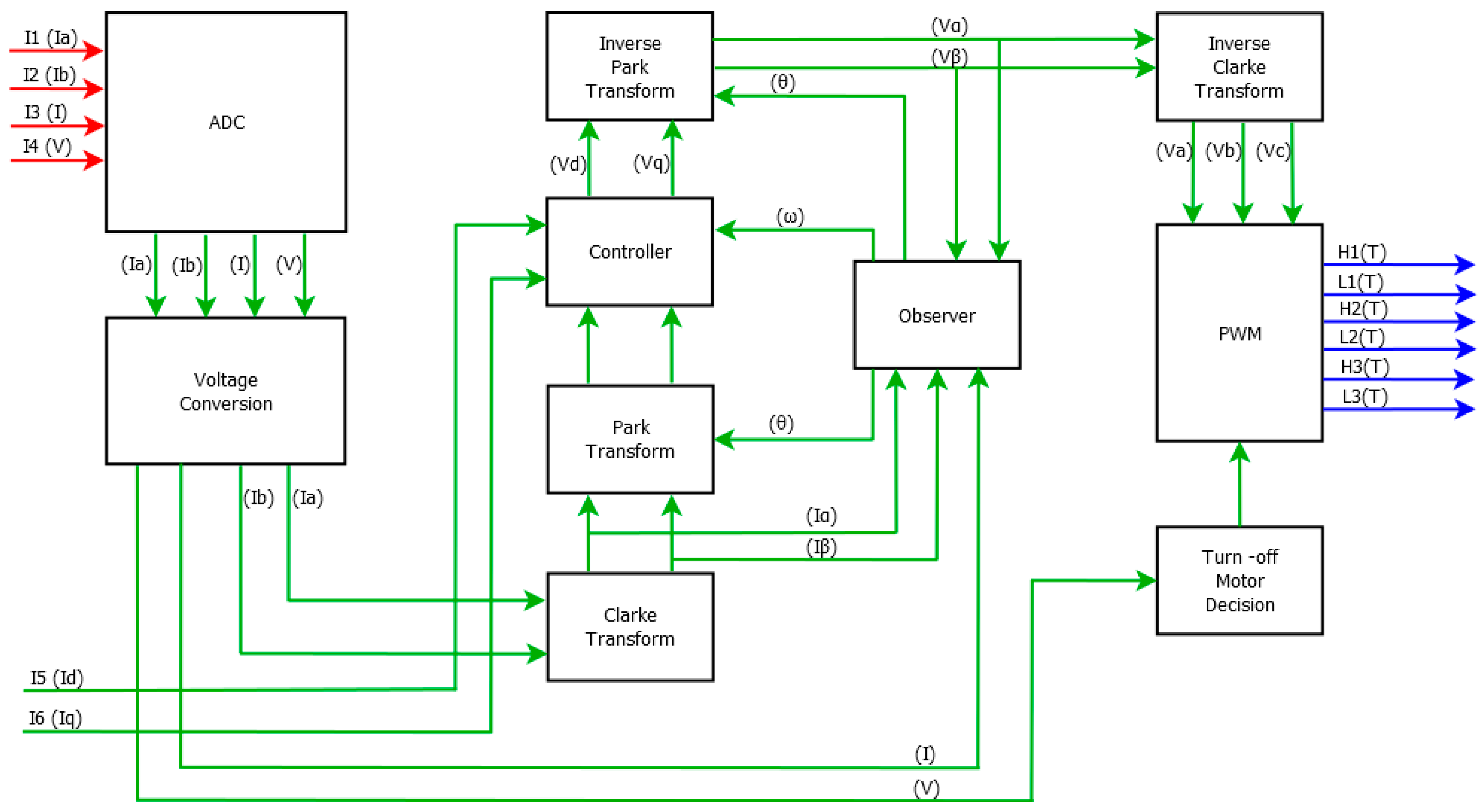
3.3.1. Control Strategy
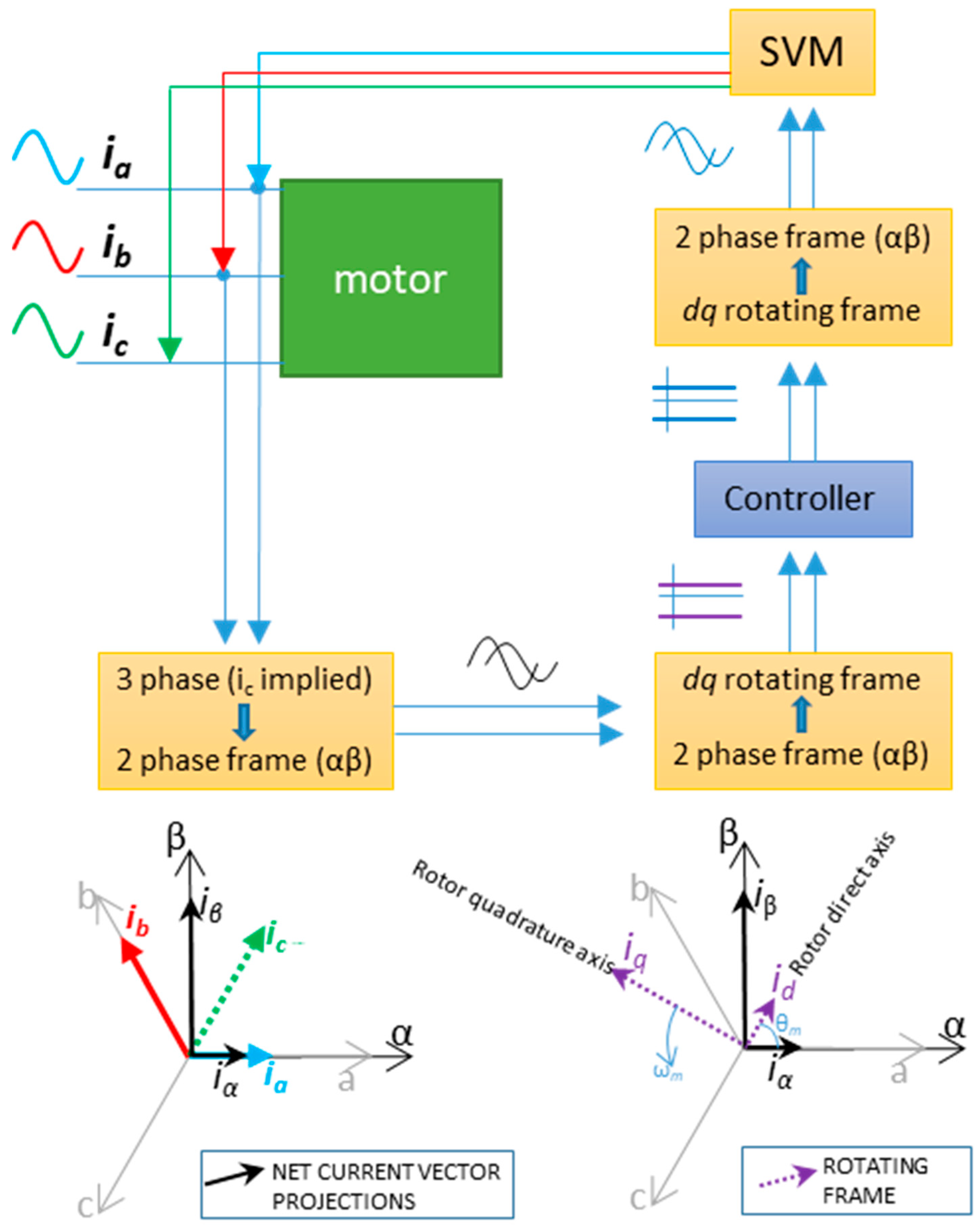
- The currents of each of the three phases in the stators are measured. These are transformed from the static three-phase reference frame to the static two-phase reference frame, in which it passes from having three variables to two, the parameters α, β being from the Clarke transform.
- From this reference frame, the next step is to move to the rotating two-phase reference frame by means of the Park transform, leaving two variables d, q. These two variables are controlled.
- The next step is to perform the Park and Clarke inverse transforms remaining in the frame of the static three-phase reference; these are used for pulse-width SVM (space vector modulation) or SVPWM (space-vector pulse-width modulation).
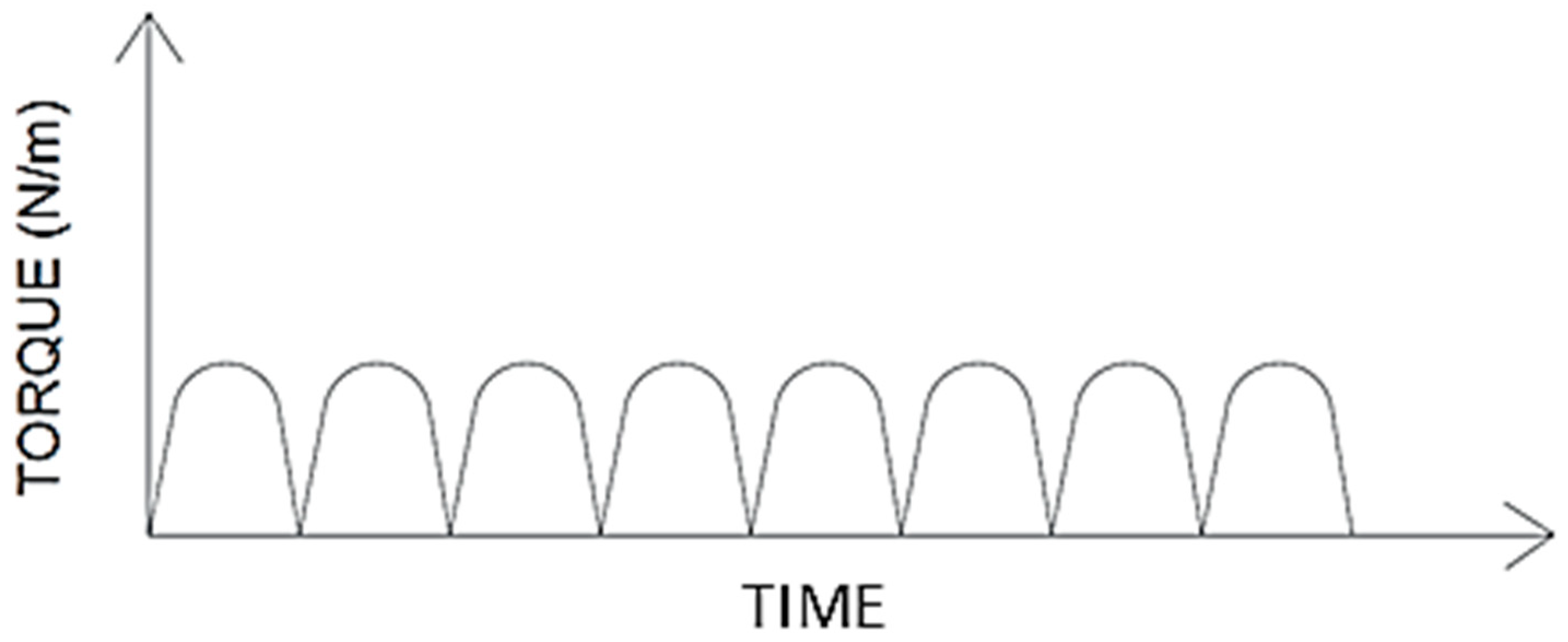
3.3.2. Motor Torque Control
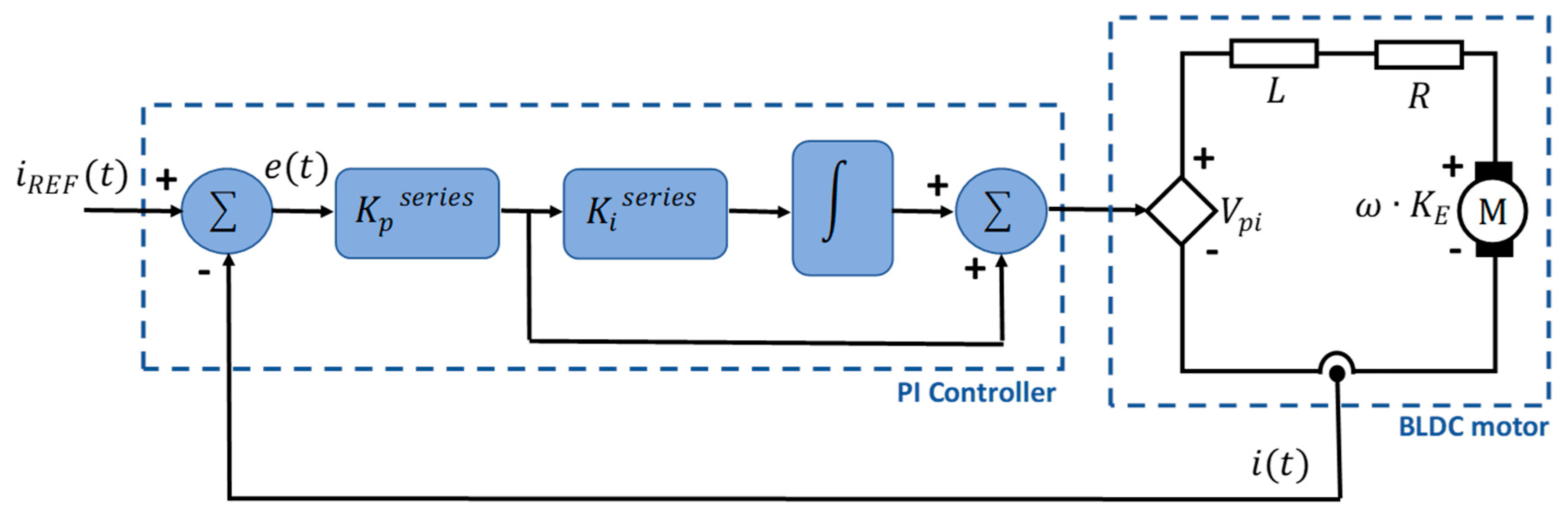
3.3.3. Motor Control Implementation Details
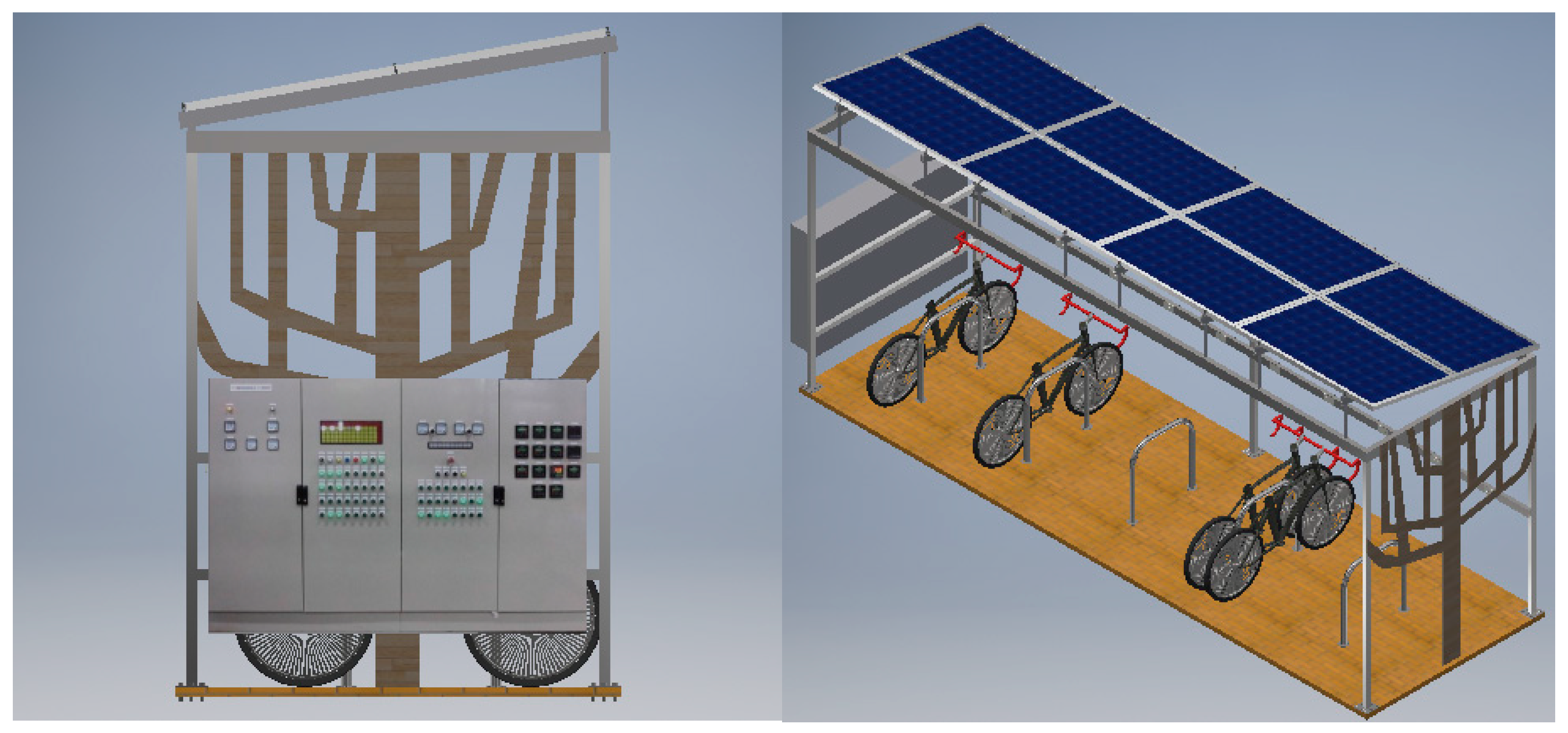
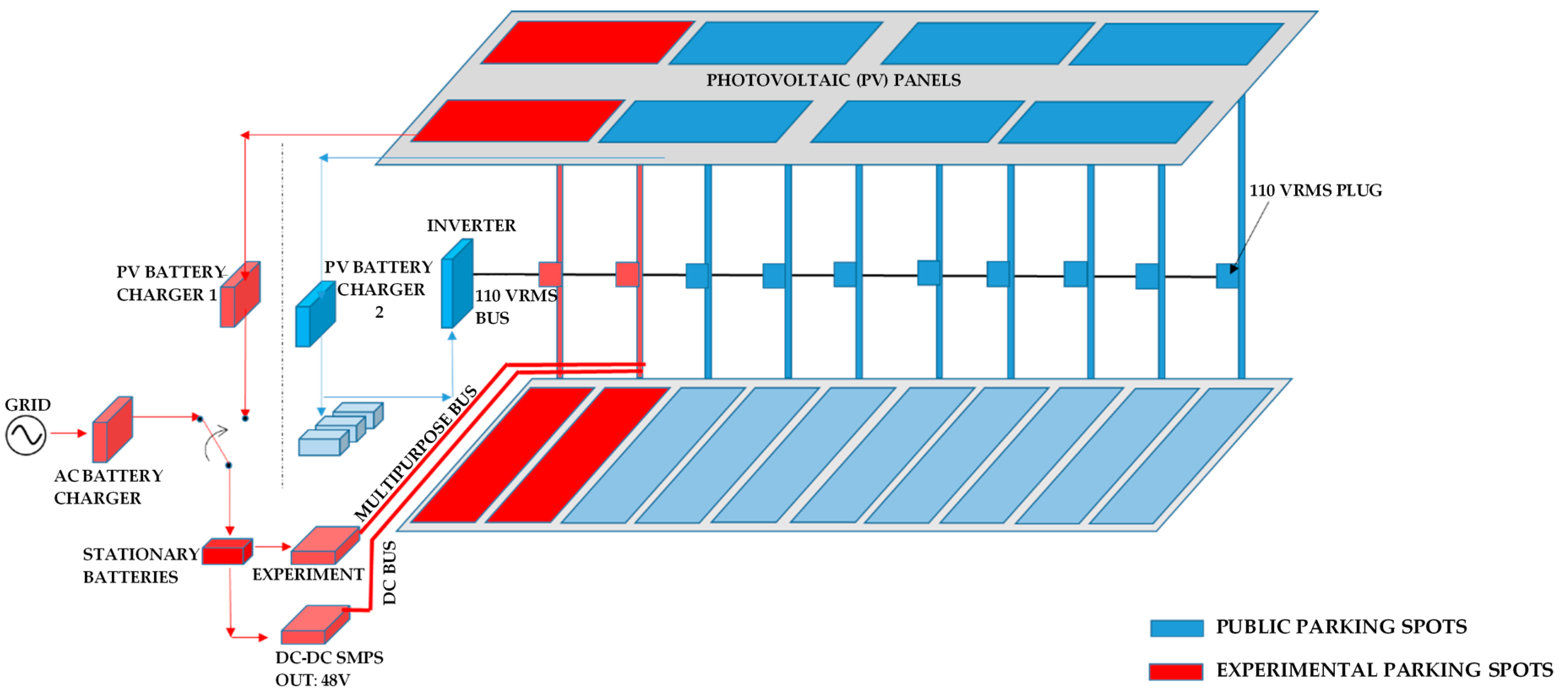
3.4. Charging Station for E-Bike Sharing Systems
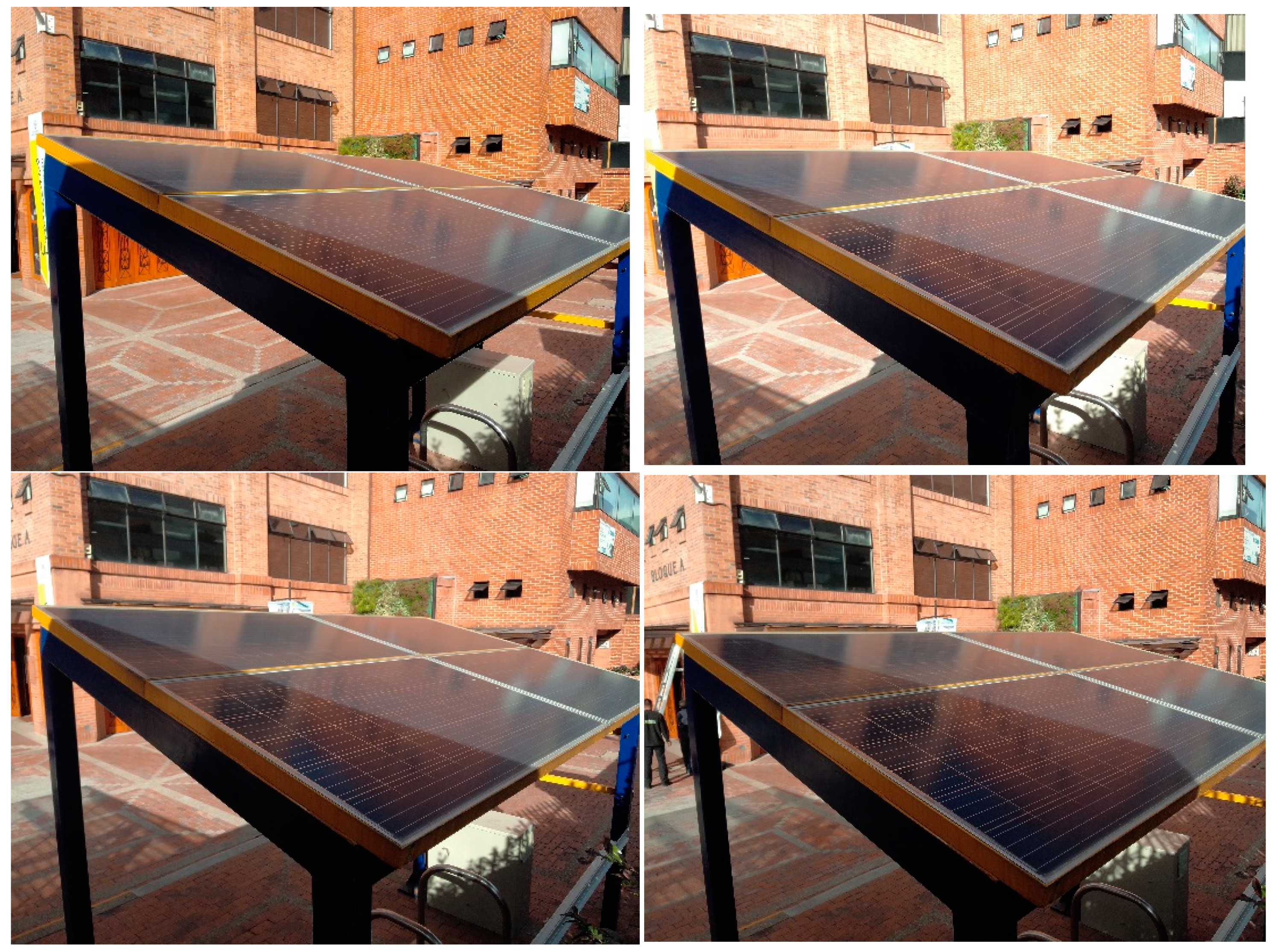
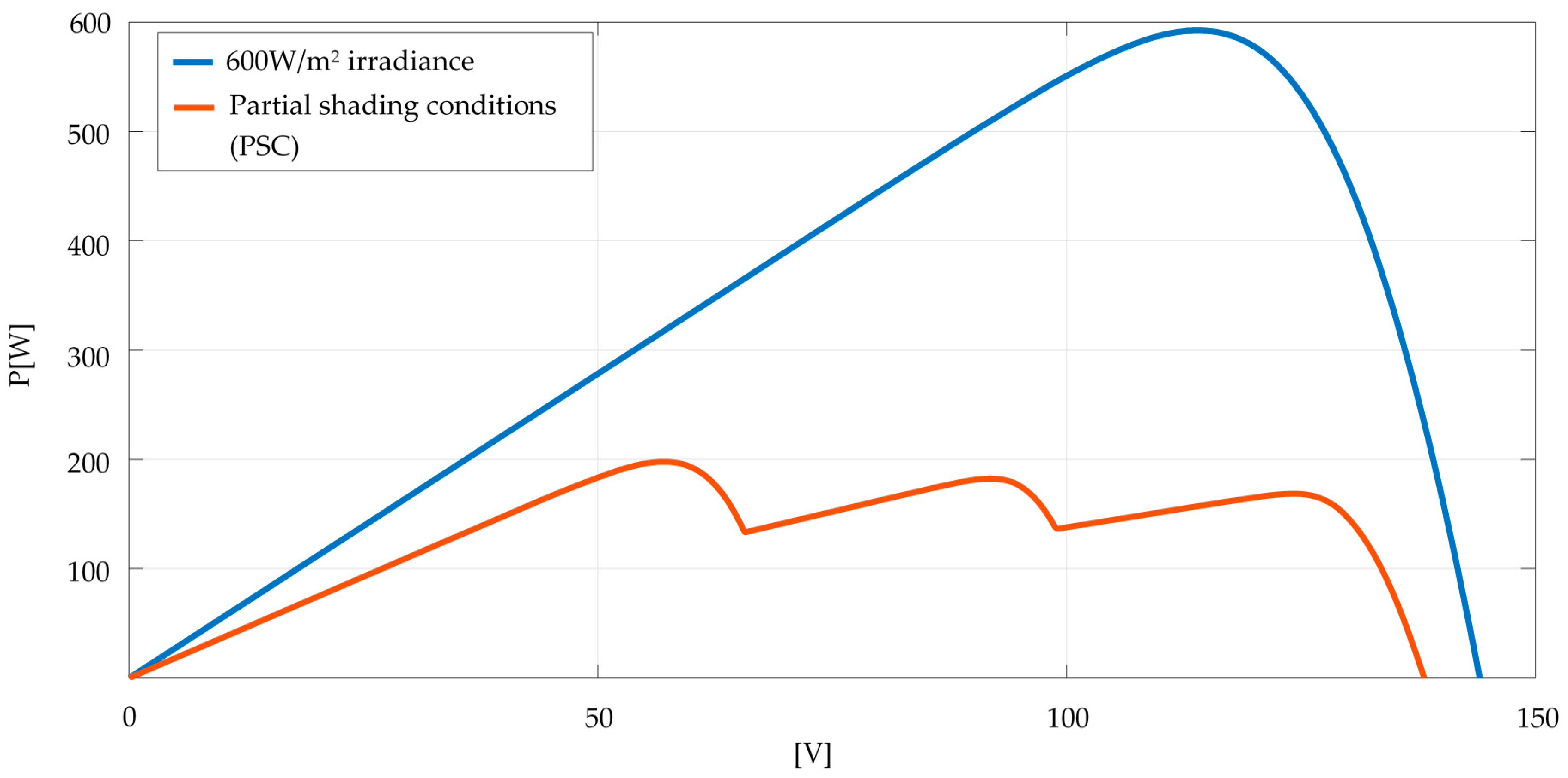
3.4.1. Solar Panels
3.4.2. Solar Charge Controller and Inverter
3.4.3. Stationary Batteries
4. Results
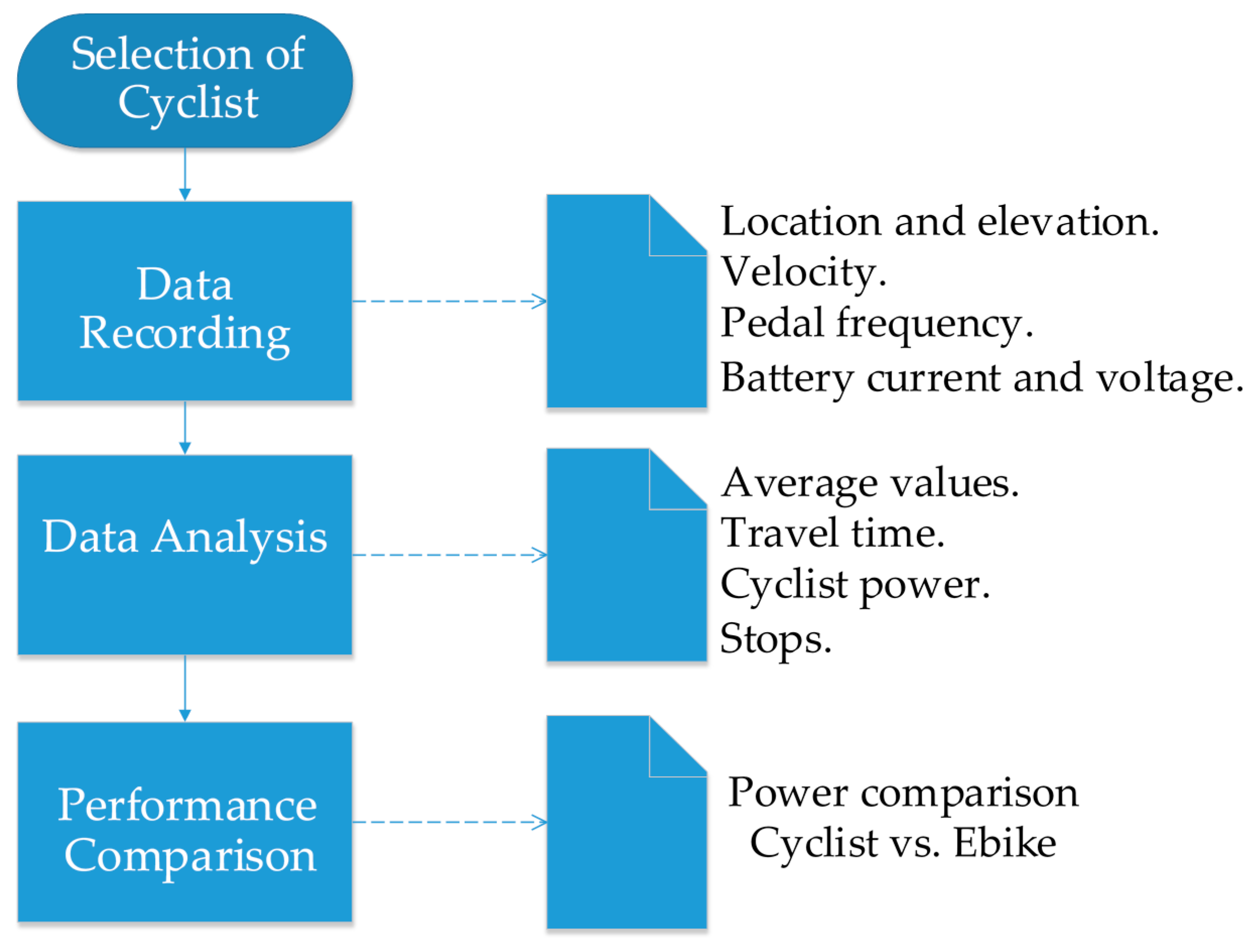
4.1. Embedded System for Bike-Users Characterization
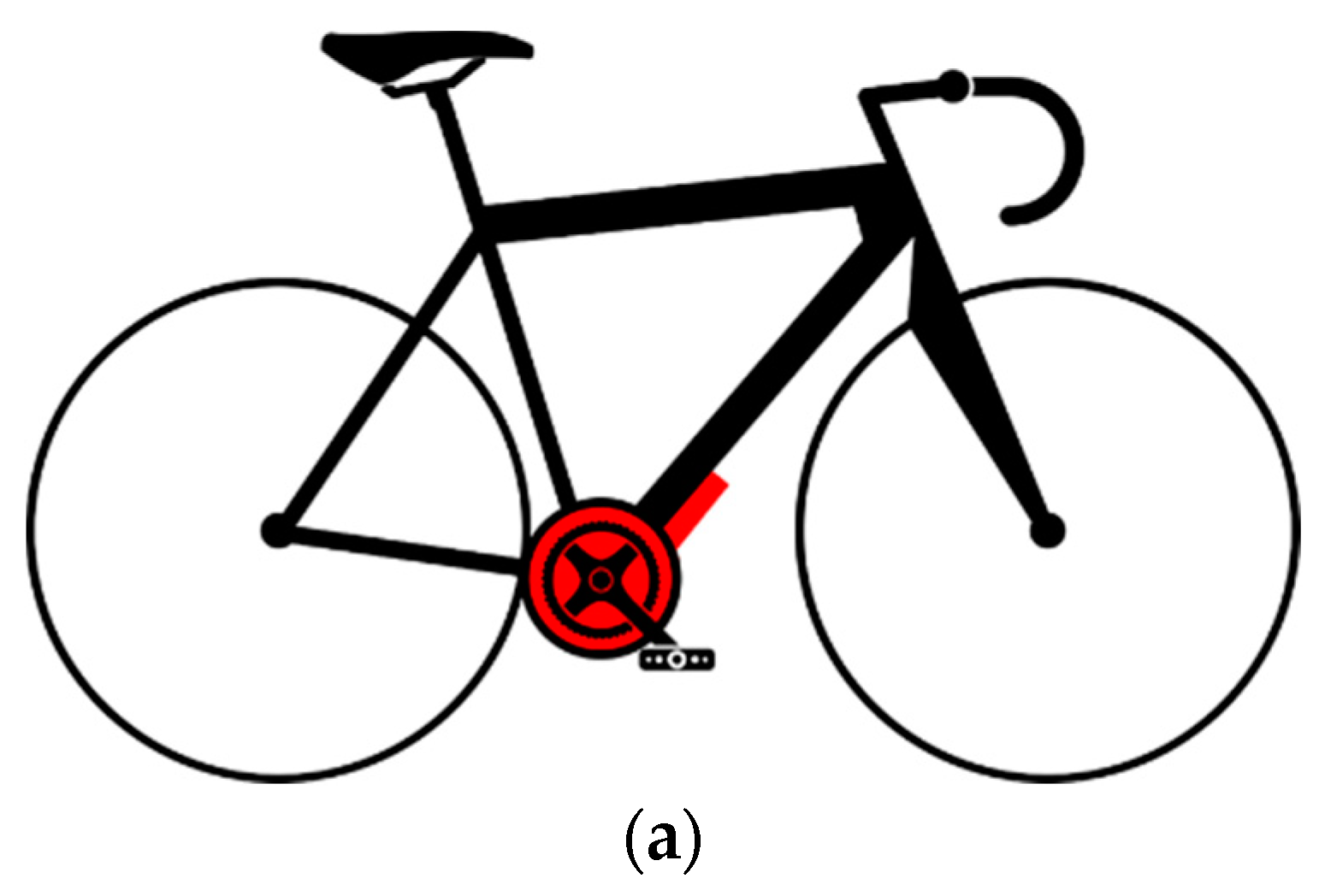
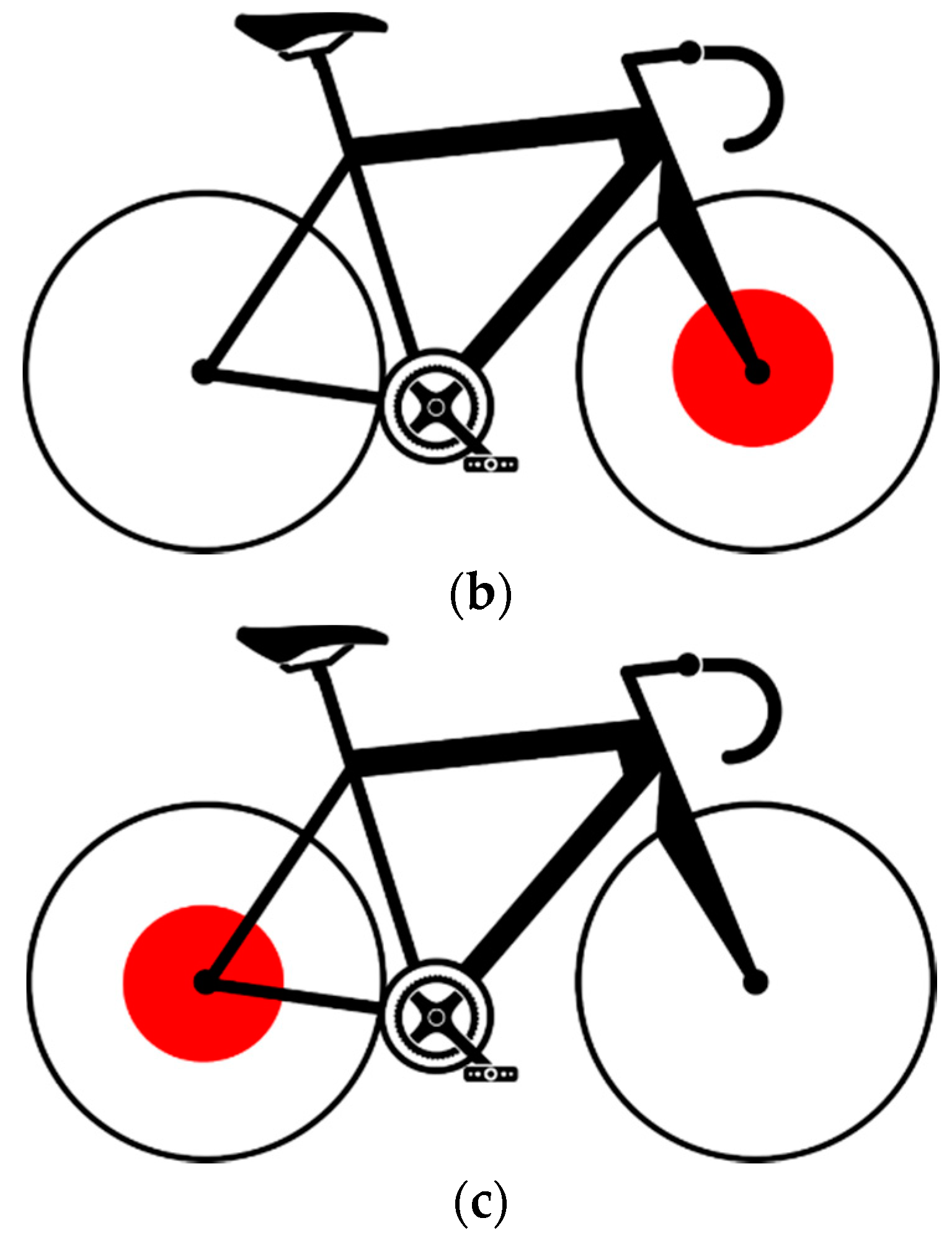
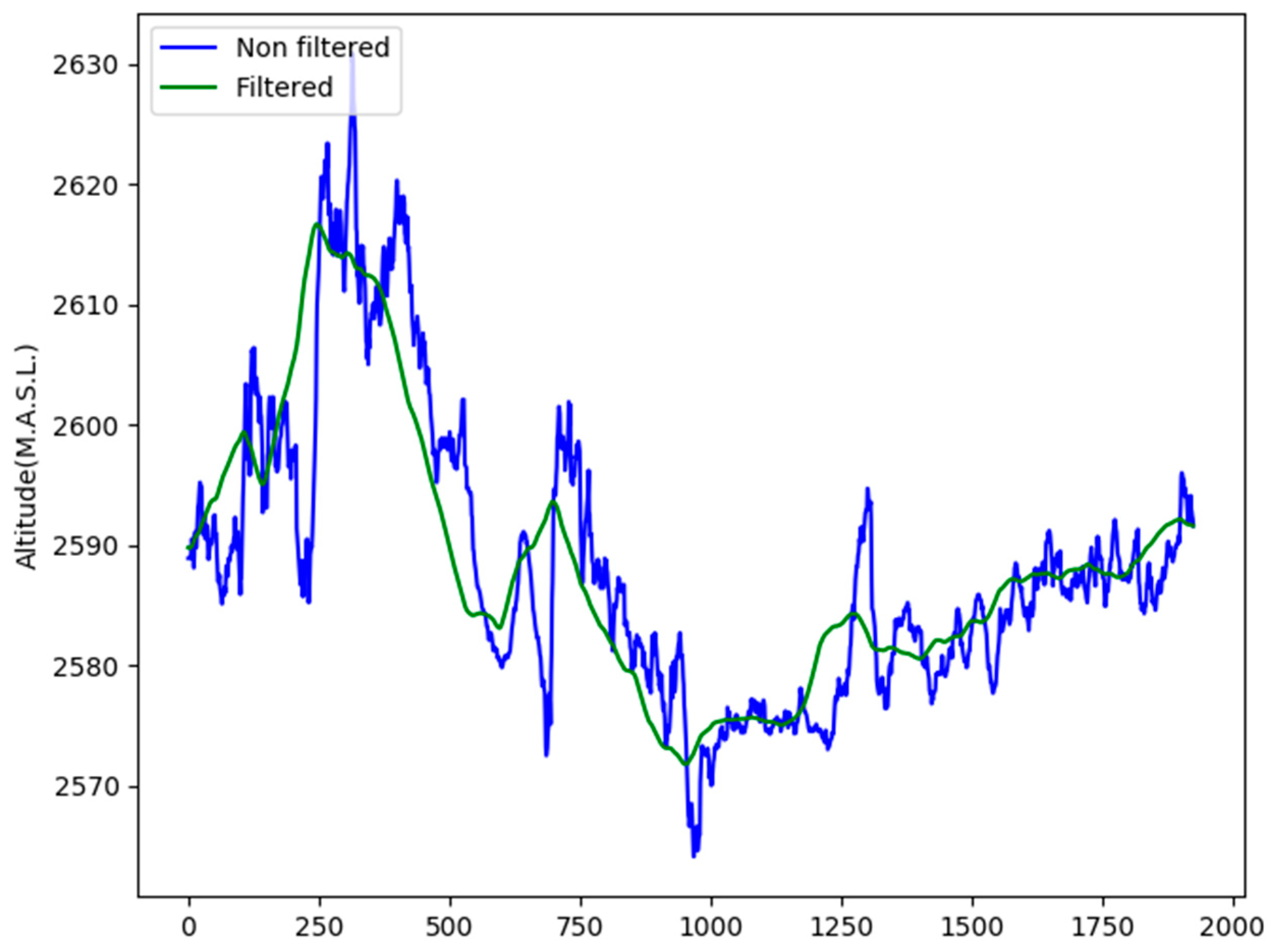
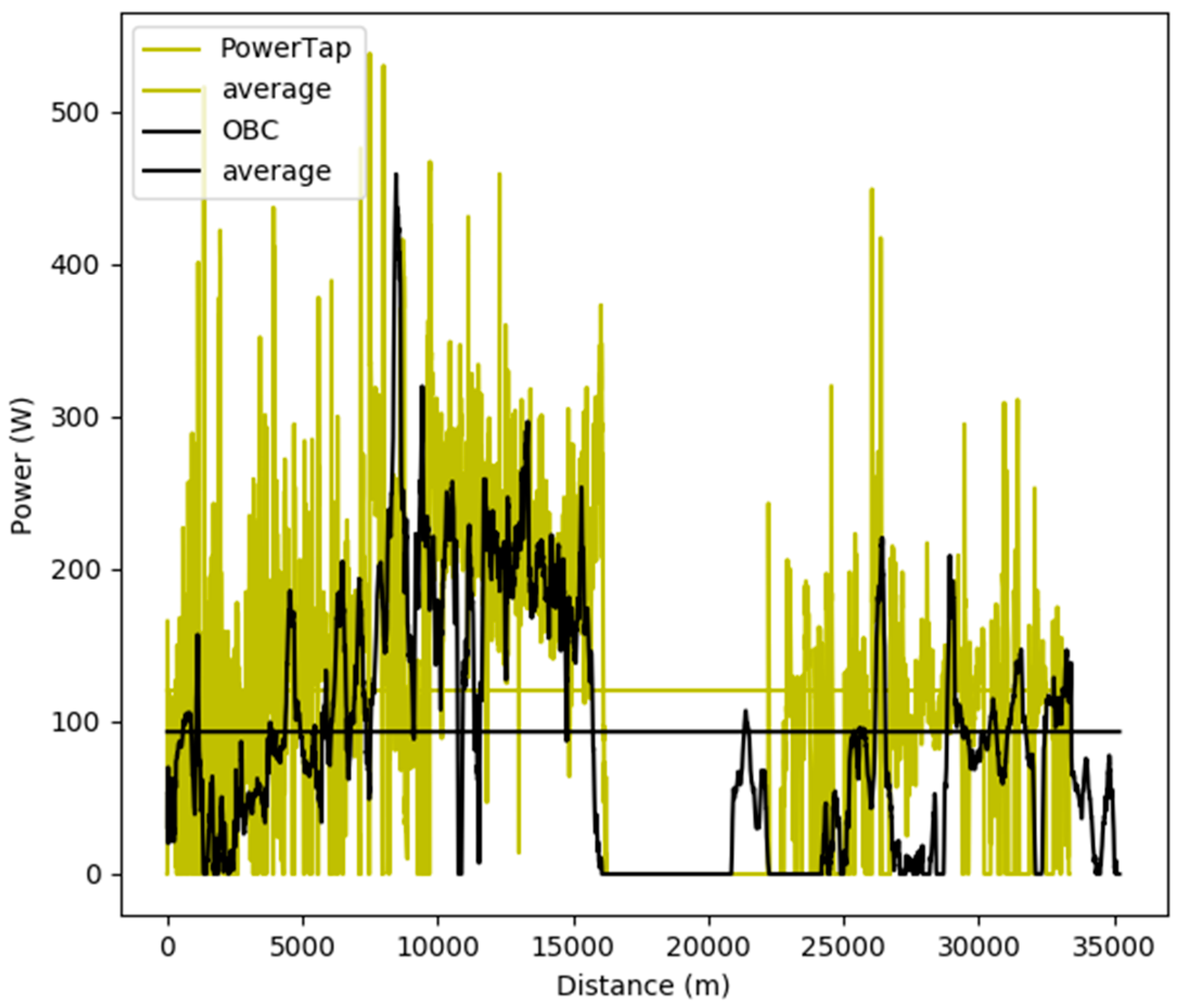
4.1.1. Cyclist Power Estimation
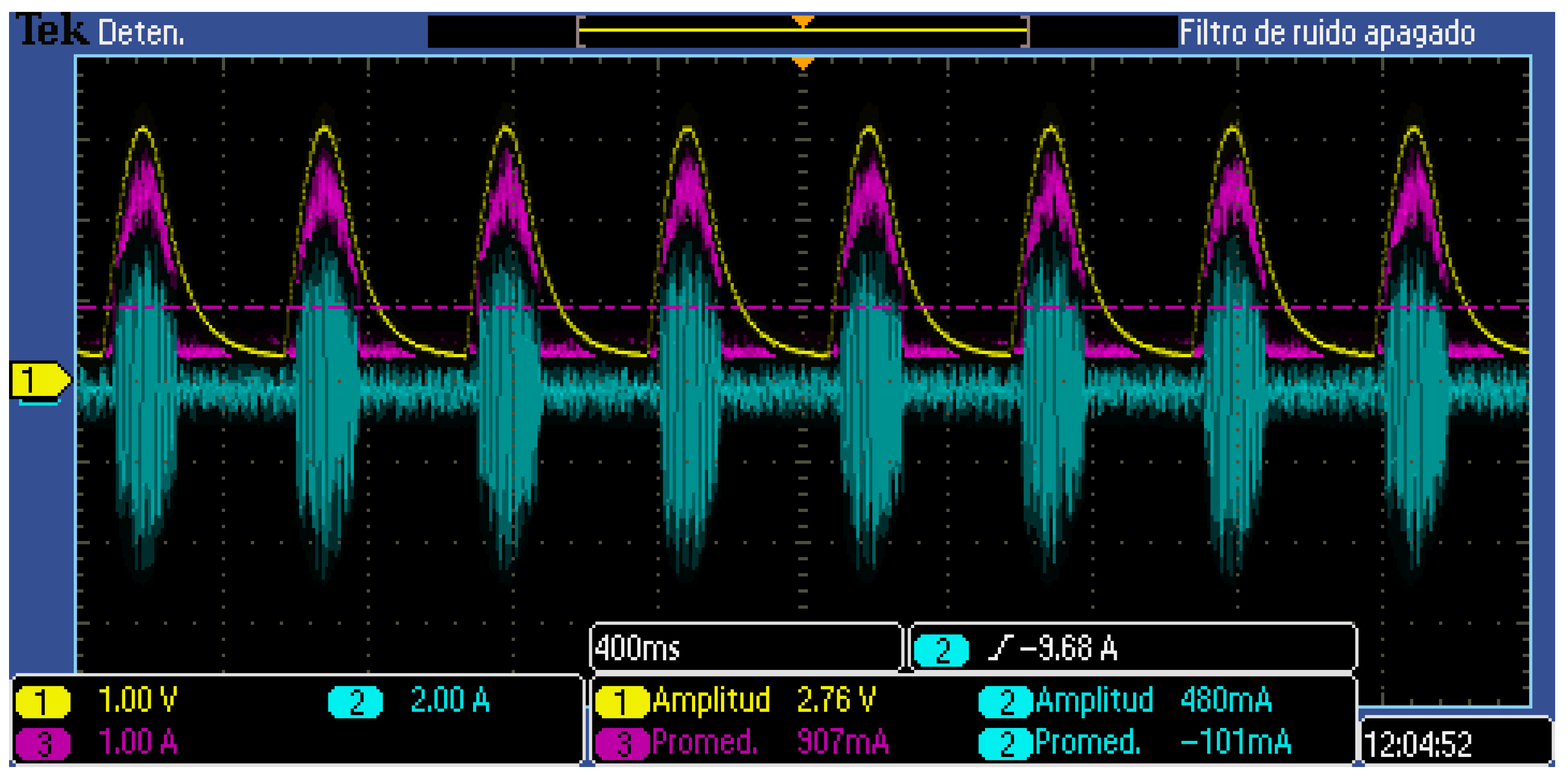
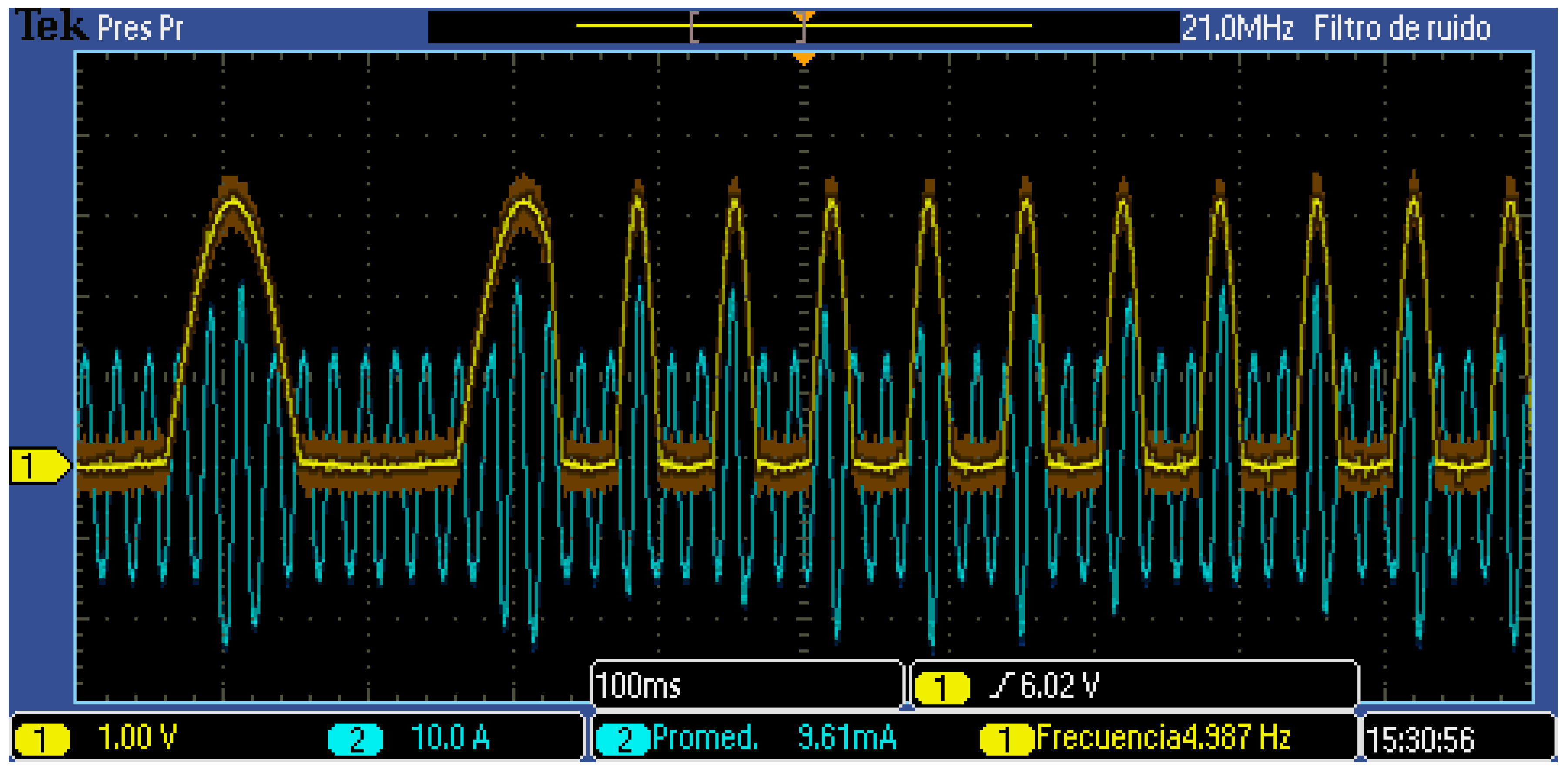
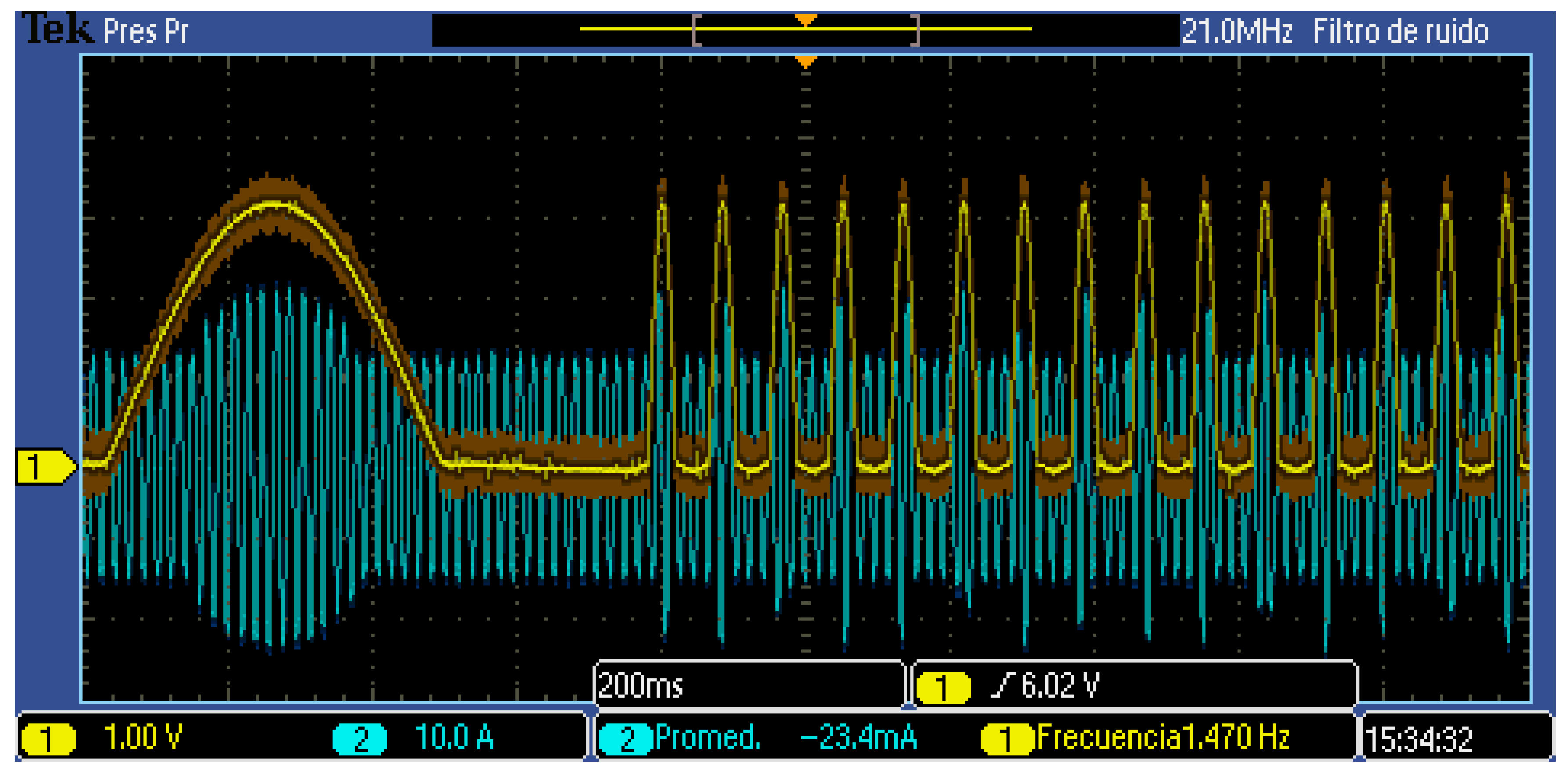
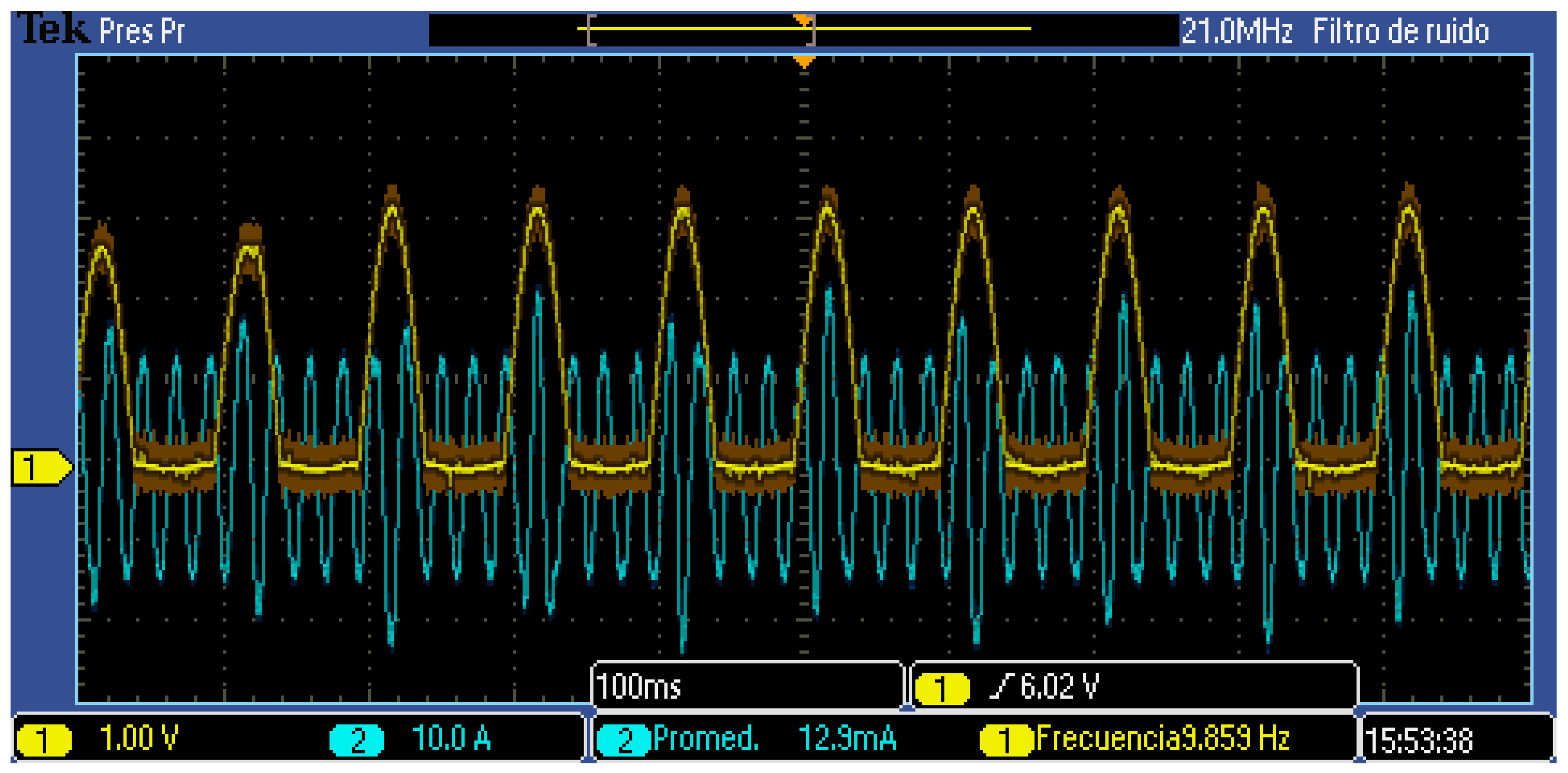
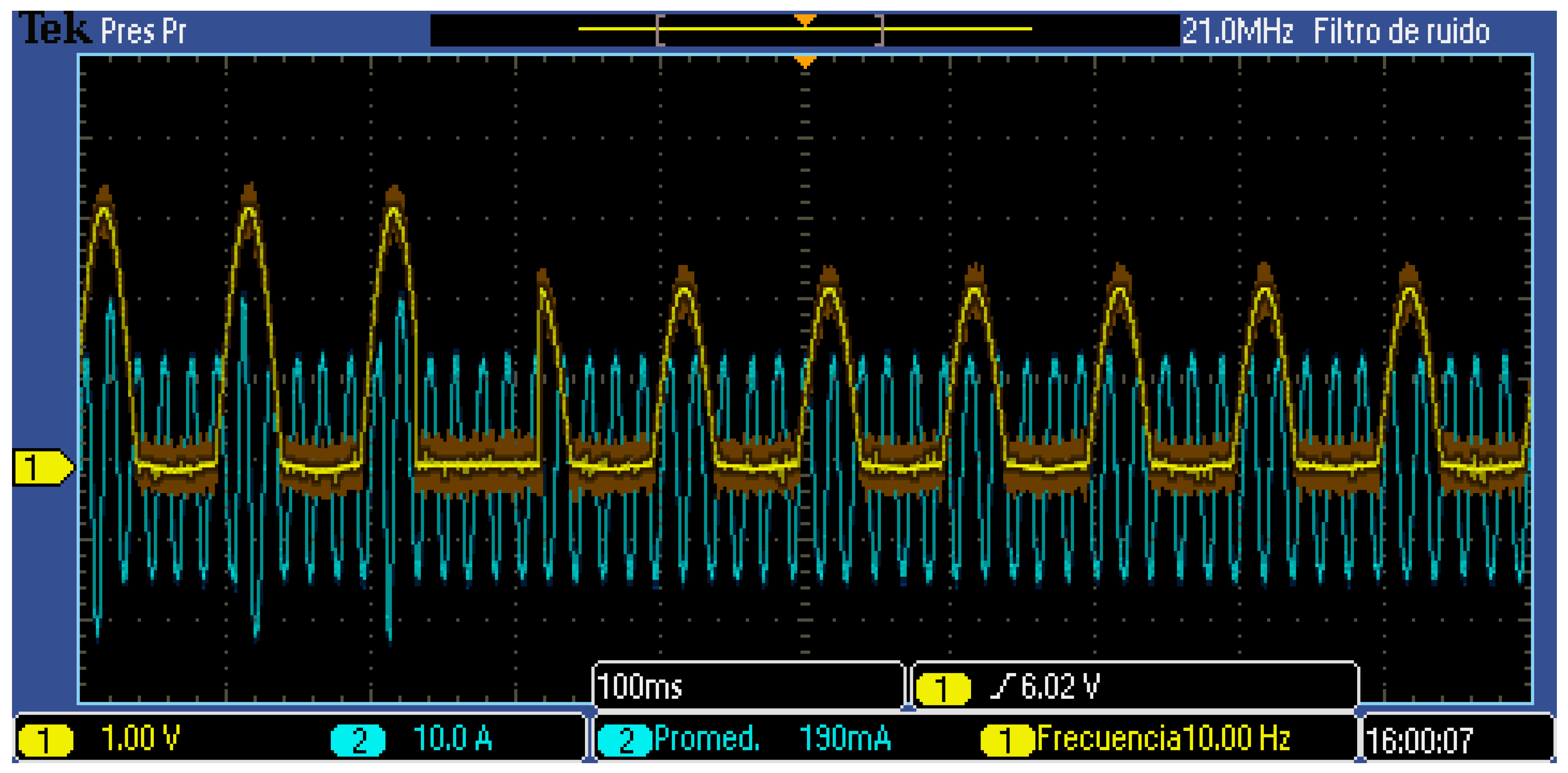
4.1.2. E-Bike Battery Power Measurement
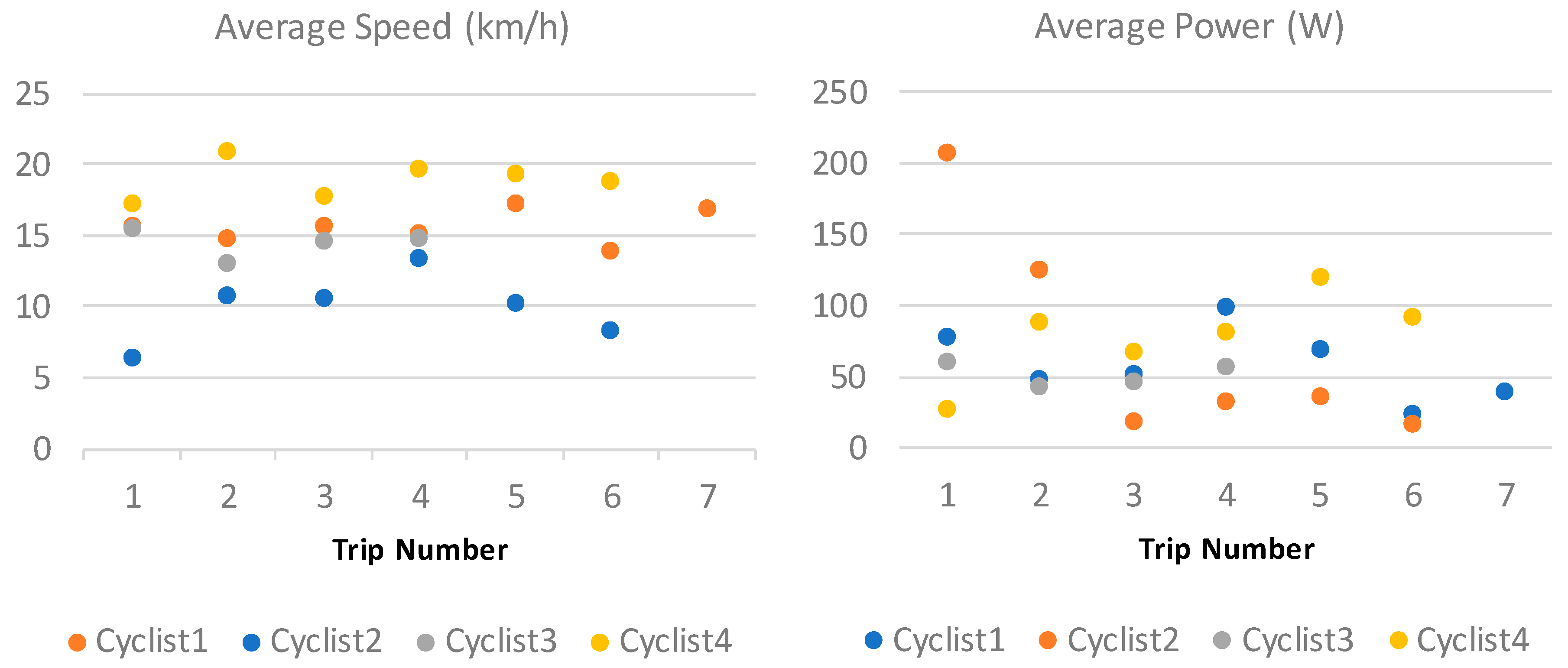
4.1.3. E-Bike User’s Power profiles
4.2. BLDC Motor-Based Propulsion System for an E-Bike
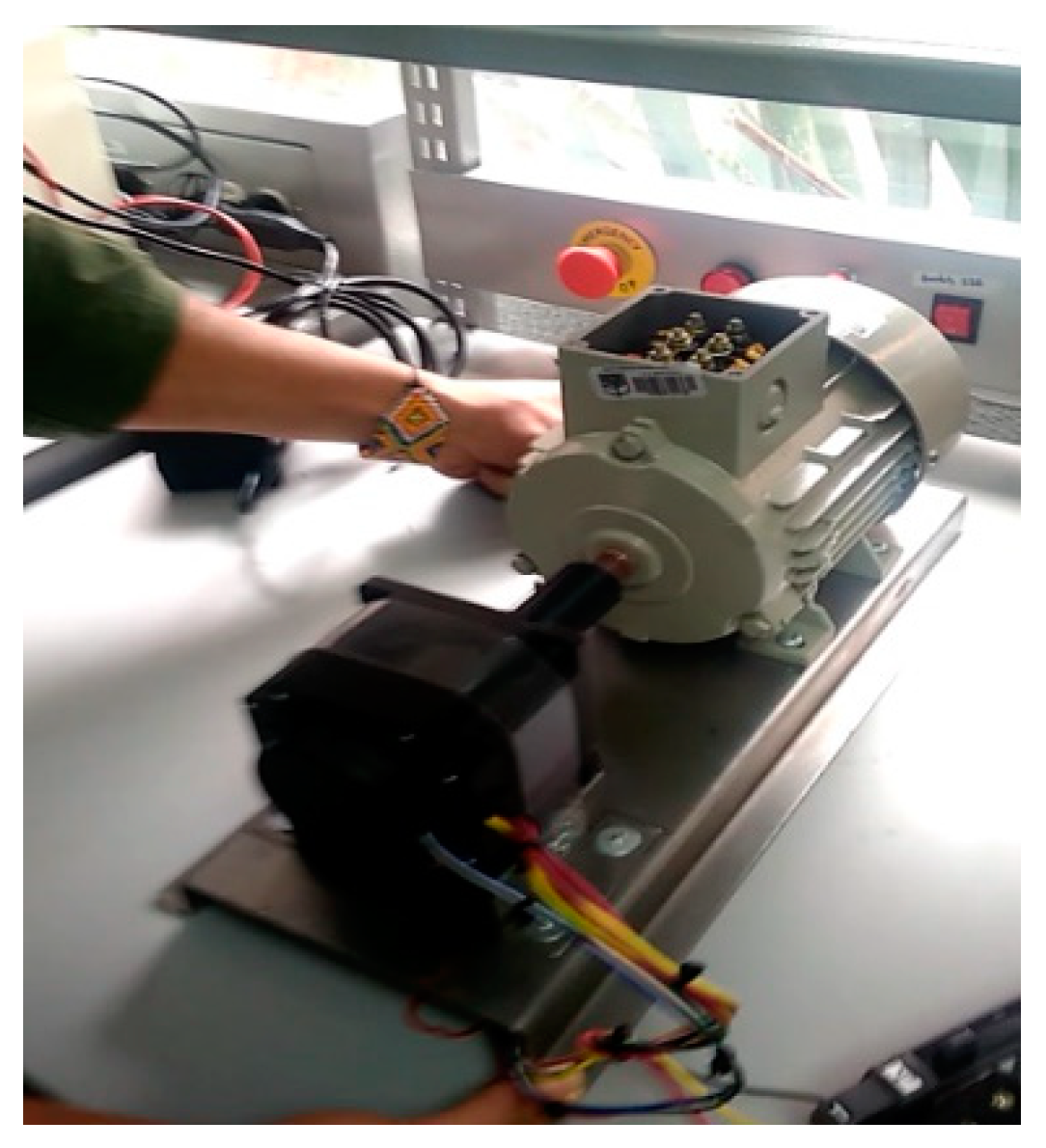
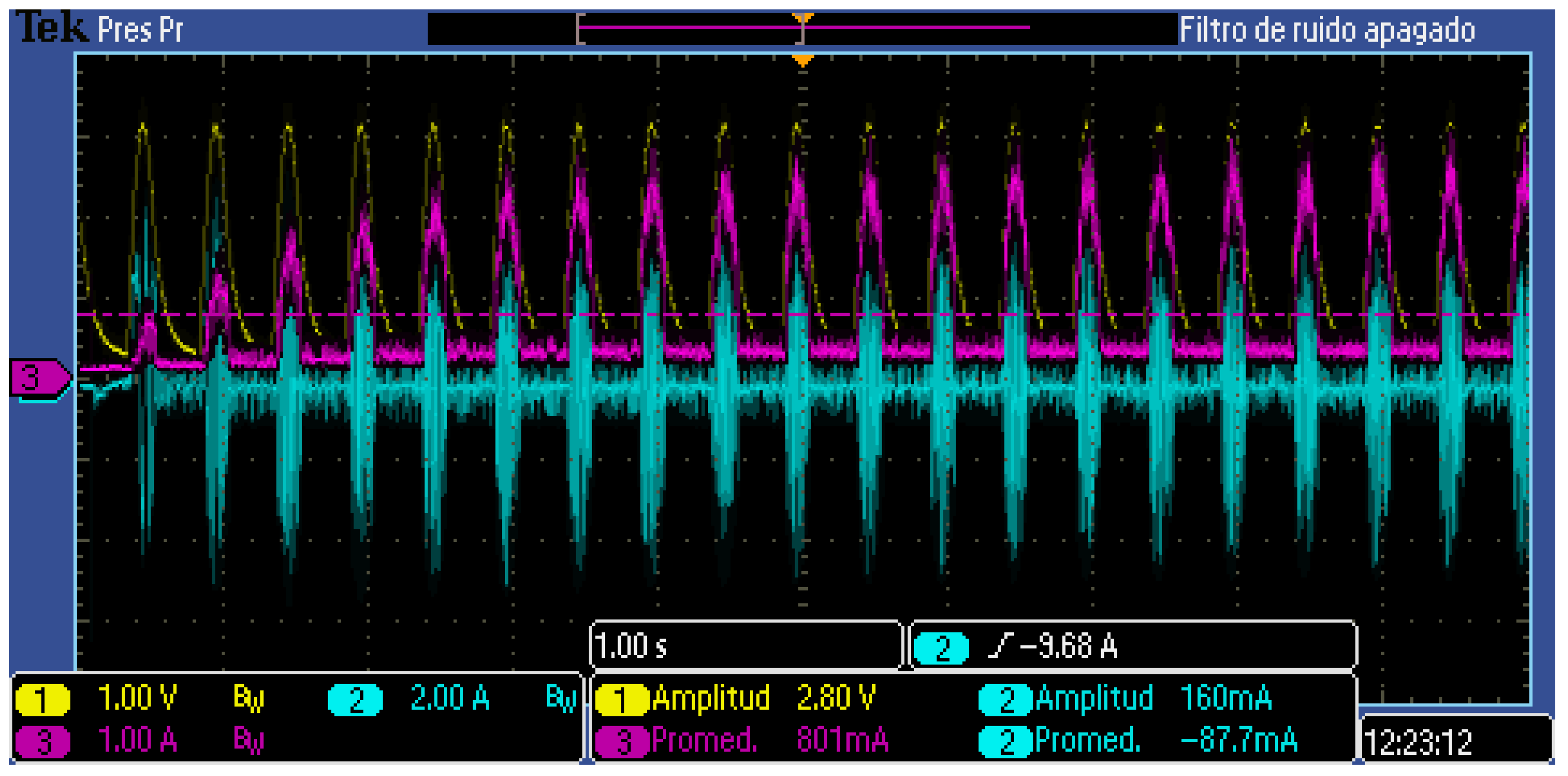
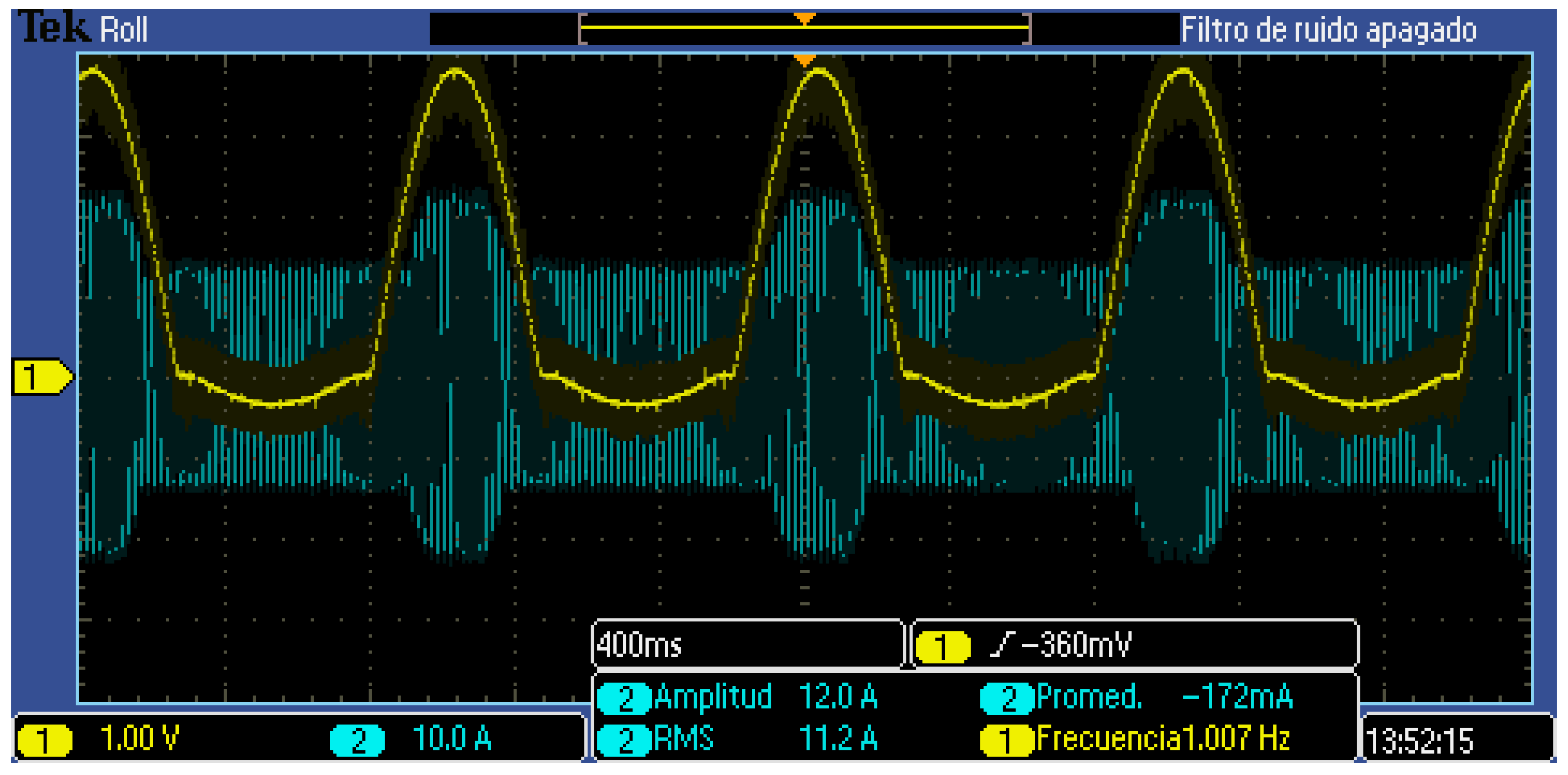
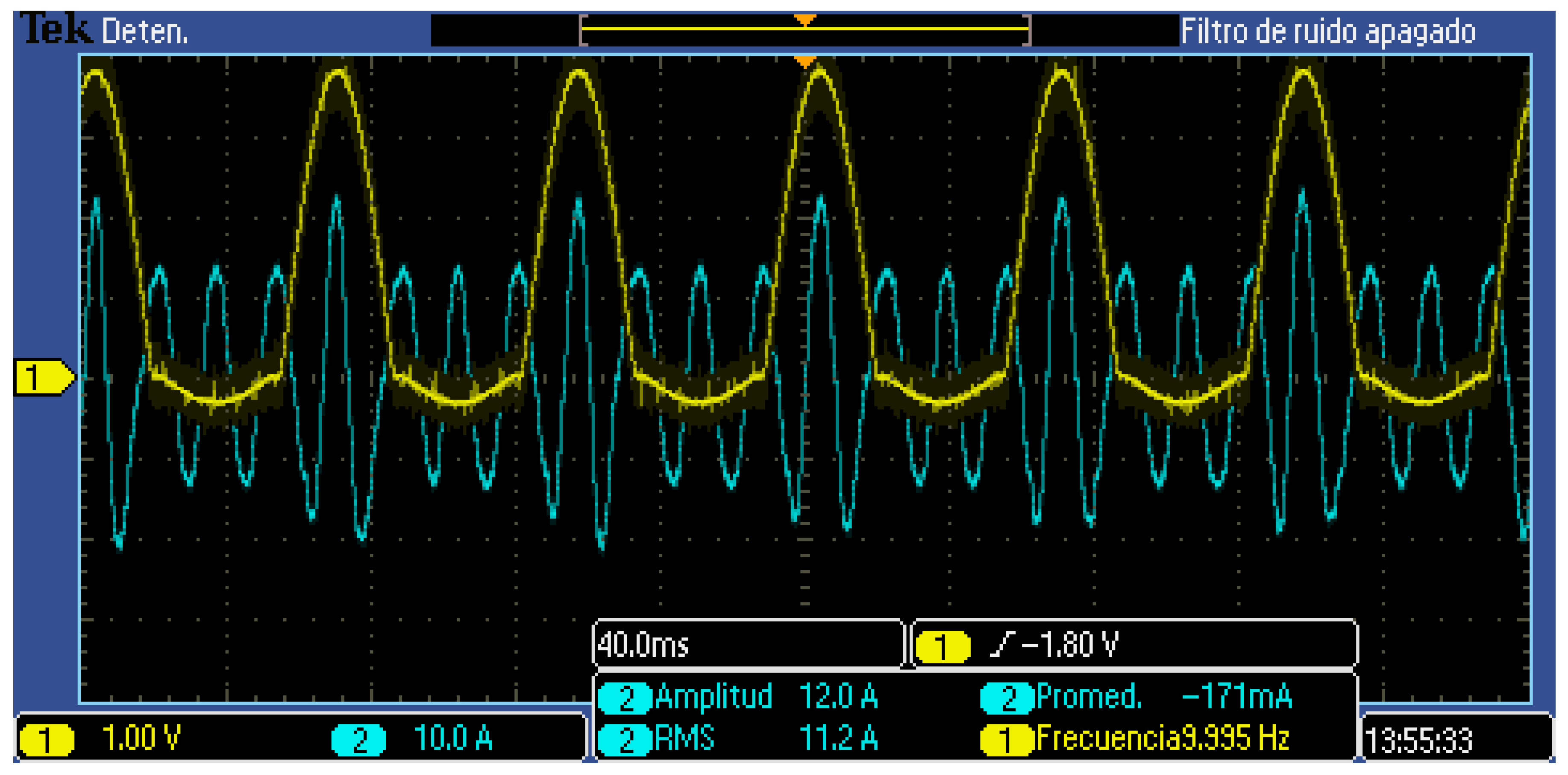
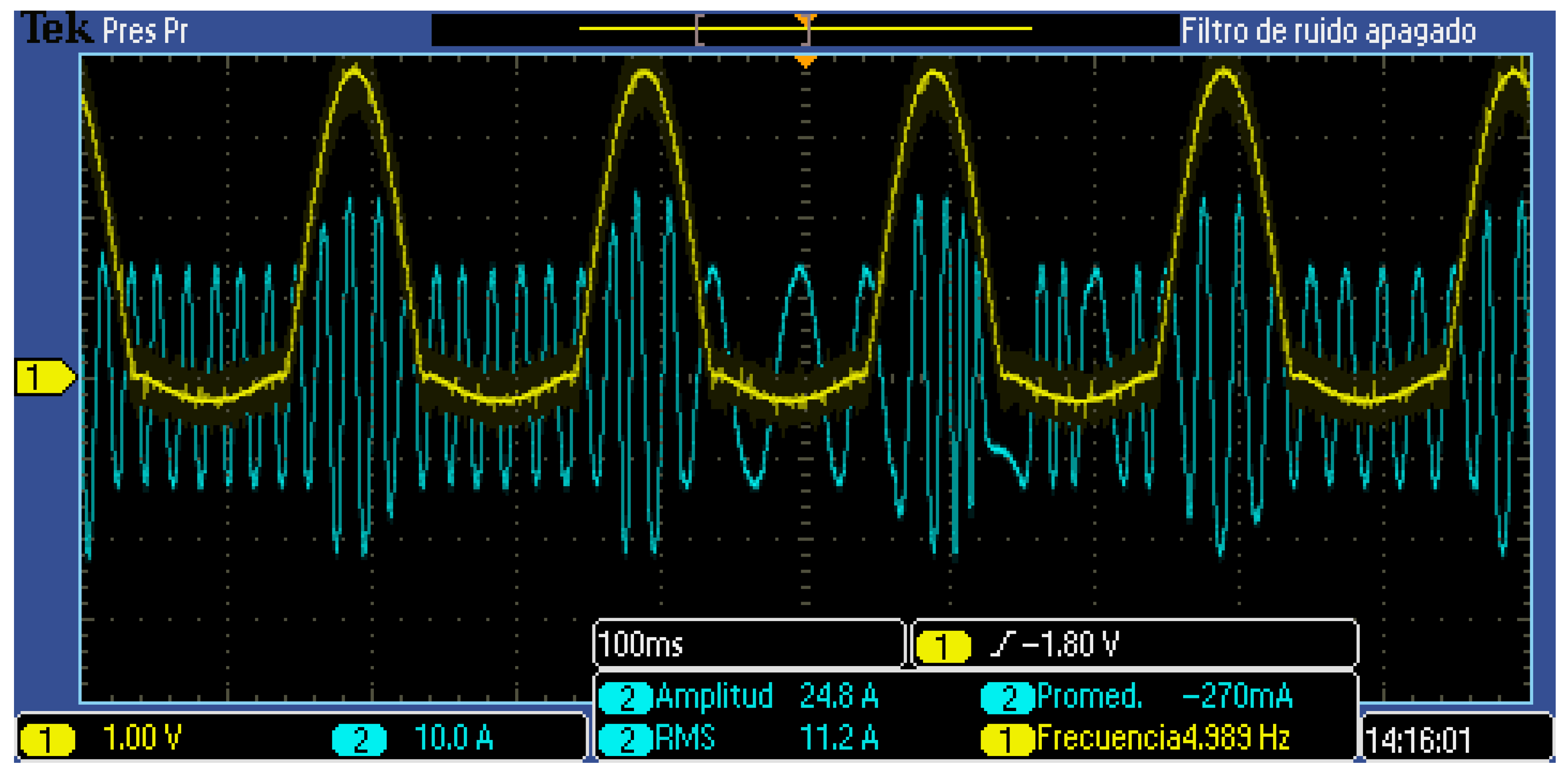
4.2.1. Experimental Results
4.2.2. BLY342S-48V-3200 MOTOR
4.2.3. MTO 5065-170-HA-C MOTOR
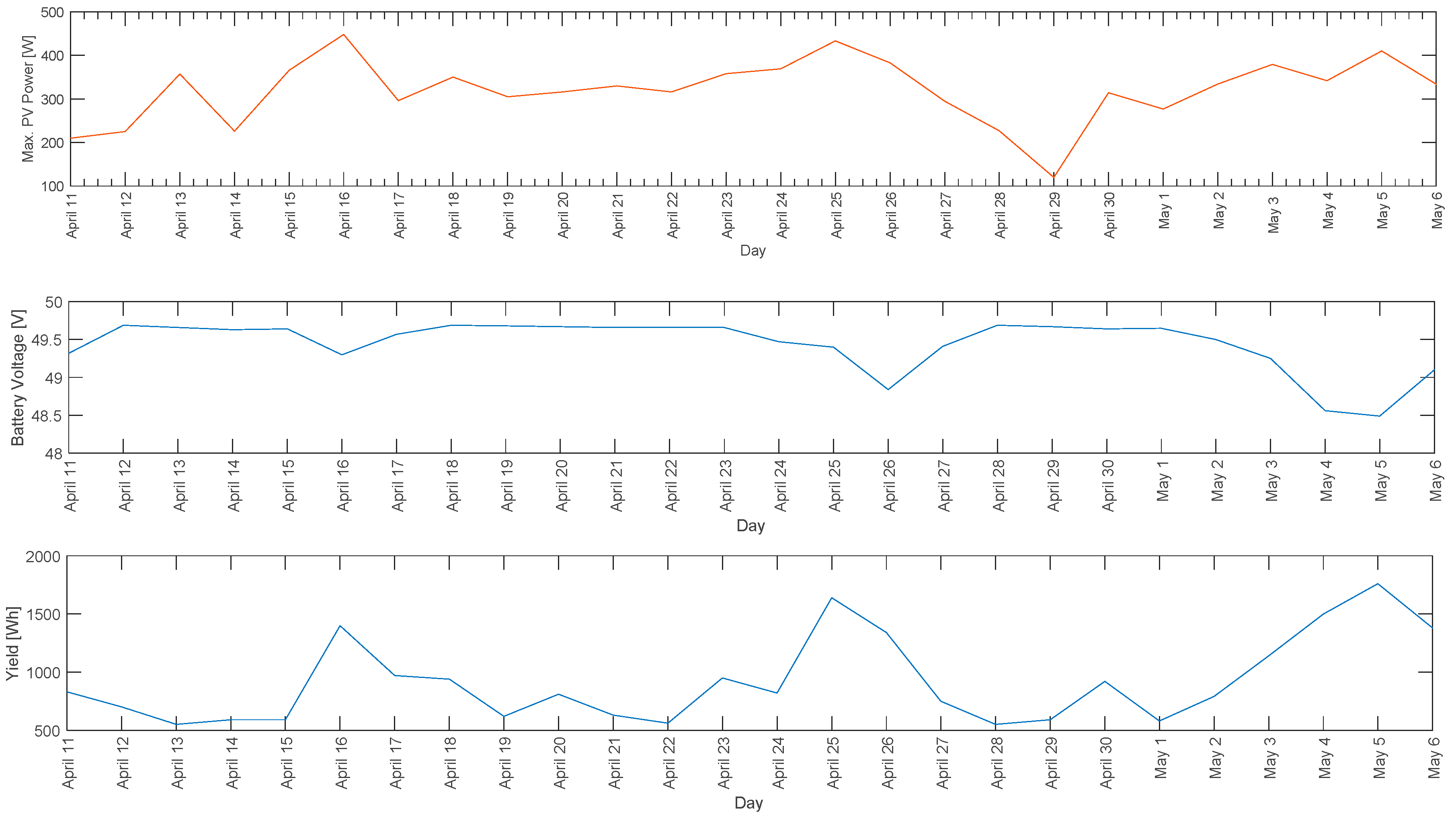
4.3. Charging Station for E-Bike Sharing Systems
5. Discussion
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Franco R., J.F. Air pollution in urban centers. Challenge to achieve sustainability: Case study Bogota City. Rev. EAN 2012, 72, 193–204. Available online: https://journal.universidadean.edu.co/index.php/Revista/article/view/576 (accessed on 12 November 2018).
- Otero, I.; Nieuwenhuijsen, M.J.; Rojas-Rueda, D. Health impacts of bike sharing systems in Europe. Environ. Int. 2018, 115, 387–394. [Google Scholar] [CrossRef] [PubMed]
- Paul, F.; Bogenberger, K. Evaluation-Method for a Station Based Urban-Pedelec Sharing System. Transp. Res. Procedia 2014, 4, 482–493. [Google Scholar] [CrossRef]
- Colombian Congress. National Law 1715 of Mai 13th of 2014 issued by Colombian congress, by means of which is regulated the integration of non-conventional renewable energies to the National Energy System. Official Journal of the Republic of Colombia 2014, 49.150, 1–9, ISSN 0122-2112. Available online: https://goo.gl/b8LUCp (accessed on 19 November 2018).
- Colombian Congress. National Law 697 of October 3rd of 2001, issued by Colombian Congress, which promotes the rational and efficient use of energy, promotes the use of alternative energies and dictates other provisions. Official Journal of the Republic of Colombia 2001, 44.573, 1–3, ISSN 0122-2112. Available online: https://goo.gl/XgV7He (accessed on 19 November 2018).
- Kiefer, C.; Behrendt, F. Smart e-bike monitoring system: Real-time open source and open hardware GPS assistance and sensor data for electrically-assisted bicycles. IET Intell. Transp. Syst. 2016, 10, 79–88. [Google Scholar] [CrossRef]
- Regulation (EU) No 168/2013 of the European Parliament and of the Council of 15 January 2013 on the approval and market surveillance of two- or three-wheel vehicles and quadricycles. Official Journal of the European Communities 2013, 56, 52–128, ISSN 1977-0677. Available online: https://eur-lex.europa.eu/legal-content/en/TXT/?uri=CELEX:32013R0168 (accessed on 12 November 2018).
- Ministry of Colombian Public Transportation. Resolution Number 160, Ministry of Colombian Public Transportation. Official Journal of the Republic of Colombia 2017, 50.135, 6–9, ISSN 0122-2112. Available online: https://goo.gl/q2ex9r (accessed on 19 November 2018).
- Morchin, W.C.; Oman, H. Electric Bicycles: A Guide to Design and Use, 1st ed.; Wiley-IEEE Press: Hoboken, NJ, USA, 2005. [Google Scholar]
- Chlebosz, W.; Ombach, G.; Junak, J. Comparison of permanent magnet brushless motor with outer and inner rotor used in e-bike. In Proceedings of the 2010 XIX International Conference on Electrical Machines (ICEM), Rome, Italy, 6–8 September 2010; pp. 1–5. [Google Scholar]
- Diga, N.; Ivanov, S.; Diga, S.-M.; Ivanov, V. Considerations on Design and Control Modelling of Permanent Magnet Synchronous Motors for Driving Electric Bicycles. Ann. Univ. Craiova 2013, 37, 16–21. [Google Scholar]
- Texas Instruments. InstaSPIN-FOC™ and InstaSPIN-MOTION™ User’s Guide; Texas Instruments: Dallas, TX, USA, 2017. [Google Scholar]
- Bindra, A. Wide-Bandgap Power Devices Are Changing the Power Game. IEEE Power Electron. Mag. 2015, 2, 4–6. [Google Scholar] [CrossRef]
- Thomas, D.; Klonari, V.; Vallée, F.; Ioakimidis, C.S. Implementation of an e-bike sharing system: The effect on low voltage network using pv and smart charging stations. In Proceedings of the 2015 International Conference on Renewable Energy Research and Applications (ICRERA), Palermo, Italy, 22–25 November 2015; pp. 572–577. [Google Scholar]
- Texas Instruments. Test Report of MPPT Charge Controller PMP 7605; Texas Instruments: Dallas, TX, USA, 2013. [Google Scholar]
- Reddy, T.B. Linden’s Handbook of Batteries, 4th ed.; McGraw-Hill: New York, NY, USA, 2011. [Google Scholar]
- Turner, J. The Electric Bike Book; Oak Creek Publishing: Boulder, CO, USA, 2013. [Google Scholar]
- U.S. Environmental Protection Agency. Advancing Sustainable Materials Management: 2014 Fact Sheet; U.S. Environmental Protection Agency (EPA): Washington, DC, USA, 2016. Available online: https://www.epa.gov/sites/production/files/2016-11/documents/2014_smmfactsheet_508.pdf (accessed on 13 November 2018).
- SmithBucklin Statistics Group. National Recycling Rate Study; Battery Council International (BCI): Chicago, IL, USA, 2017; Available online: https://cdn.ymaws.com/batterycouncil.org/resource/resmgr/Recycling_Rate/BCI_201212-17_FinalRecycling.pdf (accessed on 13 November 2018).
- García Salvatierra, A. The Internet of Things and the New Risks for Privacy. Master’s Thesis, E.U.I.T. Telecomunicación (UPM), Madrid, Spain, 2012. [Google Scholar]
- Mattern, F.; Floerkemeier, C. From the internet of computers to the internet of things. In From Active Data Management to Event-Based Systems and More; Springer: Berlin, Germany, 2010; pp. 242–259. [Google Scholar]
- O’Leary, D.E. ‘Big Data’, the ‘Internet of Things’ and the ‘Internet of Signs’. Int. J. Intell. Syst. Acc. Financ. Manag. 2013, 20, 53–65. [Google Scholar] [CrossRef]
- Aguiari, D.; Delnevo, G.; Monti, L.; Ghini, V.; Mirri, S.; Salomoni, P.; Pau, G.; Im, M.; Tse, R.; Ekpanyapong, M.; et al. Canarin II: Designing a smart e-bike eco-system. In Proceedings of the 2018 15th IEEE Annual Consumer Communications & Networking Conference (CCNC), Las Vegas, NV, USA, 12–15 January 2018; pp. 1–6. [Google Scholar]
- Zhao, Y.; Chen, L.; Teng, C.; Li, S.; Pan, G. GreenBicycling: A smartphone-based public bicycle sharing system for healthy life. In Proceedings of the 2013 IEEE and Internet of Things (iThings/CPSCom) and IEEE International Conference on and IEEE Cyber, Physical and Social Computing, Beijing, China, 20–23 August 2013; pp. 1335–1340. [Google Scholar]
- Kaltenbrunner, A.; Meza, R.; Grivolla, J.; Codina, J.; Banchs, R. Urban cycles and mobility patterns: Exploring and predicting trends in a bicycle-based public transport system. Pervasive Mob. Comput. 2010, 6, 455–466. [Google Scholar] [CrossRef]
- Joo, S.; Oh, C.; Jeong, E.; Lee, G. Categorizing bicycling environments using GPS-based public bicycle velocity data. Transp. Res. Part C Emerg. Technol. 2015, 56, 239–250. [Google Scholar] [CrossRef]
- Dozza, M.; Piccinini, G.F.B.; Werneke, J. Using naturalistic data to assess e-cyclist behavior. Transp. Res. Part F Traffic Psychol. Behav. 2016, 41, 217–226. [Google Scholar] [CrossRef]
- O’Brien, O.; Cheshire, J.; Batty, M. Mining bicycle sharing data for generating insights into sustainable transport systems. J. Transp. Geogr. 2014, 34, 262–273. [Google Scholar] [CrossRef]
- Jäppinen, S.; Toivonen, T.; Salonen, M. Modelling the potential effect of shared bicycles on public transport travel times in Greater Helsinki: An open data approach. Appl. Geogr. 2013, 43, 13–24. [Google Scholar] [CrossRef]
- Griffin, G.P.; Jiao, J. Where does Bicycling for Health Happen? Analysing Volunteered Geographic Information through Place and Plexus. J. Transp. Health 2015, 2, 238–247. [Google Scholar] [CrossRef]
- Navarro, K.F.; Gay, V.; Golliard, L.; Johnston, B.; Leijdekkers, P.; Vaughan, E.; Wang, X.; Williams, M.A. SocialCycle: What can a mobile app do to encourage cycling? In Proceedings of the 38th IEEE Conference on Local Computer Networks (LCN 2013), Sydney, Australia, 21–24 October 2013; pp. 24–30. [Google Scholar]
- Zeng, J.; Li, M.; Liang, J. An Anti-theft Electric Bicycle Tracking System Supporting Large-Scale Users. In Proceedings of the 2014 International Conference on Identification, Information and Knowledge in the Internet of Things, Beijing, China, 17–18 October 2014; pp. 9–16. [Google Scholar]
- Iannuzzi, D.; D’Ostilio, R. Inductive charging station for Ebike Clever Mobility: A research project. In Proceedings of the AEIT Annual Conference—From Research to Industry: The Need for a More Effective Technology Transfer (AEIT), Trieste, Italy, 18–19 September 2014; pp. 1–4. [Google Scholar]
- Veneri, O.; Capasso, C.; Iannuzzi, D. Experimental evaluation of DC charging architecture for fully-electrified low-power two-wheeler. Appl. Energy 2016, 162, 1428–1438. [Google Scholar] [CrossRef]
- Zhang, X.; Mao, W.; Long, Z.; Tang, Z.; Li, Z.; Zheng, X.; Ding, Y.; Tang, C. Electric Bike Management Method and System. CN Patent CN104240031A, 24 December 2014. [Google Scholar]
- Tîtu, A.M.; Oprean, C.; Bondrea, I.; Carabulea, I.; Marginean, I.; Moldovan, A.M.; Bogorin-Predescu, A.; Iuonas, I.D. Bicycle with Accentuated Energy Recovery System. EU Patent RO129293A0, 28 March 2014. [Google Scholar]
- Turner, J.R. Electric Bicycle and Methods. US Patent US6629574B2, 7 October 2003. [Google Scholar]
- Tang, M.; Zhang, B. Intelligent Power Assisting Device of Electric Bicycle. CN Patent CN203186536U, 11 September 2013. [Google Scholar]
- Fisher, P. High Performance Brushless DC Motor Control; School of Engineering and Technology CQUniversity Australia: Rockhampton, Australia, 2014. [Google Scholar]
- Gamazo-Real, J.C.; Vázquez-Sánchez, E.; Gómez-Gil, J. Position and Speed Control of Brushless DC Motors Using Sensorless Techniques and Application Trends. Sensors 2010, 10, 6901–6947. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Anaheim Automation. BLY34–Brushless DC Motors Specifications Sheet; Anaheim Automation: Anaheim, CA, USA, 2010. [Google Scholar]
- Schleinitz, K.; Petzoldt, T.; Franke-Bartholdt, L.; Krems, J.; Gehlert, T. The German naturalistic cycling study—Comparing cycling speed of riders of different e-bikes and conventional bicycles. Saf. Sci. 2017, 92, 290–297. [Google Scholar] [CrossRef]
- Seyedmahmoudian, M.; Mekhilef, S.; Rah-mani, R.; Yusof, R.; Renani, E.T. Analytical modeling of partially shaded photovoltaic systems. Energies 2013, 6, 128–144. [Google Scholar] [CrossRef] [Green Version]
- Ishaque, K.; Salam, Z. A review of maximum power point tracking techniques of PV system for uniform insolation and partial shading condition. Renew. Sustain. Energy Rev. 2013, 19, 475–488. [Google Scholar] [CrossRef]
- Devy, M.; Boizard, J.L.; Galeano, D.B.; Lindado, H.C.; Manzano, M.I.; Irki, Z.; Naoulou, A.; Lacroix, P.; Fillatreau, P.; Fourniols, J.Y.; et al. Stereovision Algorithm to be Executed at 100Hz on a FPGA-Based Architecture. In Advances in Theory and Applications of Stereo Vision; Bhatti, A., Ed.; IntechOpen: London, UK, 2010; p. 17. [Google Scholar]
- Carrillo, H.; Latif, Y.; Neira, J.; Castellanos, J.A. Place categorization using sparse and redundant representations. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 4950–4957. [Google Scholar]

































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (t) | (2) | |
| (t) | (3) | |
| (t) | (4) | |
| (t) | (5) | |
| (t) | (6) |
| Symbol | Description | Value |
|---|---|---|
| Air density | 0.8962 kg/m3 | |
| Drag coefficient | 1 | |
| Frontal area (bike and cyclist) | 0.504 m2 | |
| Coefficient of rolling resistance | 0.0032 | |
| Gravitational acceleration | 9.81 m/s2 | |
| 1st coefficient of wheel bearing | 0.091 N | |
| 2nd coefficient of wheel bearing | 0.0087 N s/m | |
| Wheel moment of inertia | 0.14 kg m2 | |
| Power measurement period | 1 s | |
| Bicycle velocity relative to air | 0 m/s2 |
| Symbol | Description | Sensor—Method |
|---|---|---|
| Bicycle ground velocity | Reed switch sensor (m/s) | |
| Road—gravity vector angle | GPS unit output based (°) | |
| Bike and cyclist mass | Body and hanging scales (kg) | |
| Wheel radius | Class 2 tape measure (m) | |
| Bicycle linear acceleration | value based computation (m/s2) |
| Motor Reference | Motor Model Parameters | Controller Constants | ||
|---|---|---|---|---|
| Rs (Ω) | Ls (μH) | Ki | Kp | |
| BLY342S-48V-3200 | 0.197 | 521.49 | ||
| MTO 5065-170-HA-C | 0.091 | 50.80 | ||
| Perturbed Parameter | Settling Time (s) |
|---|---|
| Motor load | 0.3 |
| Frequency | 0.2 |
| Reference amplitude | 0.15 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Florez, D.; Carrillo, H.; Gonzalez, R.; Herrera, M.; Hurtado-Velasco, R.; Cano, M.; Roa, S.; Manrique, T. Development of a Bike-Sharing System Based on Pedal-Assisted Electric Bicycles for Bogota City. Electronics 2018, 7, 337. https://doi.org/10.3390/electronics7110337
Florez D, Carrillo H, Gonzalez R, Herrera M, Hurtado-Velasco R, Cano M, Roa S, Manrique T. Development of a Bike-Sharing System Based on Pedal-Assisted Electric Bicycles for Bogota City. Electronics. 2018; 7(11):337. https://doi.org/10.3390/electronics7110337
Chicago/Turabian StyleFlorez, David, Henry Carrillo, Ricardo Gonzalez, Max Herrera, Ronald Hurtado-Velasco, Martha Cano, Sergio Roa, and Tatiana Manrique. 2018. "Development of a Bike-Sharing System Based on Pedal-Assisted Electric Bicycles for Bogota City" Electronics 7, no. 11: 337. https://doi.org/10.3390/electronics7110337