
Categorizing Active Marine Acoustic Sources Based on Their Potential to Affect Marine Animals
 ,
,
Abstract
:1. Introduction
2. Background
2.1. Characterizing Marine Sound
2.2. U.S. Regulatory Framework on Active Marine Sound Sources
2.3. Marine Acoustic Sources
2.3.1. Airguns
2.3.2. High-Resolution Geophysical Sources
2.3.3. Oceanographic Acoustic Instrumentation
2.3.4. Communication/Tracking Acoustic Sources
3. Results: Categorizing Acoustic Sources Based on Critical Factors
3.1. Airgun Categories
3.2. Categorization of Non-Airgun, Non-Continuous Marine Acoustic Sources
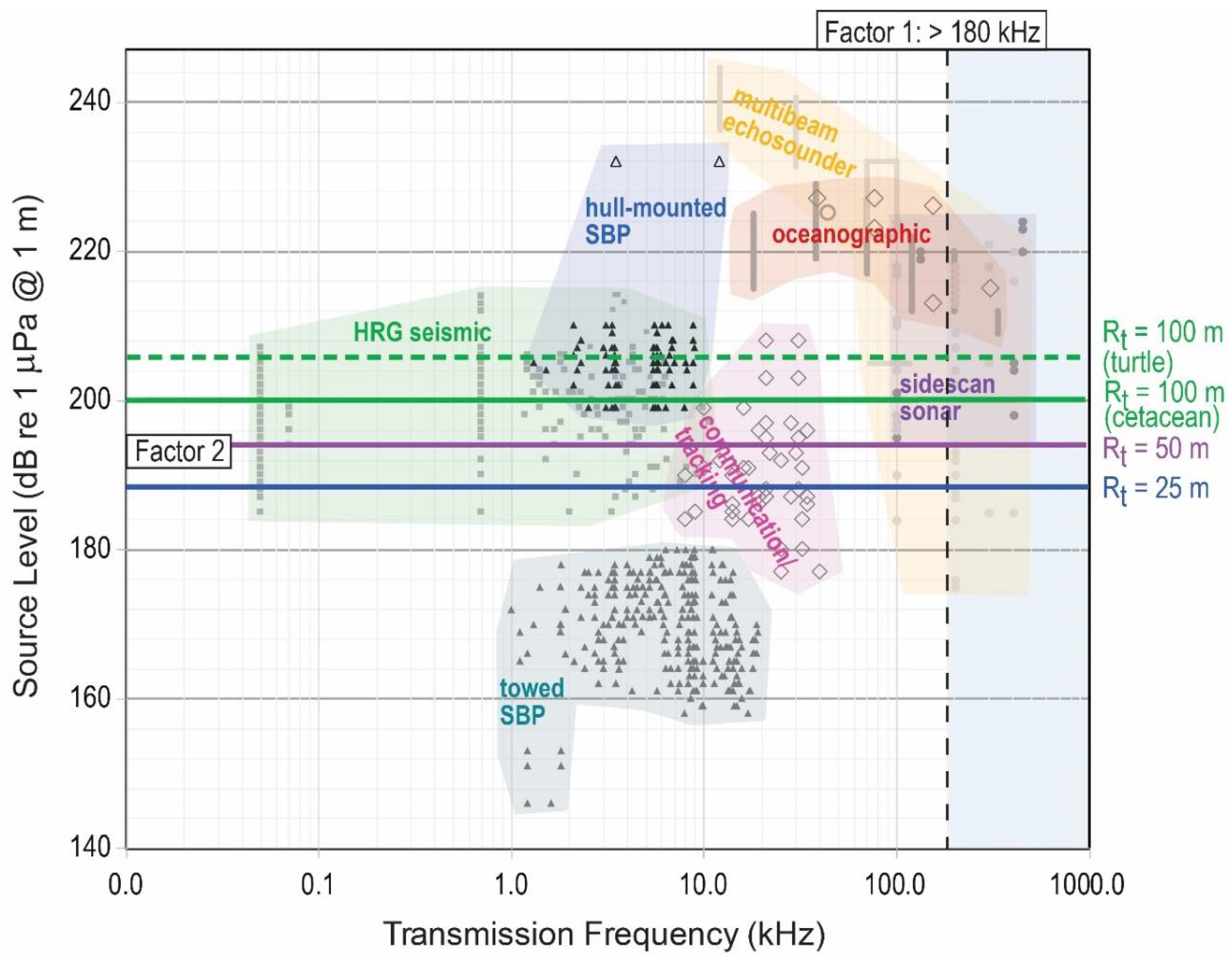
3.3. Factors for Evaluating Non-Airgun Acoustic Sources
3.3.1. Factor 1: Inaudible Frequencies
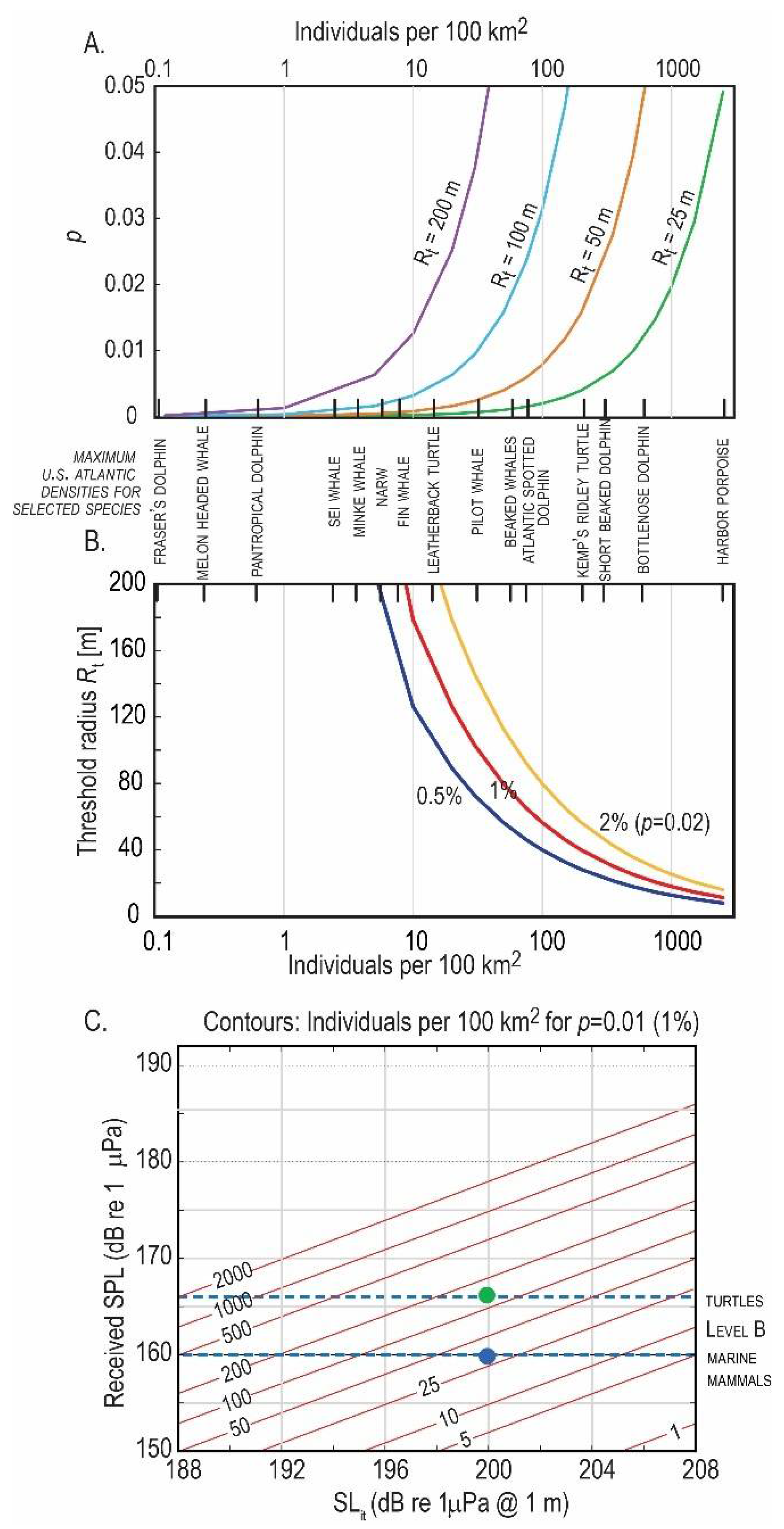
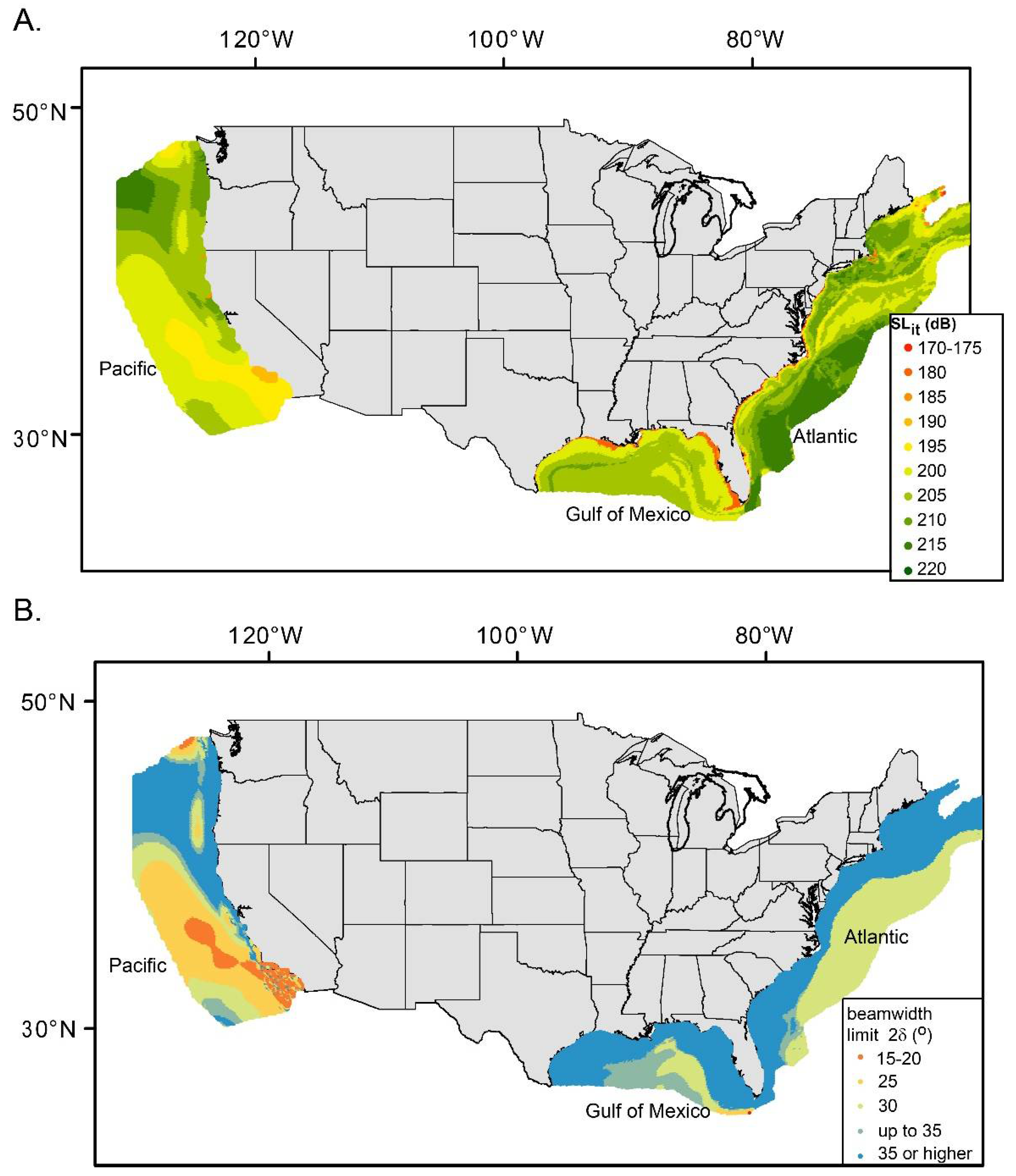
3.3.2. Factor 2: Received SPL less Than 160 dB re 1 μPa
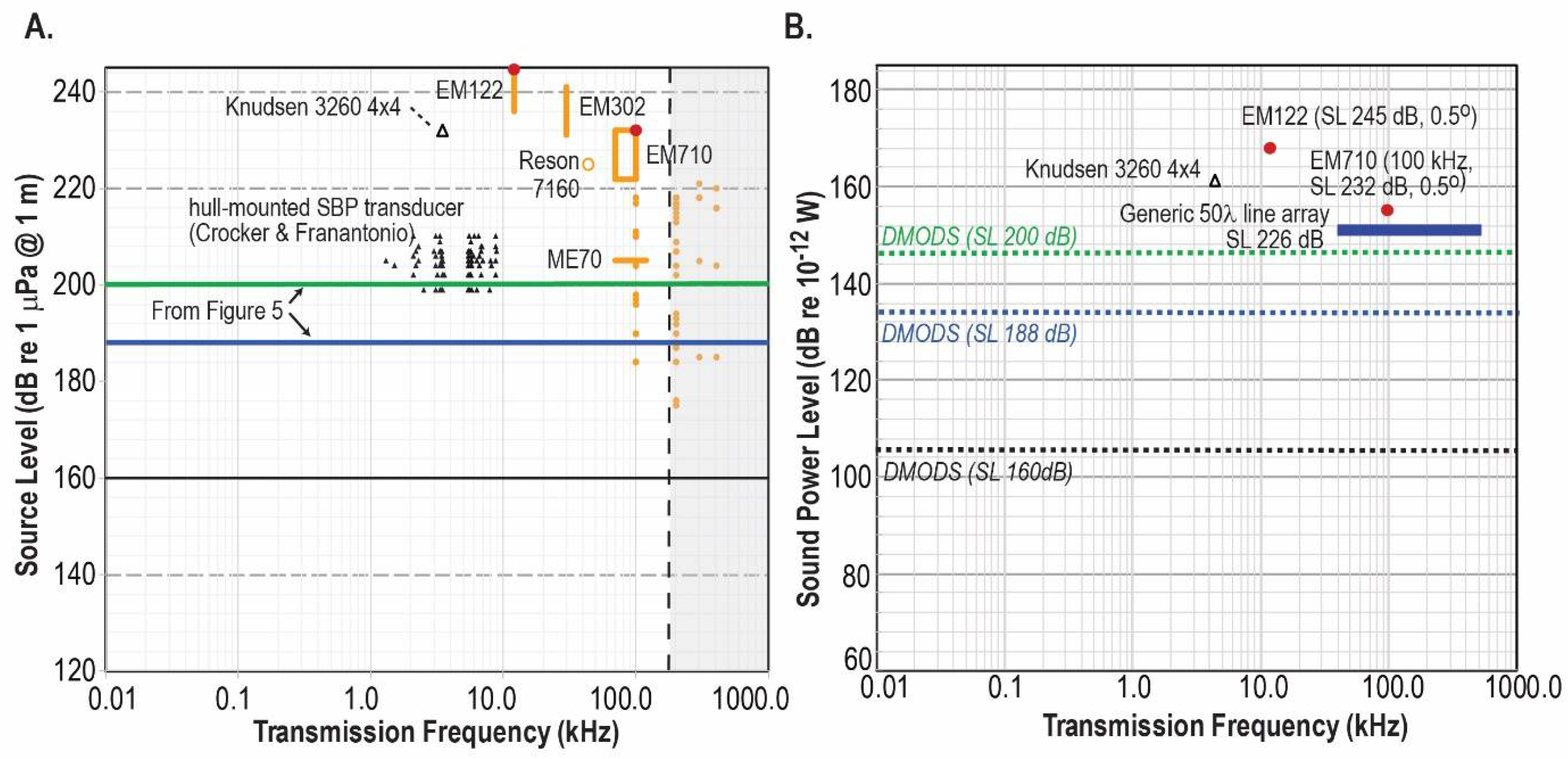
3.3.3. Factor 3: Sound Power Level (Radiated Power)
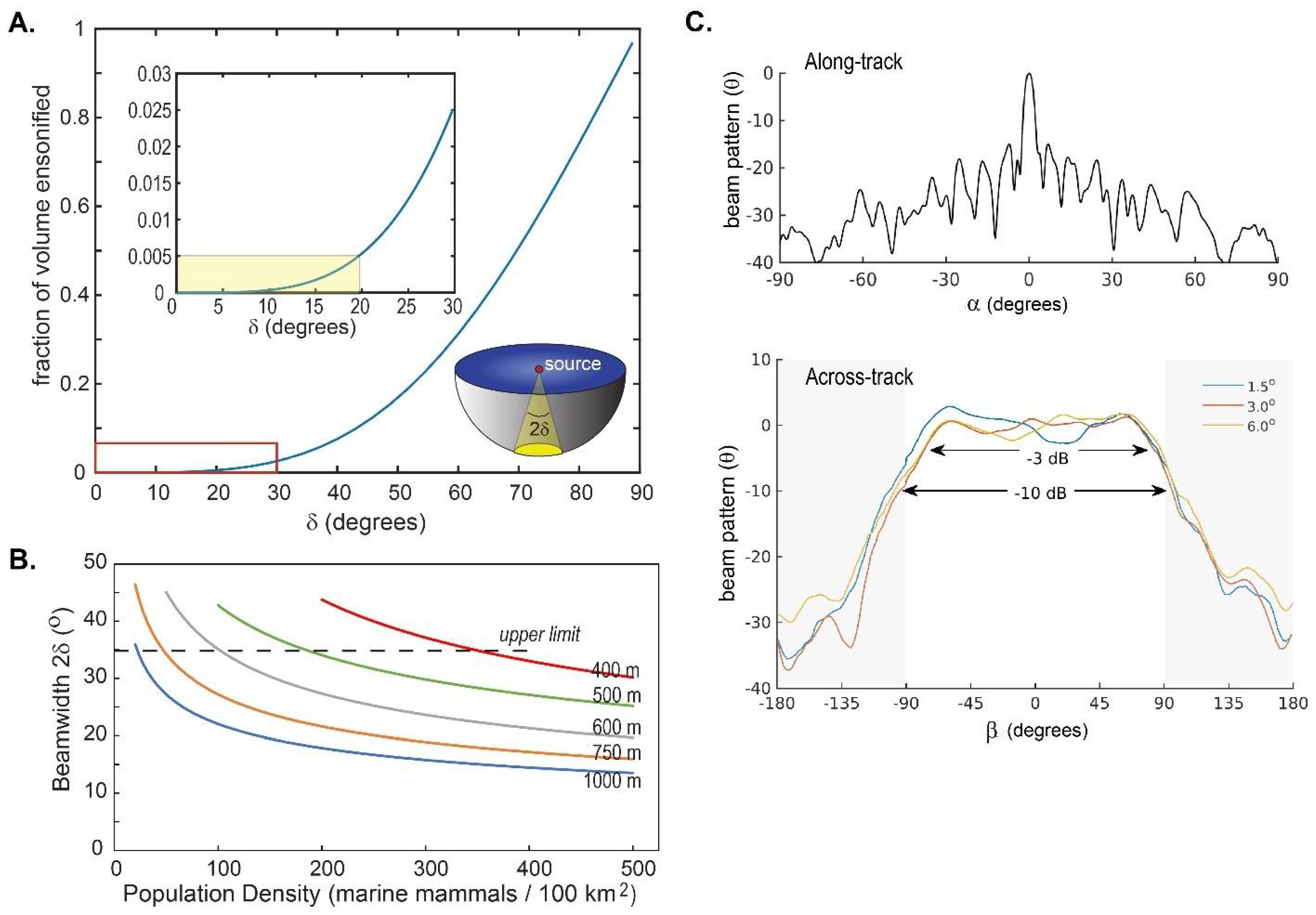
3.3.4. Factor 4: Beamwidth
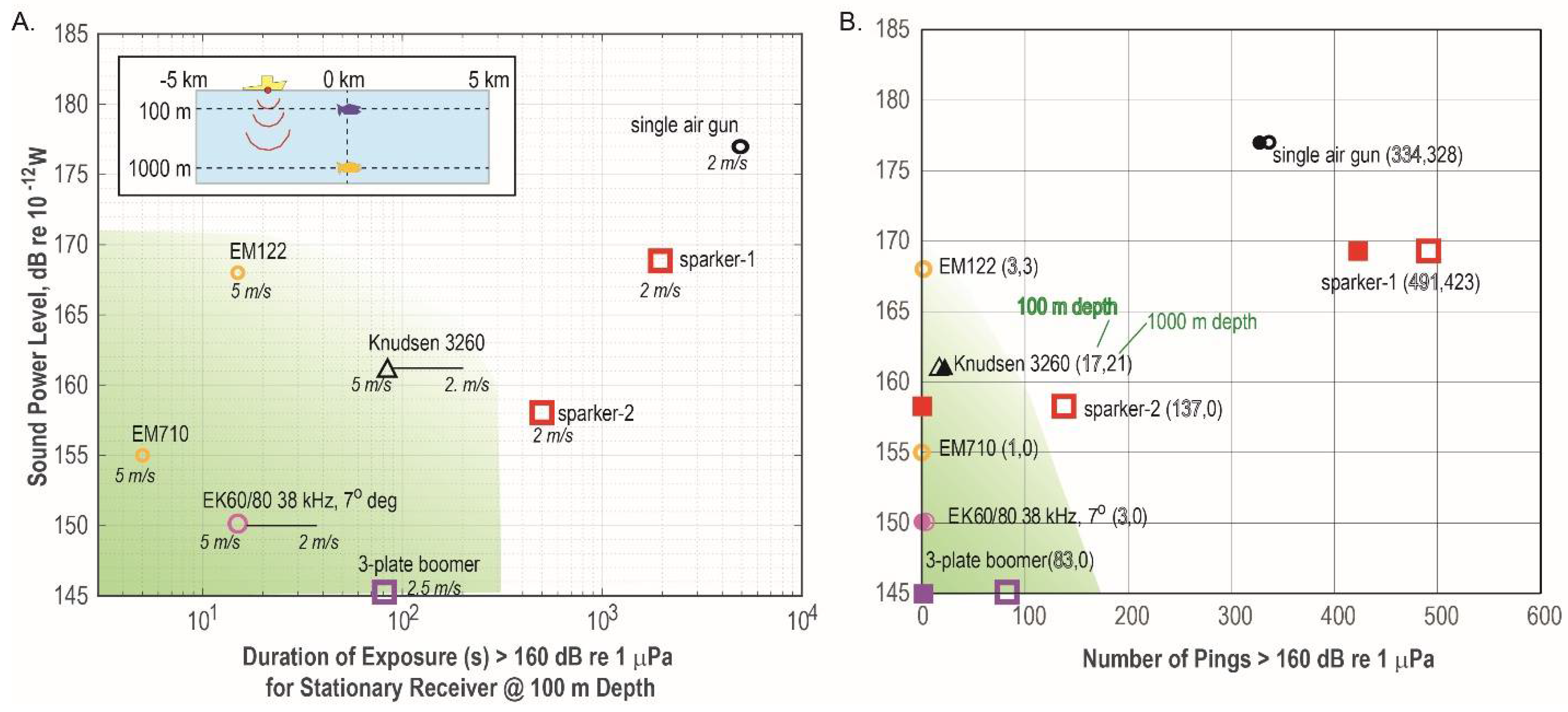
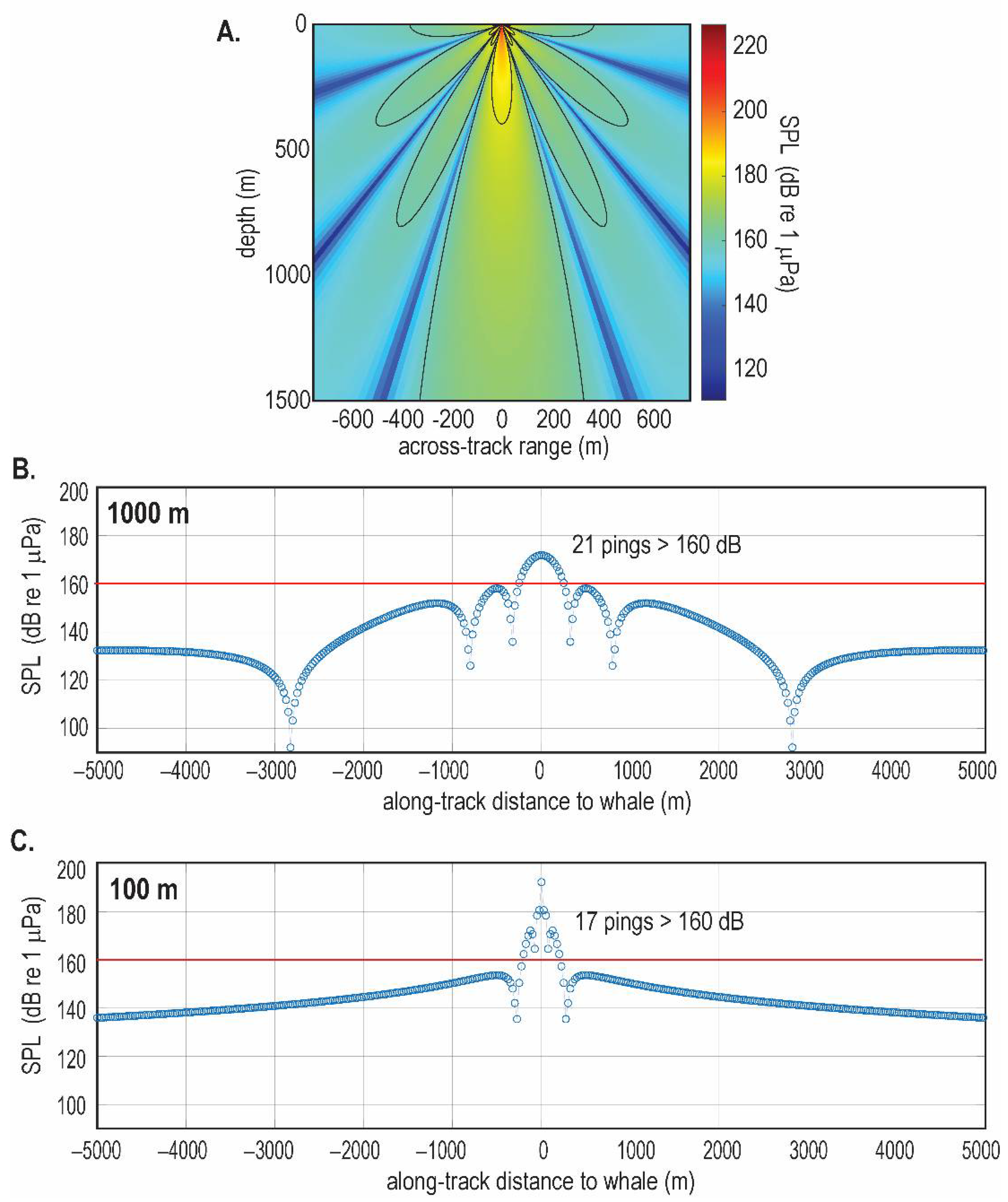
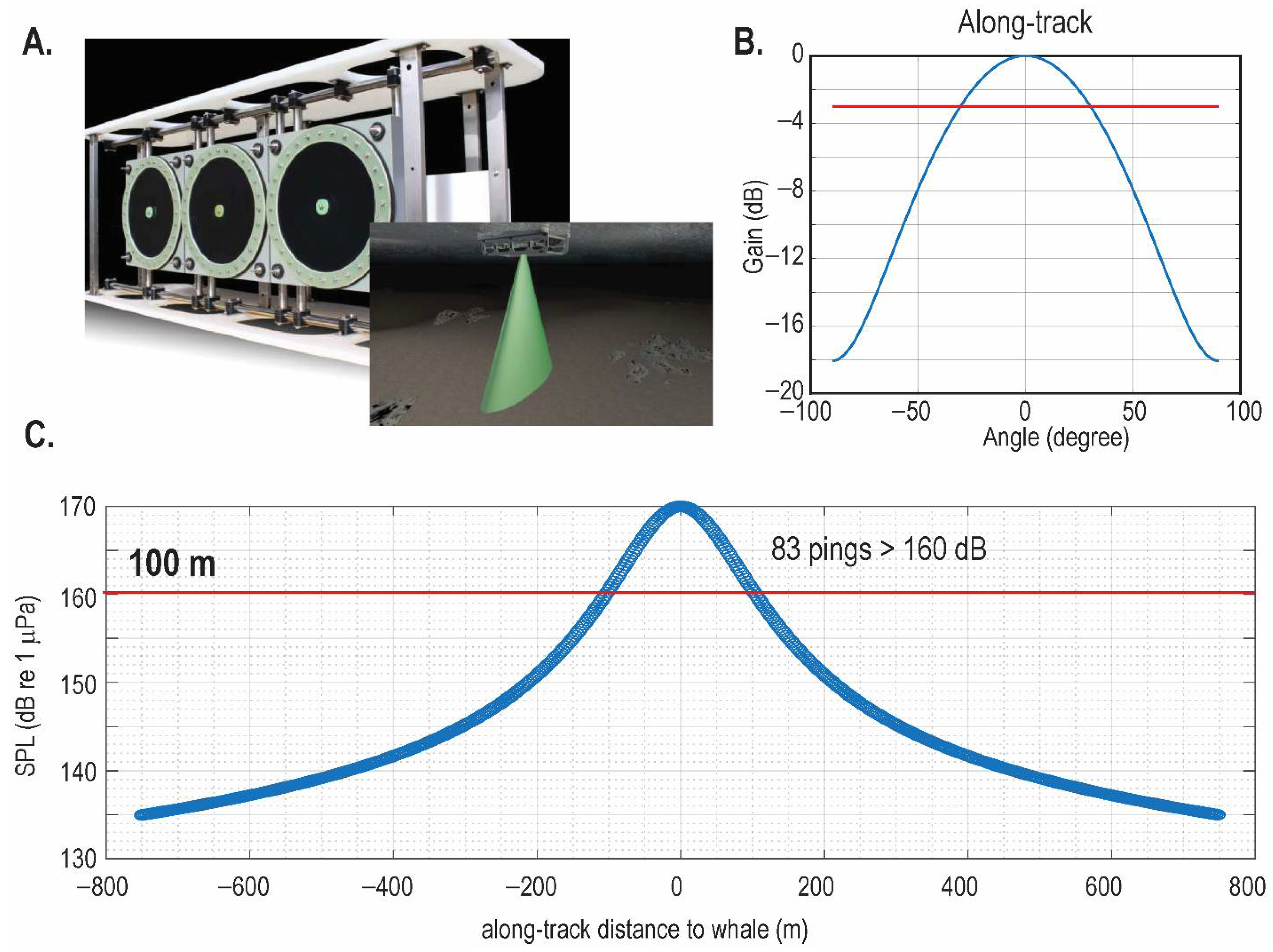
3.3.5. Factor 5: Degree of Exposure
3.4. Uncategorized Sources
4. Discussion
4.1. Tiering of Marine Acoustic Sources
4.2. Multiple Acoustic Sources Used Simultaneously
4.3. Behavioral Considerations
4.4. Intermittency
4.5. Auditory Integration Time
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Southall, B.L.; Nowacek, D.P.; Bowles, A.E.; Senigaglia, V.; Bejder, L.; Tyack, P.L. Marine Mammal Noise Exposure Criteria: Assessing the Severity of Marine Mammal Behavioral Responses to Human Noise. Aquat. Mamm. 2021, 47, 421–464. [Google Scholar] [CrossRef]
- Clay, C.S.; Medwin, H. Acoustical Oceanography: Principles and Applications; Wiley: Taipei, Taiwan, 1979; p. 576. [Google Scholar]
- Kinsler, L.E.; Frey, A.R.; Coppens, A.B.; Sanders, J.V. Fundamentals of Acoustics, 4th ed.; Wiley-VCH: Hoboken, NJ, USA, 1999; p. 560. [Google Scholar]
- Pierce, A.D. Acoustics: An Introduction to Its Physical Principles and Applications, 3rd ed.; Springer International: Cham, Switzerland, 2019; p. 768. [Google Scholar]
- Urick, R.J. Principles of Underwater Sound; Peninsula Publishing: Los Altos, CA, USA, 1983; p. 444. [Google Scholar]
- Lurton, X. An Introduction to Underwater Acoustics: Principles and Applications; Springer: London, UK, 2002; p. 777. [Google Scholar]
- International Organization for Standardization (ISO). ISO 18405:2017 Underwater Acoustics—Terminology; ISO: Geneva Switzerland, 2017; Available online: https://www.iso.org/standard/62406.html (accessed on 11 June 2020).
- Crocker, S.E.; Fratantonio, F.D. Characteristics of Sounds Emitted During High-Resolution Geophysical Surveys; NUWC-NPT Technical Report 12203; Naval Undersea Warfare Center Division-Newport: Newport, RI, USA, 2016; p. 266. Available online: https://apps.dtic.mil/sti/pdfs/AD1007504.pdf (accessed on 27 September 2020).
- Applied Acoustics Engineering Ltd. High Power Sparker Systems. 2013. Available online: https://www.subseatechnologies.com/media/files/files/b38eaa45/delta-sparker-brochure.pdf (accessed on 21 July 2021).
- Feltham, A.; Girard, M.; Jenkerson, M.; Nechayuk, V.; Griswold, S.; Henderson, N.; Johnson, G. The Marine Vibrator Joint Industry Project: Four years on. Explor. Geophys. 2018, 49, 675–687. [Google Scholar] [CrossRef]
- National Marine Fisheries Service (NMFS). Takes of Marine Mammals Incidental to Specified Activities; Taking Marine Mammals Incidental to Site Characterization Surveys of Lease Areas. Fed. Regist. 2019, 84, 52464–52488. Available online: https://www.federalregister.gov/documents/2019/10/02/2019-21458/takes-of-marine-mammals-incidental-to-specified-activities-taking-marine-mammals-incidental-to-site (accessed on 23 February 2021).
- GEO Marine Survey Systems. Mega-Spark 20–40 kJ. 2020. Available online: https://www.geomarinesurveysystems.com/downloads/brochures/Geo-Spark_20-40kJ.pdf (accessed on 22 February 2021).
- National Marine Fisheries Service (NMFS). Takes of Marine Mammals Incidental to Specified Activities; Taking Marine Mammals Incidental to Marine Site Characterization Surveys Off of Delaware and Maryland. Fed. Regist. 2019, 84, 66156–66175. Available online: https://www.federalregister.gov/documents/2019/12/03/2019-26091/takes-of-marine-mammals-incidental-to-specified-activities-taking-marine-mammals-incidental-to (accessed on 23 February 2021).
- Kongsberg. TOPAS PS18. 2019. Available online: https://www.kongsberg.com/globalassets/maritime/km-products/product-documents/topas-ps-18-parametric-sub-bottom-profiler.pdf (accessed on 10 February 2021).
- Innomar. Products. Available online: https://www.innomar.com/products.php (accessed on 10 February 2021).
- National Ocean Service. Final Programmatic Environmental Assessment for the Office of Coast Survey Hydrographic Survey Projects; National Oceanic and Atmospheric Administration: Silver Spring, MD, USA, 2013; p. 128. Available online: https://nauticalcharts.noaa.gov/about/docs/regulations-and-policies/2013-18-nepa-ocs-final-pea.pdf (accessed on 24 February 2021).
- Southall, B.L.; Bowles, A.; Ellison, W.; Finneran, J.J.; Gentry, R.L.; Green, C.R.; Kastak, C.R.; Ketten, D.; Miller, J.; Nachtigall, P.; et al. Marine mammal noise exposure criteria. Aquat. Mamm. 2007, 33, 411–414. [Google Scholar] [CrossRef]
- National Marine Fisheries Service (NMFS). 2018 Revision to: Technical Guidance for Assessing the Effects of Anthropogenic Sound on Marine Mammal Hearing (Version 2.0): Underwater Thresholds for Onset of Permanent and Temporary Threshold Shifts, NOAA Technical Memorandum, NMFS-OPR-59; National Oceanic and Atmospheric Administration (NOAA): Washington, DC, USA, 2018; p. 167. Available online: https://media.fisheries.noaa.gov/dam-migration/tech_memo_acoustic_guidance_%2820%29_%28pdf%29_508.pdf (accessed on 21 December 2019).
- National Marine Fisheries Service (NMFS). Endangered Fish and Wildlife; Notice of Intent to Prepare an Environmental Impact Statement. Fed. Regist. 2005, 70, 1871–1875. Available online: https://www.federalregister.gov/documents/2005/01/11/05-525/endangered-fish-and-wildlife-notice-of-intent-to-prepare-an-environmental-impact-statement (accessed on 24 June 2022).
- National Marine Fisheries Service (NMFS). Takes of Marine Mammals Incidental to Specified Activities; Low-Energy Marine Geophysical Survey in the Dumont d’Urville Sea Off the Coast of East Antarctica, January to March 2013. Fed. Regist. 2014, 79, 463–497. Available online: https://www.federalregister.gov/documents/2014/01/03/2013-31471/takes-of-marine-mammals-incidental-to-specified-activities-low-energy-marine-geophysical-survey-in (accessed on 24 June 2022).
- Tyack, P.L.; Zimmer, W.M.X.; Moretti, D.; Southall, B.L.; Claridge, D.E.; Durban, J.W.; Clark, C.W.; D’Amico, A.; DiMarzio, N.; Jarvis, S.; et al. Beaked Whales Respond to Simulated and Actual Navy Sonar. PLoS ONE 2011, 6, e17009. [Google Scholar] [CrossRef]
- RD Instruments. ADCP Beam Clearance Area, Teledyne Application Note FSA-019; Teledyne RDI: San Diego, CA, USA, 2002; p. 8. Available online: http://www.teledynemarine.com/Documents/Brand%20Support/RD%20INSTRUMENTS/Technical%20Resources/Technical%20Notes/ChannelMaster/FSA019.PDF (accessed on 15 October 2020).
- Simrad. EK80 Wide Band Scientific Echo Sounder: Installation Manual, 394149/D. 2020. Available online: https://www.simrad.online/ek80/ins/ek80_ins_en_us.pdf (accessed on 3 September 2021).
- Richardson, W.J.; Greene, C.R.; Malme, C.I.; Thomson, D.H. Chapter 6—Man Made Noise. In Marine Mammals and Noise; Richardson, W.J., Greene, C.R., Malme, C.I., Thomson, D.H., Eds.; Academic Press: San Diego, CA, USA, 1995; pp. 101–158. [Google Scholar]
- National Science Foundation (NSF); U.S. Geological Survey (USGS). Final Programmatic Environmental Impact Statement/Overseas Environmental Impact statement for Marine Seismic Research funded by the National Science Foundation or conducted by the U.S. Geological Survey; National Science Foundation (NSF): U.S. Geological Survey (USGS): Arlington, VA, USA; Reston, VA, USA, 2011; p. 981. Available online: https://www.nsf.gov/geo/oce/envcomp/usgs-nsf-marine-seismic-research/nsf-usgs-final-eis-oeis_3june2011.pdf (accessed on 3 April 2013).
- International Association of Geophysical Contractors (IAGC). Lowest Practicable Source Levels (LPSL): The Implications of Adjusting Seismic Source Array Parameters. 2014. Available online: https://iagc.org/wp-content/uploads/2020/07/IAGC-Working-Paper-Lowest-Practicable-Source-Level-Dec-2014.pdf (accessed on 10 November 2014).
- Farmer, P.; Miller, D.; Pieprzak, A.; Rutledge, J.; Woods, R. Exploring the Subsalt. Oilfield Rev. 1996, 8, 50–64. [Google Scholar]
- Holbrook, W.S.; Reiter, E.C.; Purdy, G.M.; Toksöz, M.N. Image of the Moho across the continent-ocean transition, U.S. east coast. Geology 1992, 20, 203–206. [Google Scholar] [CrossRef]
- Kent, G.M.; Singh, S.C.; Harding, A.J.; Sinha, M.C.; Orcutt, J.A.; Barton, P.J.; White, R.S.; Bazin, S.; Hobbs, R.W.; Tong, C.H.; et al. Evidence from three-dimensional seismic reflectivity images for enhanced melt supply beneath mid-ocean ridge discontinuities. Nature 2000, 406, 614–618. [Google Scholar] [CrossRef] [PubMed]
- Keen, C.E.; de Voogd, B. The continent-ocean boundary at the rifted margin off eastern Canada: New results from deep seismic reflection studies. Tectonics 1988, 7, 107–124. [Google Scholar] [CrossRef]
- Dragoset, W.H. Air-gun array specs: A tutorial. Lead. Edge 1990, 9, 24–32. [Google Scholar] [CrossRef]
- Caldwell, J.; Dragoset, W. A brief overview of seismic air-gun arrays. Geophysics 2000, 19, 898–902. [Google Scholar] [CrossRef]
- Lawrence, M.; Oxley, I.; Bates, C. Geophysical Techniques for Maritime Archaeological Surveys. In Proceedings of the Symposium on the Application of Geophysics to Engineering and Environmental Problems 2004, Colorado Springs, CO, USA, 22–26 February 2004. [Google Scholar] [CrossRef] [Green Version]
- Hill, P.R.; Barrie, J.V.; Kung, R.; Lintern, D.G.; Mullan, S.; Li, M.Z.; Shaw, J.; Stacey, C.D.; Todd, B.J. Geological and Geophysical Site Characterization for Marine Renewable Energy Development and Environmental Assessment; Technical Report No. EXPO3-2015; CSA Group: Toronto, ON, Canada, 2015; p. 131. [Google Scholar] [CrossRef]
- Foley, J.; Jennings, D.; Fonda, R.; Jacobson, J.; Miele, M. Improved capability, reliability, and productivity for underwater geophysical mapping of unexploded ordnance. In Proceedings of the OCEANS 2015—Genova, Genova, Italy, 18–21 May 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Williams, S.J.; Cichon, H.A. Geologic Assessments and Characterization of Marine sand Resources—Gulf of Mexico Region. In Proceedings of the 8th Symposium on Coastal and Ocean Management, New Orleans, LA, USA, 19–23 July 1993; Available online: http://pubs.er.usgs.gov/publication/70017792 (accessed on 21 October 2021).
- Guan, S.; Brookens, T.; Vignola, J. Use of Underwater Acoustics in Marine Conservation and Policy: Previous Advances, Current Status, and Future Needs. J. Mar. Sci. Eng. 2021, 9, 173. [Google Scholar] [CrossRef]
- Applied Acoustics Engineering Ltd. S-Boom System. 2020. Available online: https://www.aaetechnologiesgroup.com/wp-content/uploads/2021/02/S-Boom-%E2%80%93-Technical-Specification.pdf (accessed on 12 February 2021).
- Falmouth Scientific. HMS-620 Bubble Gun. 2019. Available online: https://www.falmouth.com/files/HMS-620BubbleGun.pdf (accessed on 11 February 2021).
- Falmouth Scientific. HMS-620LF Bubble Gun. 2020. Available online: https://www.falmouth.com/files/HMS-620LFLowFrequencyBubbleGun.pdf (accessed on 7 September 2022).
- Wunderlich, J.; Müller, S. High-resolution sub-bottom profiling using parametric acoustics. Int. Ocean. Syst. 2003, 7, 6–11. [Google Scholar]
- Demer, D.A.; Andersen, L.N.; Bassett, C.; Berger, L.; Chu, D.; Condiotty, J.; Cutter, G.R. 2016 USA–Norway EK80 Workshop Report: Evaluation of a Wideband Echosounder for Fisheries and Marine Ecosystem Science; ICES Cooperative Research Report No. 336; International Council for the Exploration of the Sea: Copenhagen, Denmark, 2017; p. 79. Available online: https://www.ices.dk/sites/pub/Publication%20Reports/Cooperative%20Research%20Report%20(CRR)/CRR336.pdf (accessed on 14 October 2020).
- Edgetech. Coastal Acoustic Transponder. Available online: https://www.edgetech.com/wp-content/uploads/2019/07/ETN-ET-5491-CAT-3_31_22-073013-1.pdf (accessed on 21 August 2022).
- Teledyne Marine. Teledyne Benthos Location and Recovery. Available online: http://www.teledynemarine.com/Lists/Downloads/Locator_Brochure_2015_lo.pdf (accessed on 21 August 2022).
- Applied Acoustics Engineering Ltd. Easytrak M-USBL, Model 2671. Available online: https://www.aaetechnologiesgroup.com/wp-content/uploads/2021/02/Easytrak-M-USBL-2671-%E2%80%93-Technical-Specification.pdf (accessed on 21 August 2022).
- Edgetech. Multibeacon, Model 4380 Transponder/Responder. Available online: https://www.edgetech.com/wp-content/uploads/2019/07/4830-Multibeacon091014.pdf (accessed on 21 August 2022).
- Sonardyne. Datasheet, HPT 50000/7000, Ultra-short baseline and telemetry receiver. Available online: https://www.sonardyne.com/wp-content/uploads/2021/06/Sonardyne_8142_HPT.pdf (accessed on 21 August 2022).
- Ellison, W.T.; Southall, B.L.; Clark, C.W.; Frankel, A.S. A New Context-Based Approach to Assess Marine Mammal Behavioral Responses to Anthropogenic Sounds. Conserv. Biol. 2012, 26, 21–28. [Google Scholar] [CrossRef]
- Gomez, C.; Lawson, J.W.; Wright, A.J.; Buren, A.D.; Tollit, D.; Lesage, V. A systematic review on the behavioural responses of wild marine mammals to noise: The disparity between science and policy. Can. J. Zool. 2016, 94, 801–819. [Google Scholar] [CrossRef]
- U.S. Navy (USN). Chapter 3 Affected Environment and Environmental Consequences. In Final Environmental Impact Statement/Overseas Environmental Impact Statement Atlantic Fleet Training and Testing; United States Department of the Navy: Washington, DC, USA, 2018; pp. 1–144. Available online: https://media.defense.gov/2020/May/13/2002299473/-1/-1/1/3.00%20AFTT%20FEIS%20AFFECTED%20EVIRIRONMENT%20AND%20ENVIRONMENTAL%20CONSEQUENCES.PDF (accessed on 9 October 2020).
- National Marine Fisheries Service (NMFS). Takes of Marine Mammals Incidental to Specified Activities; Taking Marine Mammals Incidental to Office of Naval Research Arctic Research Activities. Fed. Regist. 2019, 84, 37240–37262. Available online: https://www.federalregister.gov/documents/2019/07/31/2019-16318/takes-of-marine-mammals-incidental-to-specified-activities-taking-marine-mammals-incidental-to (accessed on 8 September 2021).
- Gisiner, R.C. Sound and marine seismic surveys. Acoust. Today 2016, 12, 10–18. [Google Scholar]
- Crocker, S.E.; Fratantonio, F.D.; Hart, P.E.; Foster, D.S.; O’Brien, T.F.; Labak, S. Measurement of Sounds Emitted by Certain High-Resolution Geophysical Survey Systems. IEEE J. Ocean. Eng. 2019, 44, 796–813. [Google Scholar] [CrossRef]
- National Marine Fisheries Service (NMFS). Takes of Marine Mammals Incidental to Specified Activities; Taking Marine Mammals Incidental to Marine Site Characterization Surveys Off of Massachusetts and Rhode Island. Fed. Regist. 2021, 86, 40469–40494. Available online: https://www.federalregister.gov/documents/2021/07/28/2021-16025/takes-of-marine-mammals-incidental-to-specified-activities-taking-marine-mammals-incidental-to (accessed on 14 September 2021).
- U.S. Fish and Wildlife Service (USFWS). Marine Mammals; Incidental Take during Specified Activities: Cook Inlet, Alaska. Fed. Regist. 2019, 84, 2–36. Available online: https://www.federalregister.gov/documents/2019/08/01/2019-16279/marine-mammals-incidental-take-during-specified-activities-cook-inlet-alaska (accessed on 14 September 2021).
- Marine Mammal Commission (MMC). Comment letter on: Equinor Wind application under Section 105(a)(5)(D) of the Marine Mammal Protection Act. 2020. Available online: https://www.mmc.gov/wp-content/uploads/20-07-13-Harrison-NMFS-Equinor-proposed-IHA-HRG-surveys-NJ-NY-CT-RI-MA.pdf (accessed on 31 March 2021).
- Kongsberg. EM122 Multibeam Echo Sounder: Product Description, Report 302440/E. 2011. Available online: https://epic.awi.de/id/eprint/45364/1/Kongsberg_302440ae_em122_product_description.pdf (accessed on 29 September 2020).
- Hammerstad, E. EM Technical Note: Sound Levels from Kongsberg Multibeams. 2005, p. 3. Available online: https://www.kongsberg.com/globalassets/maritime/km-products/product-documents/em_technical_note_web_soundlevelsfromkongsbergmultibeams.pdf (accessed on 14 June 2020).
- Teledyne Marine. Source Level of Teledyne RD Instruments ADCP Transducers, 2020. p. 3. Available online: http://www.teledynemarine.com/Documents/Brand%20Support/RD%20INSTRUMENTS/Technical%20Resources/Technical%20Notes/Technical%20Notes/FST054.PDF (accessed on 30 December 2020).
- Popper, A.; Hawkins, A.; Fay, R.; Mann, D.; Bartol, S.; Carlson, T.; Coombs, S.; Ellison, W.; Gentry, R.; Halvorsen, M.; et al. Sound Exposure Guidelines. In Springer Briefs in Oceanography; Springer International: Cham, Switzerland, 2014; pp. 33–51. [Google Scholar]
- Piniak, W.E.D.; Mann, D.A.; Harms, C.A.; Jones, T.T.; Eckert, S.A. Hearing in the Juvenile Green Sea Turtle (Chelonia mydas): A Comparison of Underwater and Aerial Hearing Using Auditory Evoked Potentials. PLoS ONE 2016, 11, e0159711. [Google Scholar] [CrossRef]
- Smith, M.J. Analysis of the Radiated Sound Field of a Deep-Water Multibeam Echosounder Using a NAVY Hydrophone Array. Master’s Thesis, University of New Hampshire, Durham, NH, USA, 2019. [Google Scholar]
- Deng, Z.D.; Southall, B.L.; Carlson, T.J.; Xu, J.; Martinez, J.J.; Weiland, M.A.; Ingraham, J.M. 200 kHz Commercial Sonar Systems Generate Lower Frequency Side Lobes Audible to Some Marine Mammals. PLoS ONE 2014, 9, e95315. [Google Scholar] [CrossRef]
- National Marine Fisheries Service (NMFS). Takes of Marine Mammals Incident to Specified Activities; Taking Marine Mammals Incidental to Offshore Wind Construction Activities off of Virginia. Fed. Regist. 2020, 85, 14901–14924. Available online: https://www.federalregister.gov/documents/2020/03/16/2020-05281/takes-of-marine-mammals-incidental-to-specified-activities-taking-marine-mammals-incidental-to (accessed on 8 September 2021).
- Roberts, J.J.; Best, B.D.; Mannocci, L.; Fujioka, E.; Halpin, P.N.; Palka, D.L.; Garrison, L.P.; Mullin, K.D.; Cole, T.V.N.; Khan, C.B.; et al. Habitat-based cetacean density models for the U.S. Atlantic and Gulf of Mexico. Sci. Rep. 2016, 6, 22615. [Google Scholar] [CrossRef]
- Geo-Marine, I. Navy OpArea Density Estimates (NODE) for the Northeast OpAreas: Boston, Narrangansett Bay, and Atlantic City; Geo-Marine, Inc.: Plano, TX, USA, 2007; p. 217. Available online: https://seamap.env.duke.edu/downloads/resources/serdp/Northeast%20NODE%20Final%20Report.pdf (accessed on 14 March 2018).
- Geo-Marine, I. Navy OpArea Density Estimates (NODE) for the Southeast OpAreas: VACAPES, CHPT, JAX/CHASN, and Southeastern Florida & AUTEC-Andros; Geo-Marine, Inc.: Plano, TX, USA, 2007; p. 197. Available online: https://seamap.env.duke.edu/downloads/resources/serdp/Southeast%20NODE%20Final%20Report.pdf (accessed on 14 March 2018).
- Becker, E.A.; Forney, K.A.; Miller, D.L.; Fiedler, P.C.; Barlow, J.; Moore, J.E. Habitat-Based Density Estimates for Cetaceans in the California Current Ecosystem Based on 1991–2018 Survey Data; U.S. Department of Commerce, NOAA: Washington, DC, USA, 2020; p. 78. Available online: https://swfsc-publications.fisheries.noaa.gov/publications/CR/2020/2020Becker1.pdf (accessed on 12 April 2022).
- NOAA National Geophysical Data Center. ETOPO1 1 Arc-Minute Global Relief Model. NOAA National Centers for Environmental Information. 2009. Available online: https://www.ncei.noaa.gov/access/metadata/landing-page/bin/iso?id=gov.noaa.ngdc.mgg.dem:316 (accessed on 17 June 2021).
- Kremser, U.; Klemm, P.; Kotz, W.-D. Estimating the risk of temporary acoustic threshold shift, caused by hydroacoustic devices, in whales in the Southern Ocean. Antarct. Sci. 2005, 17, 3–10. [Google Scholar] [CrossRef]
- Geo-Marine, I. Navy OpArea Density Estimates (NODE) for the GOMEX OPAREA; Geo-Marine, Inc.: Plano, TX, USA, 2007; p. 163. Available online: https://seamap.env.duke.edu/downloads/resources/serdp/Gulf%20of%20Mexico%20NODE%20Final%20Report.pdf (accessed on 3 September 2021).
- National Marine Fisheries Service (NMFS). Taking and Importing Marine Mammals: Taking Marine Mammals Incidental to U.S. Navy Operations of Surveillance Towed Array Sensor System Low Frequency Active Sonar. Fed. Regist. 2017, 82, 19460–19527. Available online: https://www.federalregister.gov/documents/2017/04/27/2017-08066/taking-and-importing-marine-mammals-taking-marine-mammals-incidental-to-us-navy-operations-of (accessed on 14 September 2021).
- National Marine Fisheries Service (NMFS). Takes of Marine Mammals Incidental to Specified Activities; Taking Marine Mammals Incidental to U.S. Navy Training and Testing Activities in the Northwest Training and Testing (NWTT) Study Area. Fed. Regist. 2020, 85, 72312–72469. Available online: https://www.federalregister.gov/documents/2020/11/12/2020-23757/taking-and-importing-marine-mammals-taking-marine-mammals-incidental-to-the-us-navy-training-and (accessed on 14 September 2021).
- Sivle, L.D.; Kvadsheim, P.H.; Ainslie, M.A. Potential for population-level disturbance by active sonar in herring. ICES J. Mar. Sci. 2015, 72, 558–567. [Google Scholar] [CrossRef]
- Lurton, X. Modelling of the sound field radiated by multibeam echosounders for acoustical impact assessment. Appl. Acoust. 2016, 101, 201–221. [Google Scholar] [CrossRef]
- Willoughby, G.; MacDonald, N.; Darling, A.; Hiller, T. Applying Novel Sub-Bottom Boomer Technology to the Submerged Wellington Fault, New Zealand. In Proceedings of the Shallow Survey Conference, Wellington, New Zealand, 20–24 February 2012; p. 10. [Google Scholar]
- National Marine Fisheries Service (NMFS). Taking and Importing Marine Mammals; Taking Marine Mammals Incidental to the U.S. Navy Training and Testing Activities in the Northwest Training and Testing (NWTT) Study Area. Fed. Regist. 2021, 86, 8490–8536. Available online: https://www.federalregister.gov/documents/2021/02/05/2021-02263/takes-of-marine-mammals-incidental-to-specified-activities-taking-marine-mammals-incidental-to (accessed on 6 May 2021).
- National Marine Fisheries Service (NMFS). Takes of Marine Mammals Incidental to Specified Activities; Taking Mammals Incidental to Marine Site Characterization Surveys Off of Massachusetts, Rhode Island, Connecticut, and New York. Fed. Regist. 2020, 85, 26940–26962. Available online: https://www.federalregister.gov/documents/2020/05/06/2020-09629/takes-of-marine-mammals-incidental-to-specified-activities-taking-marine-mammals-incidental-to (accessed on 6 May 2021).
- National Marine Fisheries Service (NMFS). Takes of Marine Mammals Incident to Specified Activities; Taking Marine Mammals Incidental to Offshore Wind Construction Activities off of Virginia. Fed. Regist. 2020, 85, 30933–30948. Available online: https://www.federalregister.gov/documents/2020/05/21/2020-10982/takes-of-marine-mammals-incidental-to-specified-activities-taking-marine-mammals-incidental-to (accessed on 8 September 2021).
- U.S. Geological Survey (USGS). Determination of NEPA Adequacy: Low-Energy Geophysical Survey of the Queen Charlotte Fault, Southeastern Alaska; U.S. Geological Survey: Reston, VA, USA, 2017; p. 11. Available online: https://www.usgs.gov/media/files/determination-nepa-adequacy (accessed on 7 September 2022).
- Balster-Gee, A.F.; Baldwin, W.E.; Hart, P.E. U.S. Geological Survey data release. Calibrated marine sparker source amplitude decay versus offset offshore Santa Cruz, California. 2022. Available online: https://www.usgs.gov/products/data/data-releases (accessed on 8 September 2022).
- Teyssandier, B.; Sallas, J.J. The shape of things to come—Development and testing of a new marine vibrator source. Lead. Edge 2019, 38, 680–690. [Google Scholar] [CrossRef]
- Laws, R.M.; Halliday, D.; Hopperstad, J.F.; Gerez, D.; Supawala, M.; Özbek, A.; Murray, T.; Kragh, E. Marine vibrators: The new phase of seismic exploration. Geophys. Prospect. 2019, 67, 1443–1471. [Google Scholar] [CrossRef]
- Matthews, M.-N.R.; Ireland, D.S.; Zeddies, D.G.; Brune, R.H.; Pyć, C.D. A Modeling Comparison of the Potential Effects on Marine Mammals from Sounds Produced by Marine Vibroseis and Air Gun Seismic Sources. J. Mar. Sci. Eng. 2021, 9, 12. [Google Scholar] [CrossRef]
- U.S. Geological Survey (USGS). Final Environmental Assessment of a Marine Geophysical Survey (MATRIX) by the US Geological Survey in the Northwestern Atlantic Ocean, August 2018; U.S. Geological Survey (USGS): Reston, VA, USA, 2018; p. 314. Available online: https://www.usgs.gov/media/files/final-environmental-assessment-a-marine-geophysical-survey-matrix (accessed on 7 September 2022).
- LGL Ltd. Final Environmental Assessment of a Low-Energy Marine Geophysical Survey by the R/V Roger Revelle in the Northeastern Pacific Ocean, September 2017; LGL Ltd.: King City, ON, Canada, 2017; p. 404. Available online: https://www.nsf.gov/geo/oce/envcomp/scripps-oregon-final-ea.pdf (accessed on 22 February 2021).
- National Marine Fisheries Service (NMFS). Takes of Marine Mammals Incidental to Specified Activities; Taking Marine Mammals Incidental to a Low-Energy Geophysical Survey in the Northeastern Pacific Ocean. Fed. Regist. 2017, 82, 29307–39276. Available online: https://www.federalregister.gov/documents/2017/08/17/2017-17378/takes-of-marine-mammals-incidental-to-specified-activities-taking-marine-mammals-incidental-to-a (accessed on 15 September 2021).
- National Marine Fisheries Service (NMFS). Takes of Marine Mammals Incidental to Specified Activities; Taking Marine Mammals Incidental to a Marine Geophysical Survey in the Northwest Atlantic Ocean. Fed. Regist. 2018, 83, 39692–39709. Available online: https://www.federalregister.gov/documents/2018/08/10/2018-17170/takes-of-marine-mammals-incidental-to-specified-activities-taking-marine-mammals-incidental-to-a (accessed on 15 September 2021).
- Wölfl, A.-C.; Snaith, H.; Amirebrahimi, S.; Devey, C.W.; Dorschel, B.; Ferrini, V.; Huvenne, V.A.I.; Jakobsson, M.; Jencks, J.; Johnston, G.; et al. Seafloor Mapping—The Challenge of a Truly Global Ocean Bathymetry. Front. Mar. Sci. 2019, 6, 283. [Google Scholar] [CrossRef]
- Ocean Science and Technology Subcommittee. National Strategy for Mapping, Exploring, and Characterizing the United States Exclusive Economic Zone; Office of Science and Technology Policy: Washington, DC, USA, 2020; p. 25. Available online: https://iocm.noaa.gov/about/documents/strategic-plans/20200611-FINAL-STRATEGY-NOMEC-Sec.-2.pdf (accessed on 23 February 2021).
- Southwest Fisheries Science Center (SWFSC). Request for Rulemaking and Letters of Authorization under Section 101(a)(5)(A) of the Marine Mammal Protection Act for the Take of Marine Mammals Incidental to Fisheries and Ecosystems Research Activities Conducted by NOAA Fisheries Southwest Fisheries Science Center within the California Current Ecosystem, Eastern Tropical Pacific Ecosystem, and Antarctic Ecosystem; NOAA Fisheries Southwest Fisheries Science Center: La Jolla, CA, USA, 2013; p. 210. Available online: https://media.fisheries.noaa.gov/dam-migration/swfsc_loa2015_application.pdf (accessed on 14 October 2020).
- Kates Varghese, H.; Miksis-Olds, J.; DiMarzio, N.; Lowell, K.; Linder, E.; Mayer, L.; Moretti, D. The effect of two 12 kHz multibeam mapping surveys on the foraging behavior of Cuvier’s beaked whales off of southern California. J. Acoust. Soc. Am. 2020, 147, 3849–3858. [Google Scholar] [CrossRef] [PubMed]
- Kates Varghese, H.; Lowell, K.; Miksis-Olds, J.; DiMarzio, N.; Moretti, D.; Mayer, L. Spatial Analysis of Beaked Whale Foraging During Two 12 kHz Multibeam Echosounder Surveys. Front. Mar. Sci. 2021, 8, 1139. [Google Scholar] [CrossRef]
- Quick, N.; Scott-Hayward, L.; Sadykova, D.; Nowacek, D.; Read, A. Effects of a scientific echo sounder on the behavior of short-finned pilot whales (Globicephala macrorhynchus). Can. J. Fish. Aquat. Sci. 2016, 74, 716–726. [Google Scholar] [CrossRef]
- Cholewiak, D.; DeAngelis, A.I.; Palka, D.; Corkeron, P.J.; Van Parijs, S.M. Beaked whales demonstrate a marked acoustic response to the use of shipboard echosounders. R. Soc. Open Sci. 2017, 4, 170940. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Vires, G. Echosounder Effects on Beaked Whales in the Tongue of the Ocean. Master’s Thesis, Duke University, Durham, NC, USA, 2011. Available online: https://hdl.handle.net/10161/3729 (accessed on 26 September 2021).
- Tougaard, J.; Wright, A.J.; Madsen, P.T. Cetacean noise criteria revisited in the light of proposed exposure limits for harbour porpoises. Mar. Pollut. Bull. 2015, 90, 196–208. [Google Scholar] [CrossRef]
- Kastelein, R.; Gransier, R. Effect of Series of 1 to 2 kHz and 6 to 7 kHz Up-Sweeps and Down-Sweeps on the Behavior of a Harbor Porpoise (Phocoena phocoena). Aquat. Mamm. 2014, 40, 232–242. [Google Scholar] [CrossRef]
- Kastelein, R.A.; Hoek, L.; de Jong, C.A.F.; Wensveen, P.J. The effect of signal duration on the underwater detection thresholds of a harbor porpoise (Phocoena phocoena) for single frequency-modulated tonal signals between 0.25 and 160 kHz. J. Acoust. Soc. Am. 2010, 128, 3211–3222. [Google Scholar] [CrossRef]
- Tougaard, J.; Beedholm, K. Practical implementation of auditory time and frequency weighting in marine bioacoustics. Appl. Acoust. 2019, 145, 137–143. [Google Scholar] [CrossRef]
- Vineyard Wind. Draft Request for an Incidental Harassment Authorization to Allow the Non-Lethal Take of Marine Mammals Incidental to High-Resolution Geophysical Surveys; National Marine Fisheries Service Office of Protected Resources: Silver Spring, MD, USA, 2020; p. 92. Available online: https://media.fisheries.noaa.gov/dam-migration/vineyardwind_501-522_2020iha_appl_opr1.pdf (accessed on 2 September 2021).
- Erbe, C.; Reichmuth, C.; Cunningham, K.; Lucke, K.; Dooling, R. Communication masking in marine mammals: A review and research strategy. Mar. Pollut. Bull. 2016, 103, 15–38. [Google Scholar] [CrossRef] [PubMed]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Marine Acoustic Source | Transmission Frequency | Source Level (dB re 1 μPa @ 1 m) a | Type/ Directionality b | Max Pulse Duration (ms) c | Min. Ping Repetition Rate (s) d | Example System(s) e |
|---|---|---|---|---|---|---|
| Airguns/Marine Vibrators | ||||||
| Single airgun (seismic) | 15–60 Hz | 216–235 f | I, O | Few ms | >5 s | Sercel 105/105 in3 GI gun; Teledyne Bolt airguns up to 250 in3 |
| Airgun arrays (seismic) | 15–60 Hz | 228–259 f | I, D | Few ms | >5 s | Multiple GI or airguns |
| Marine vibrator g (vibroseis) | 5–100 Hz | unknown | N, O/D | 5000 | 10 | Experimental source |
| High-Resolution Geophysical (HRG) Sources | ||||||
| Boomer (seismic) | 300–3000 Hz | 185–207 | I h, D | 0.6 | 0.167 | Applied Acoustics S-boom |
| Sparker (seismic) i | 300–1400 Hz | 185–226 f | I, O | 3 | 0.25 | Applied Acoustics Delta Sparker, SIG ELC sparker |
| Bubble gun (seismic) | 20–2000 Hz | 194–220 | I, D | 1.6 | 0.125 | HMS-620 |
| Subbottom profilers (SBP) | ||||||
| Hull-mounted | 3.5, 12 kHz | 199–232 | N, D | 64 | 1 | Knudsen 3260 (4 × 4 array) |
| Shallow-towed j | 0.5–24 kHz | 146–180 | N, D | 9 | 0.125 | Edgetech 512i, Edgetech 424 |
| Parametric k | 1–115 kHz | 206–247 | N, D | 2.5 | 0.025 | TOPAS, Innomar systems |
| Multibeam echosounder (MBES) | 12–600 kHz | 175–245 | N, D | 100 ℓ | 5 | EM122, EM302, EM710, Reson 7160, ME70 |
| Sidescan sonar (SSS) | 65–500 kHz | 196–224 | N, D | 0.4–1.6 m | 0.013 m | L3 Klein 5000, Edgetech 4200 |
| Oceanographic Acoustics | ||||||
| Split beam echosounder (SBES; fisheries sonar) | 18–333 kHz | 212–229 | N, D | 8 | 1 | Simrad EK60/80 |
| Acoustic Doppler current profiler (ADCP) | 38 to >300 kHz | 211–227 | N, D | 37 | 1 | RD Workhorse |
| Communication/Tracking Acoustics | ||||||
| Acoustic locators (pingers) | 12–40 kHz | 177–192 | N, O/D | 22 | varies | Edgetech CAT, Benthos UAT-376 |
| Acoustic releases | 8–34 kHz | 184–192 | N, O | varies | varies | Edgetech 8242, Sonardyne 7410 |
| Underwater tracking systems | 10–35 kHz | 187–203 | N, O/D | 300 | 1 | Applied Acoustics 1162, Edgetech 4380 |
| DE MINIMIS FACTORS DEFINED HERE | ||||||
|---|---|---|---|---|---|---|
| 1: Transmission Frequency b | 2: Threshold take Radius c | 3: Radiated Power d | 4: Beamwidth Limit e | 5: Degree of Exposure f | NMFS Precedent g | |
| 1-, 2-plate Boomer a | Not evaluated | |||||
| 3-plate Boomer a | • (Lowest powered) | • | ||||
| Sparker a | • (Lowest powered) | |||||
| Bubble Gun a | Not evaluated | |||||
| Marine Vibrators a | Not evaluated | |||||
| Subbottom profiler (SBP; hull-mounted, non-parametric) | • | • | ||||
| SBP (towed, non-parametric, for versions evaluated here) | • | |||||
| SBP (parametric) | Not evaluated | • | ||||
| Multibeam Echosounder (MBES) | • (Some) | • | ||||
| Sidescan sonar (SSS) | • (Some) | • | ||||
| Split-beam Echosounder (SBES) | • (Some) | • | • | |||
| Acoustic Doppler Current Profiler (ADCP) | • | • | ||||
| Pingers (acoustic locators) | • | • | ||||
| Acoustic releases | • (Most) | • | ||||
| Underwater navigation | • (Some) | • (Some) | • | |||
| Category | Short Description | Example Sources |
|---|---|---|
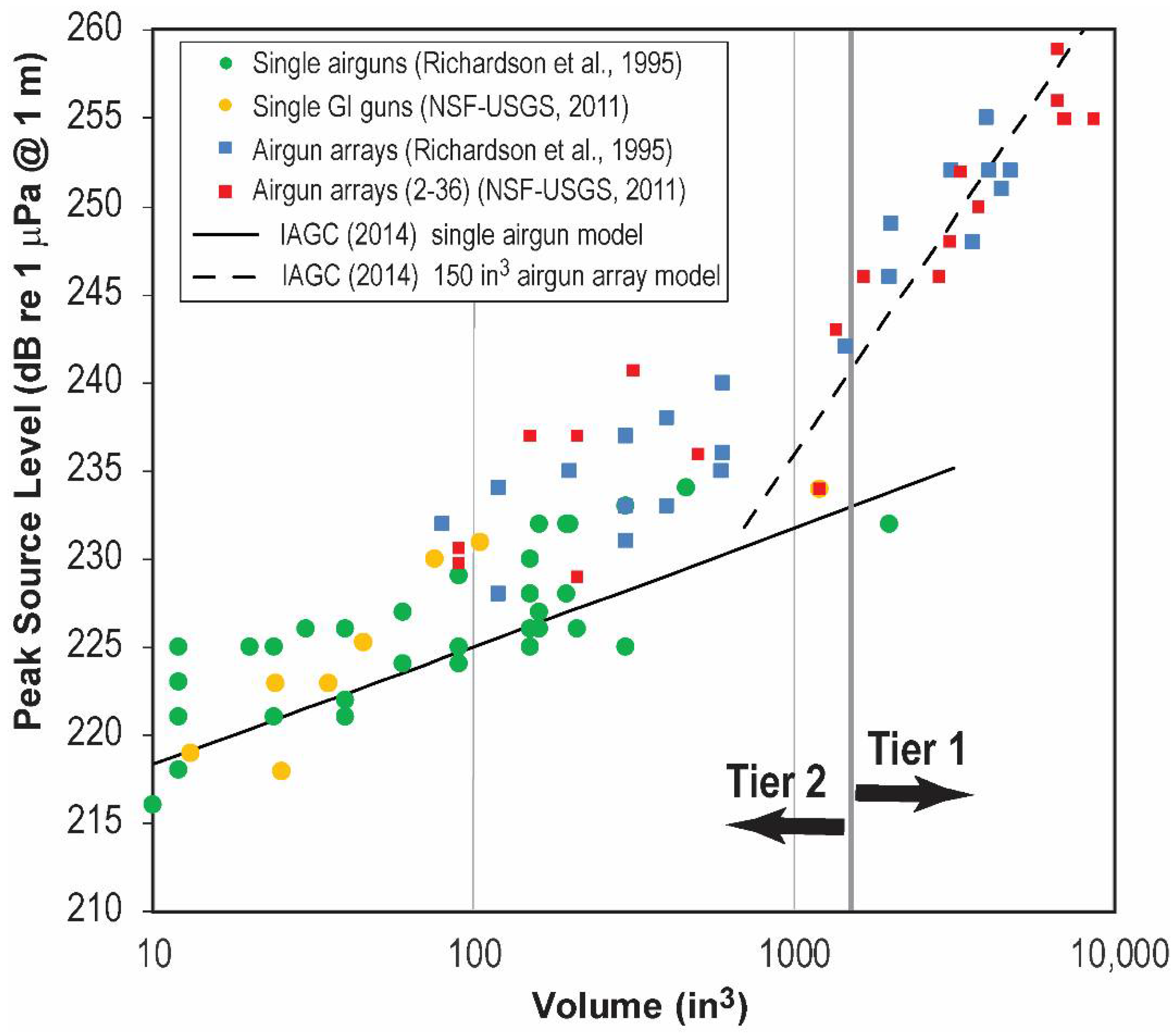
| Tier 1 | High-energy airgun surveys (includes GI guns) | Total airgun volume > 1500 in3 or arrays larger than 12 airguns |
| Tier 2 | Low/intermediate energy airgun surveys (includes GI guns) | Total airgun volume < 1500 in3 |
| Tier 3 | HRG seismic sources (most) | Some sparker configurations Impulsive sources requiring further analysis: bubble gun; some 1-and 2-plate boomers |
| Tier 4 | De minimis sources (not likely to result in incidental take) | MBES, SSS, hull-mounted SBP; towed SBP evaluated here; parametric SBP a; SBES (EK60/80), lowest powered sparkers, 3-plate boomers, ADCP, pingers (locators), acoustic releases, seafloor/water column navigational/tracking acoustics for ROVs, AUVs, etc. a |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ruppel, C.D.; Weber, T.C.; Staaterman, E.R.; Labak, S.J.; Hart, P.E. Categorizing Active Marine Acoustic Sources Based on Their Potential to Affect Marine Animals. J. Mar. Sci. Eng. 2022, 10, 1278. https://doi.org/10.3390/jmse10091278
Ruppel CD, Weber TC, Staaterman ER, Labak SJ, Hart PE. Categorizing Active Marine Acoustic Sources Based on Their Potential to Affect Marine Animals. Journal of Marine Science and Engineering. 2022; 10(9):1278. https://doi.org/10.3390/jmse10091278
Chicago/Turabian StyleRuppel, Carolyn D., Thomas C. Weber, Erica R. Staaterman, Stanley J. Labak, and Patrick E. Hart. 2022. "Categorizing Active Marine Acoustic Sources Based on Their Potential to Affect Marine Animals" Journal of Marine Science and Engineering 10, no. 9: 1278. https://doi.org/10.3390/jmse10091278