
Design and Optimization of an Asymmetric Rotor IPM Motor with High Demagnetization Prevention Capability and Robust Torque Performance

Abstract
:1. Introduction
2. Basic Models and Evaluation Method of Motor Performance
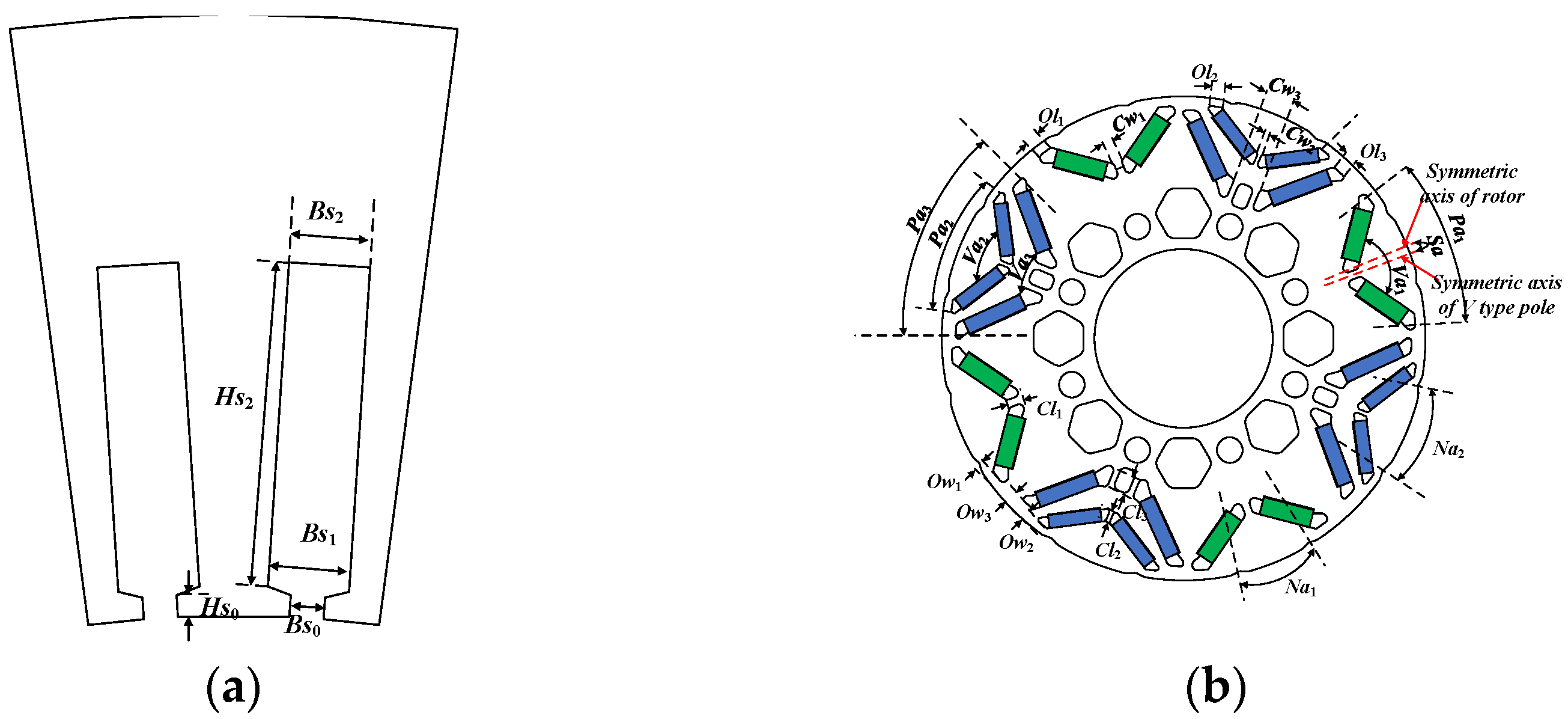
2.1. Basic Models
2.2. Evaluation Method of Motor Performance
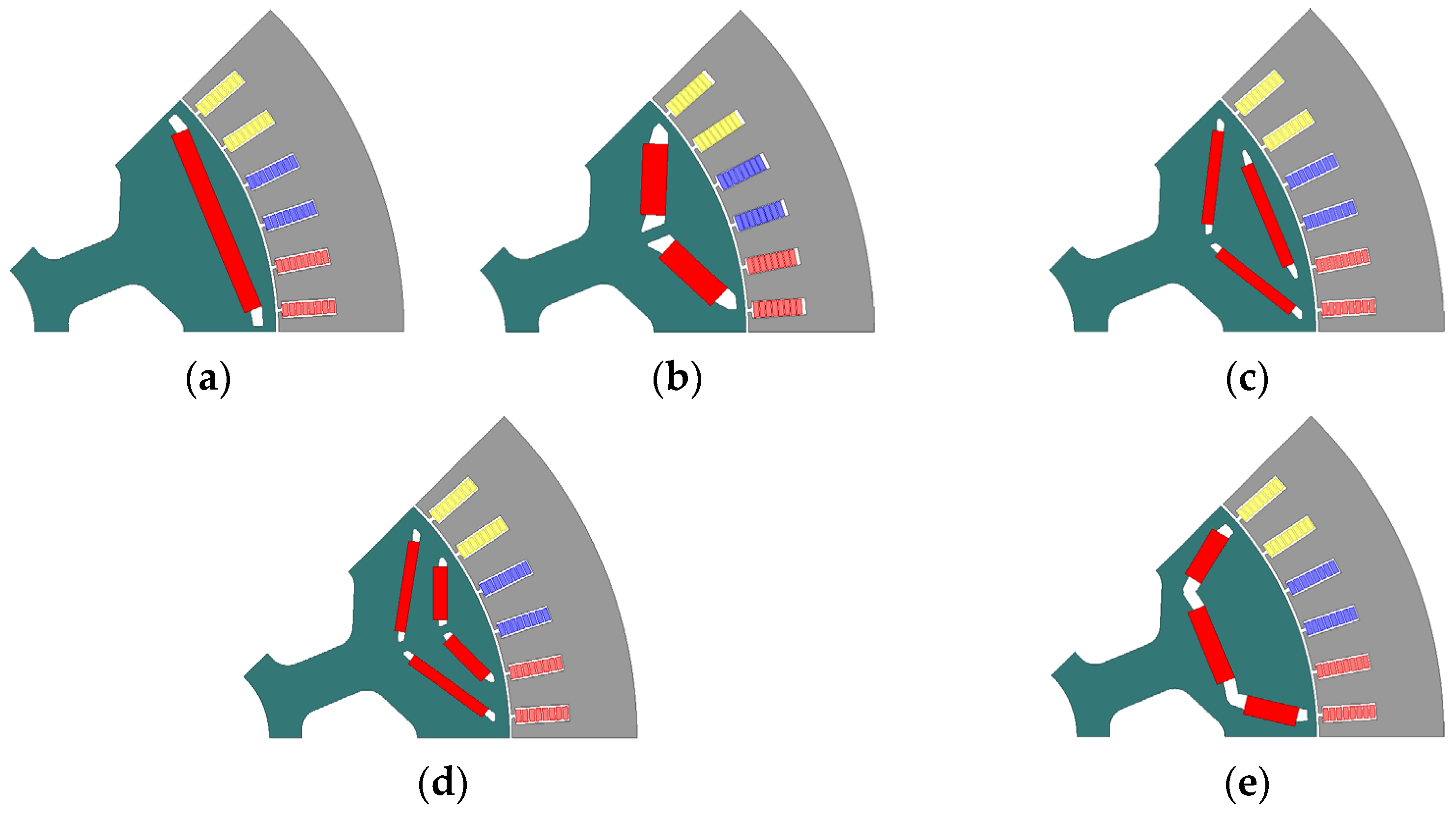
3. Motor Performance Comparison of Five Basic IPM Motors
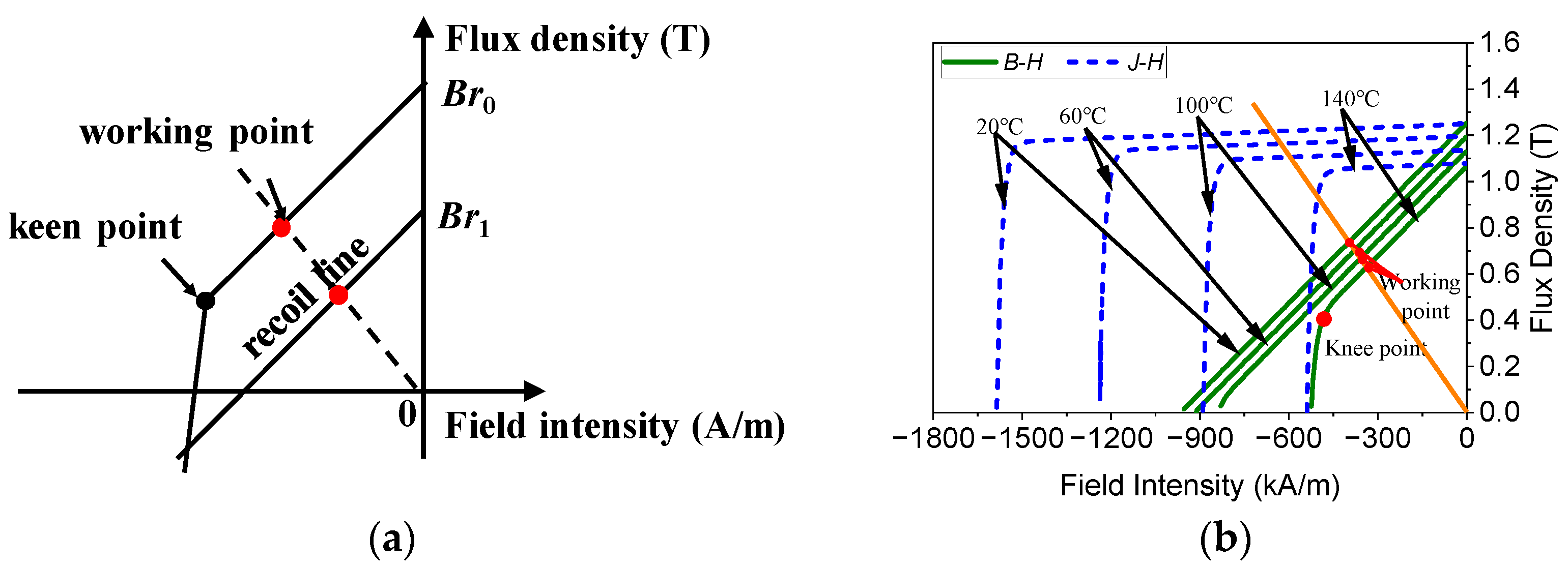
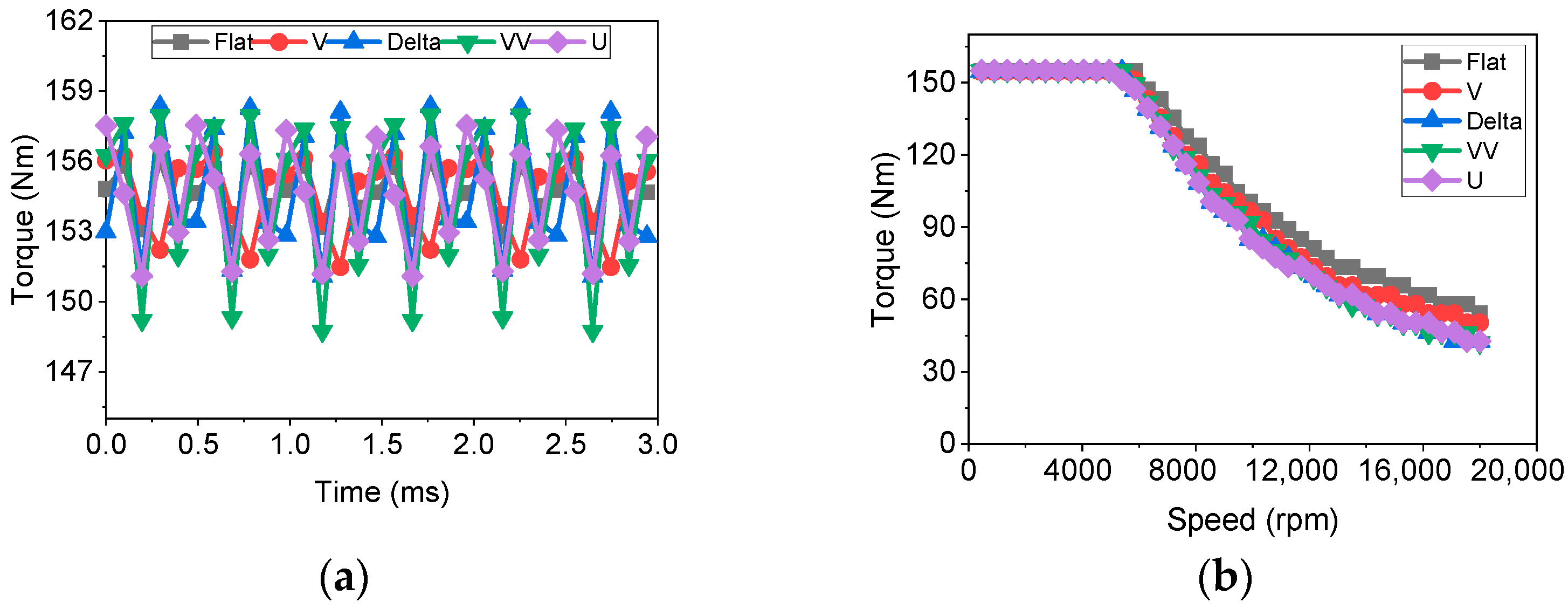
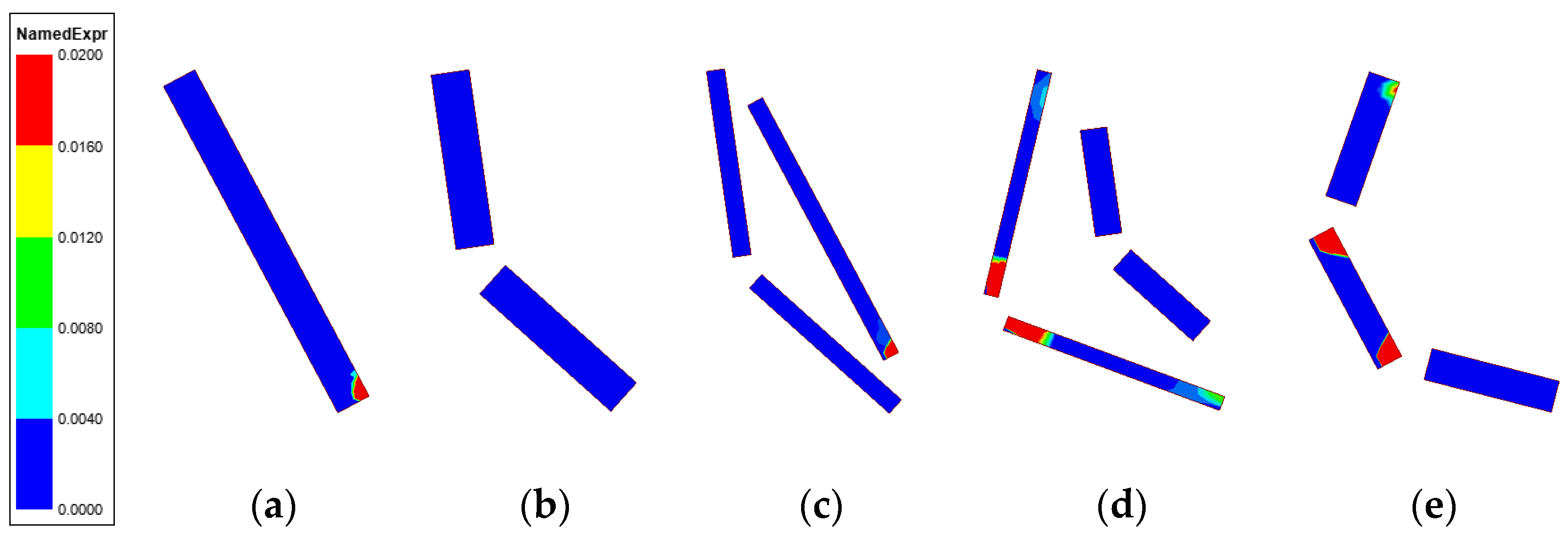
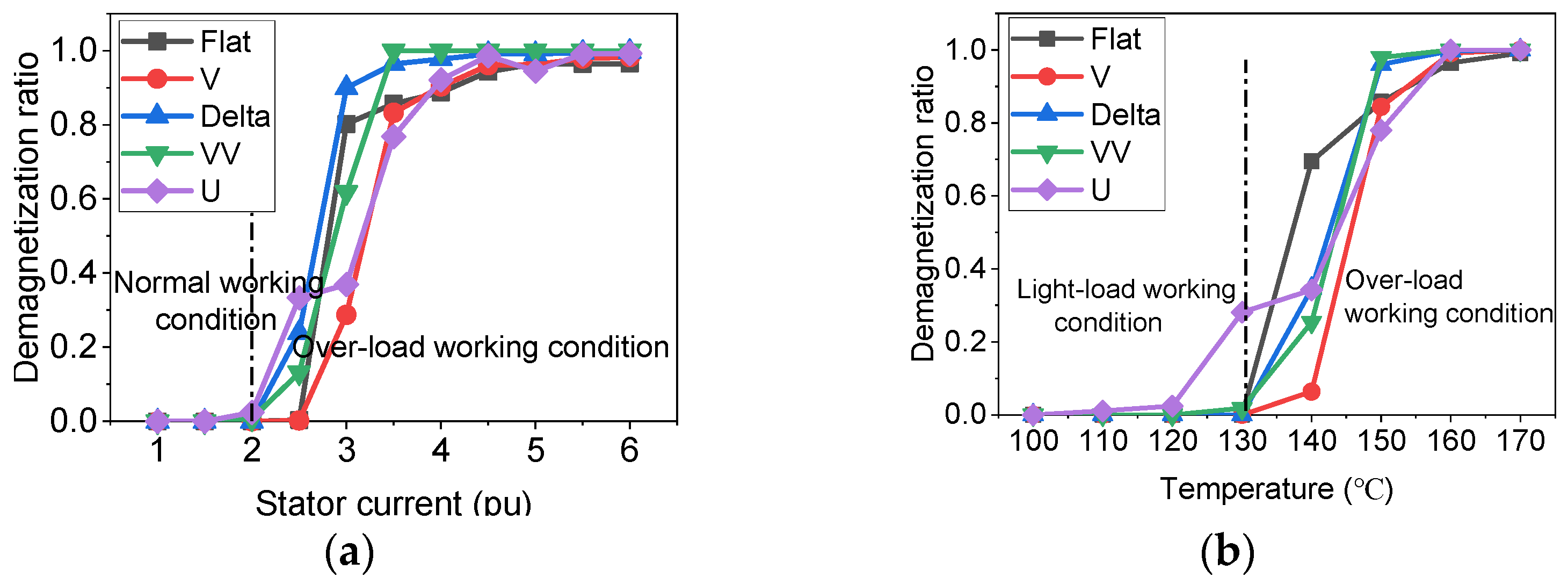
3.1. Torque Characteristics and PM Demagnetization Ratio
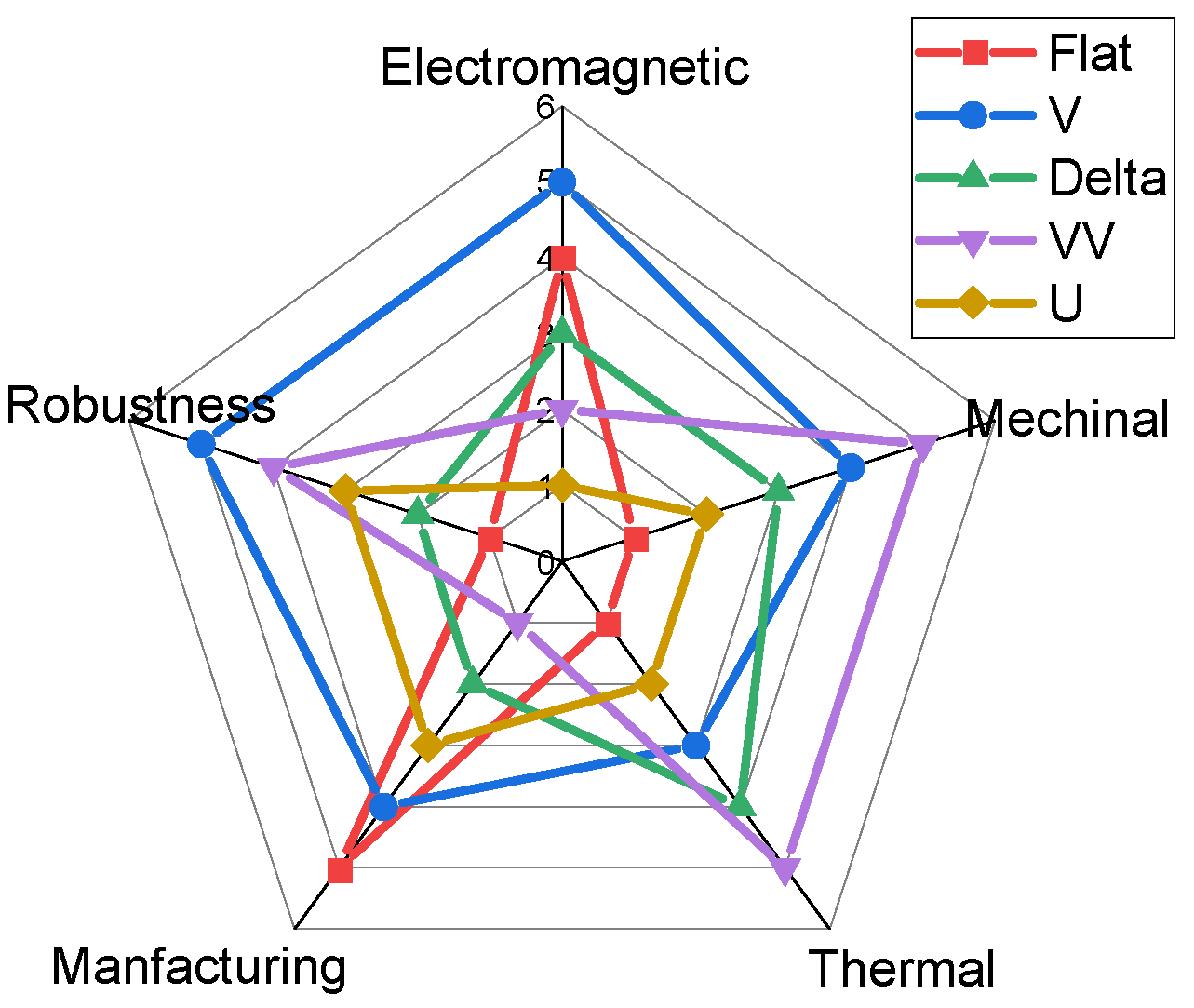
3.2. Multi-Physical Performance Assessment
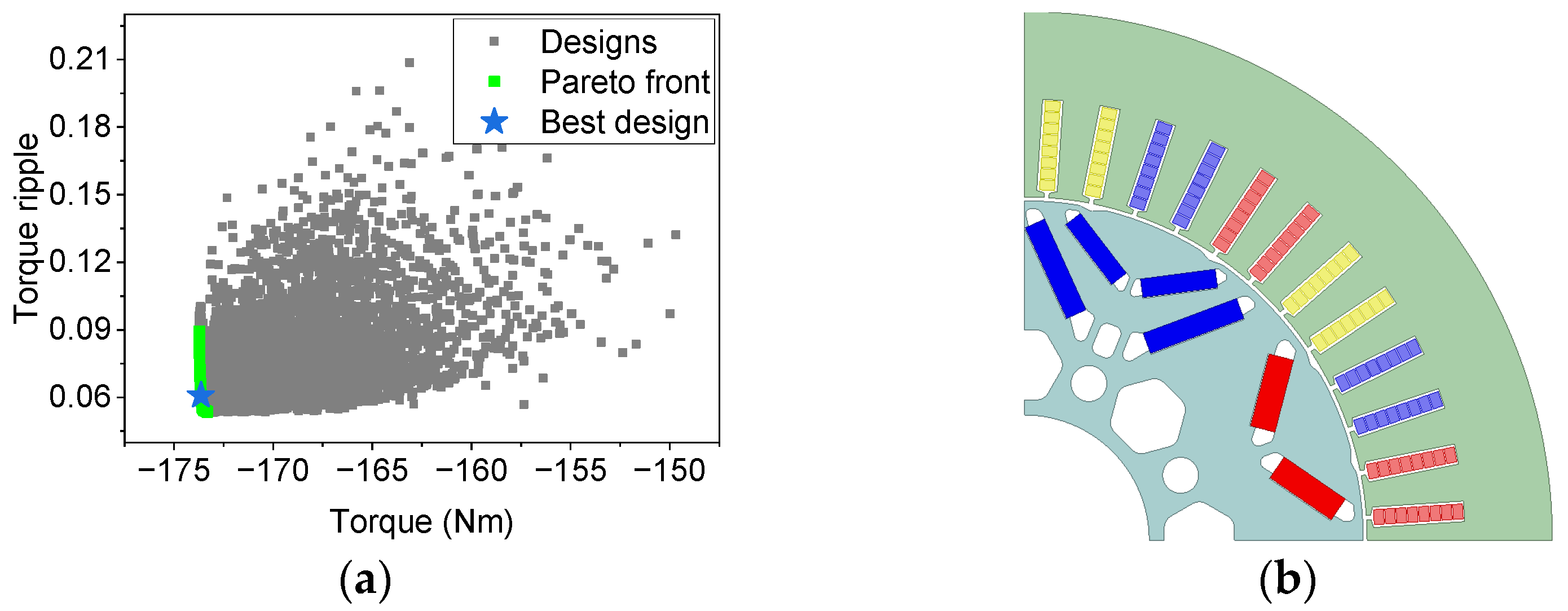
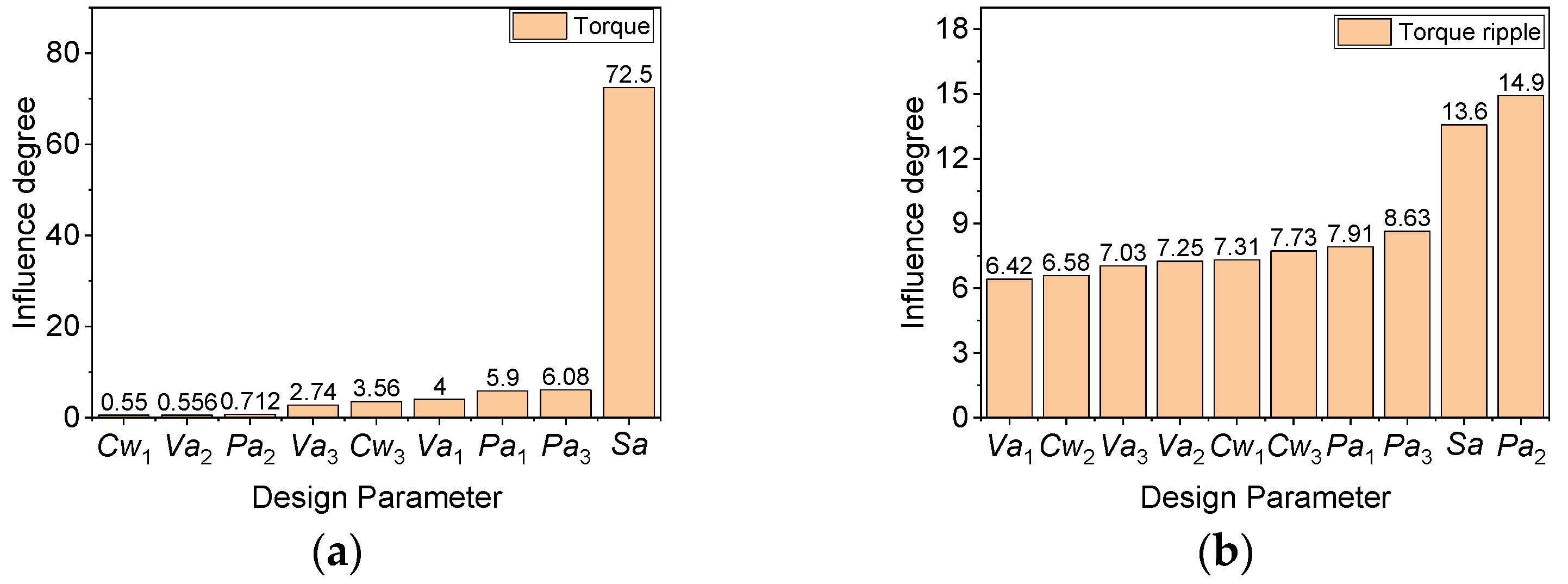
4. Multi-Objective Design Optimization and Performance Improvement Mechanism of ARIPM Motor
4.1. Asymmetric Motor Topologies
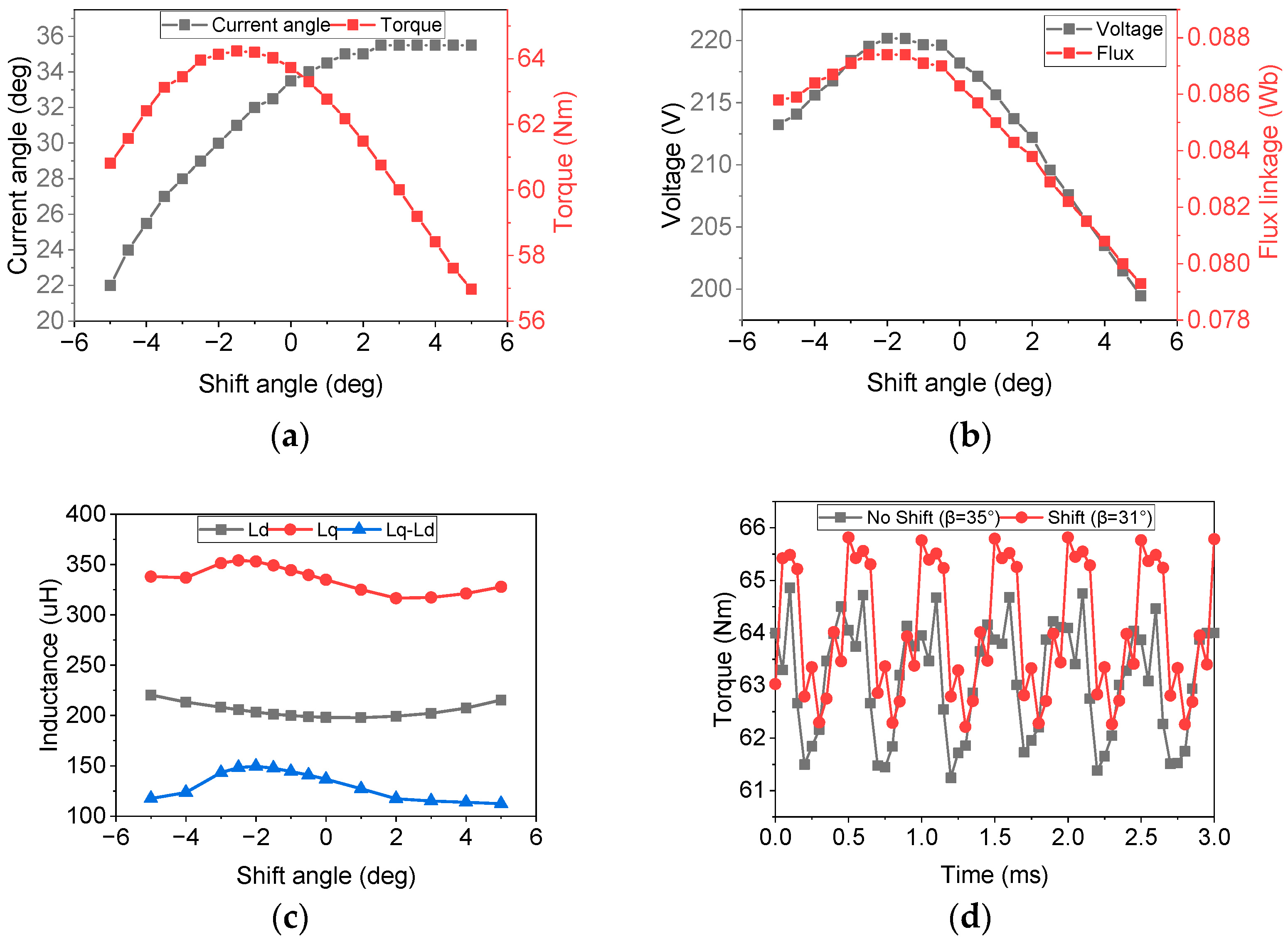
4.2. Effects of V-Type Pole Shift Angle
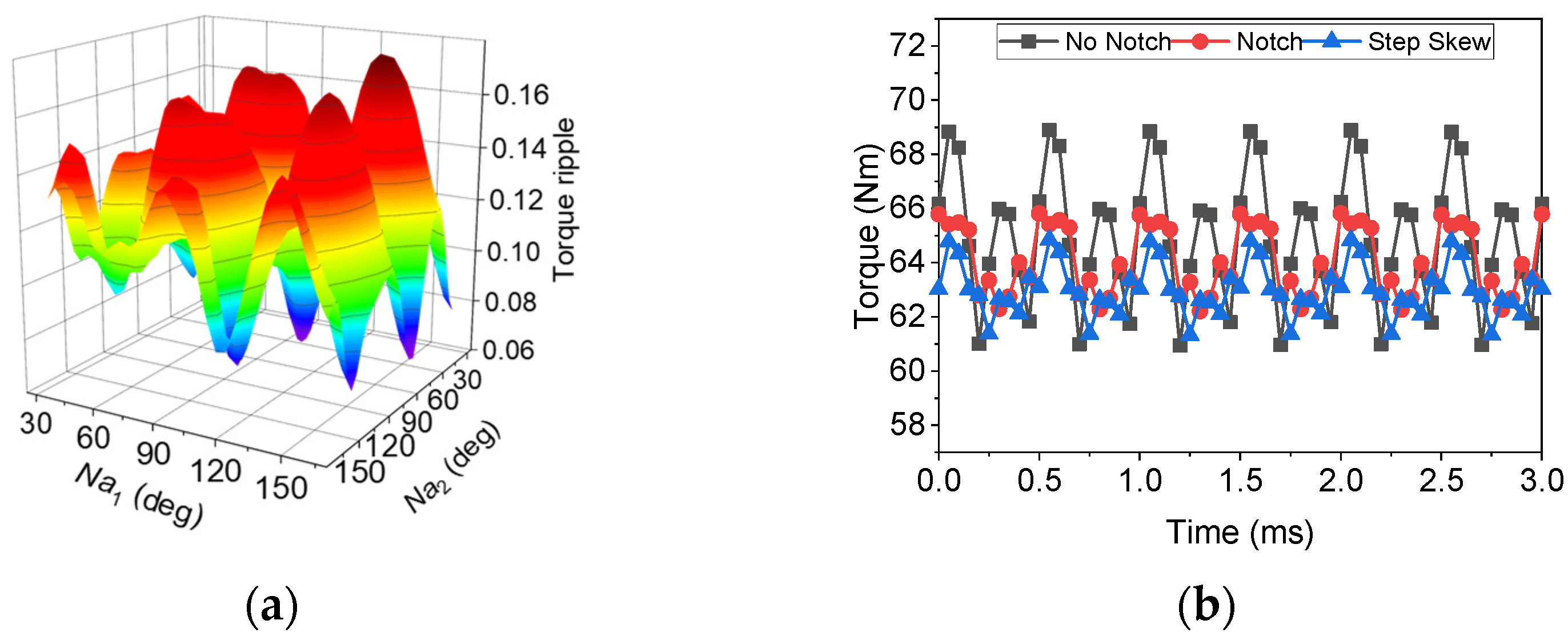
4.3. Effects of Asymmetric Rotor Notch
5. Performance Superiority Validation of ARIPM Motor
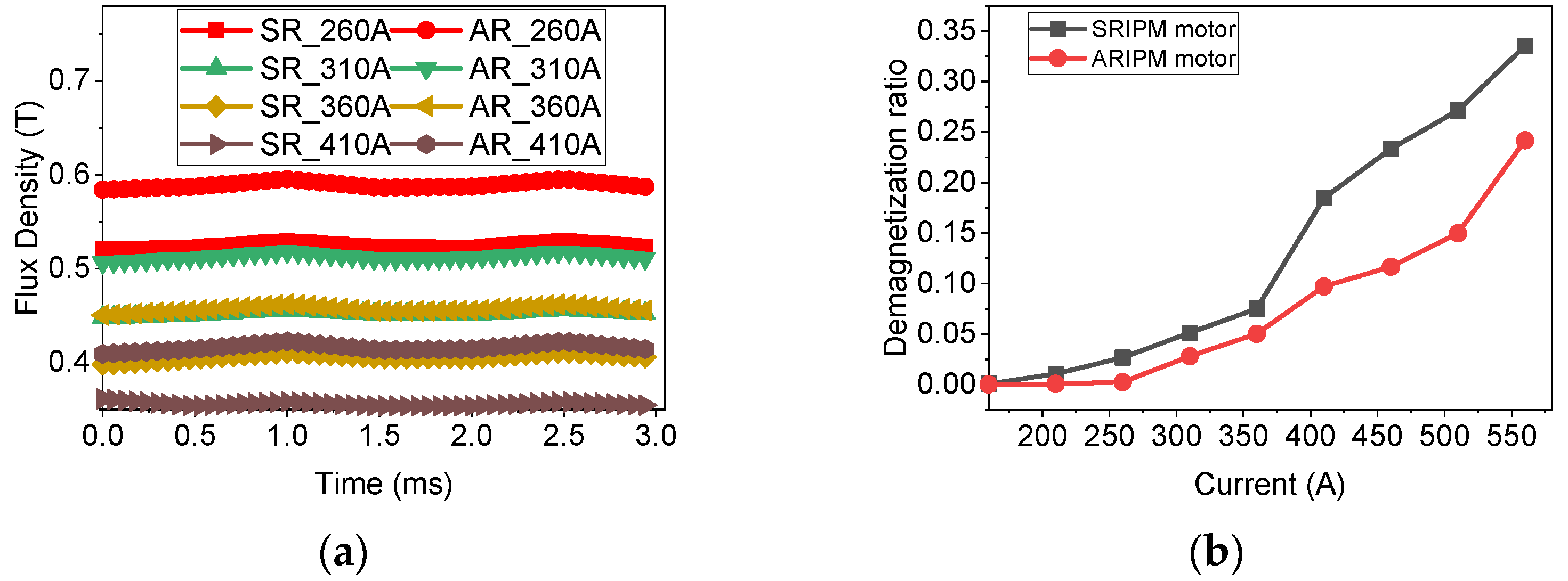
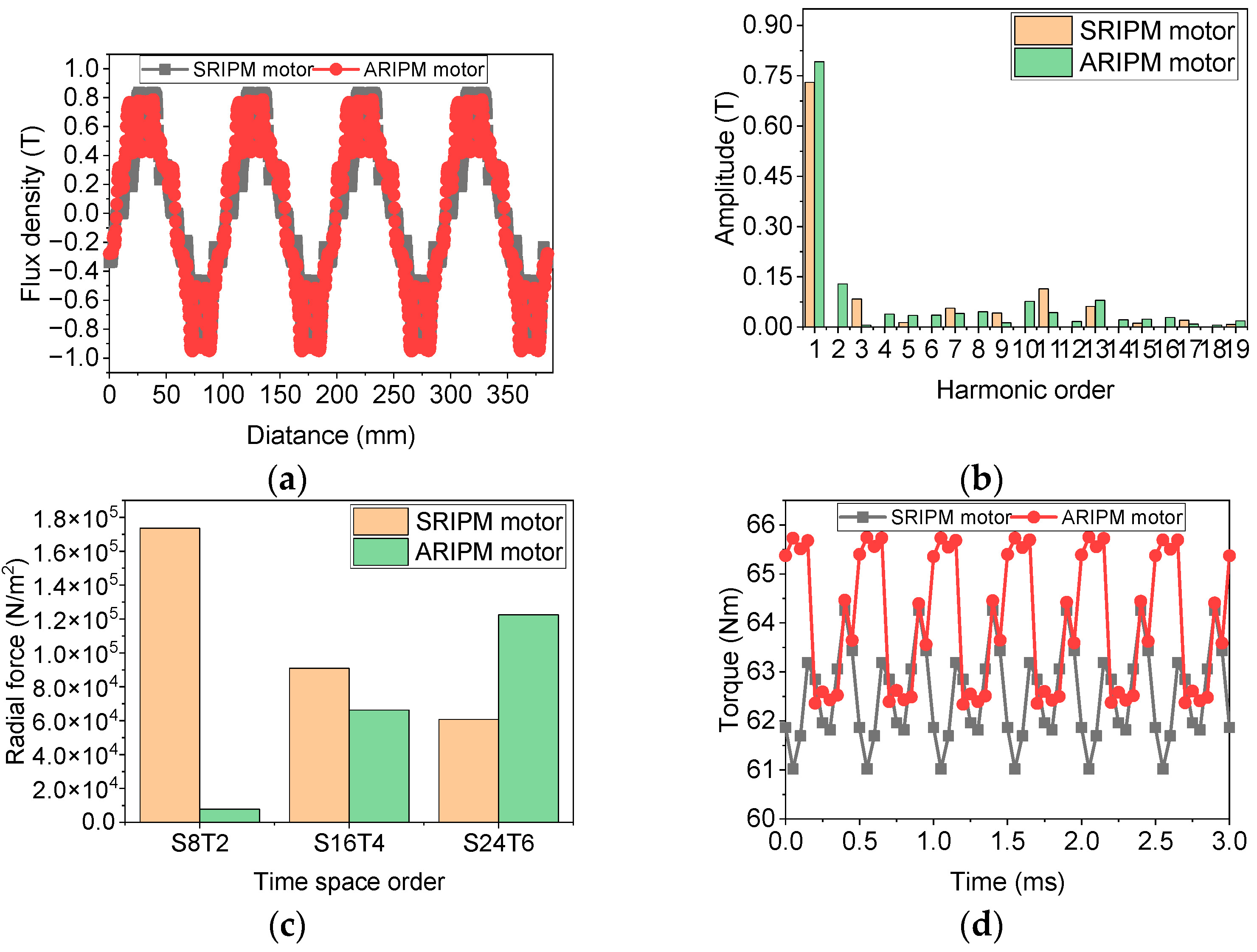
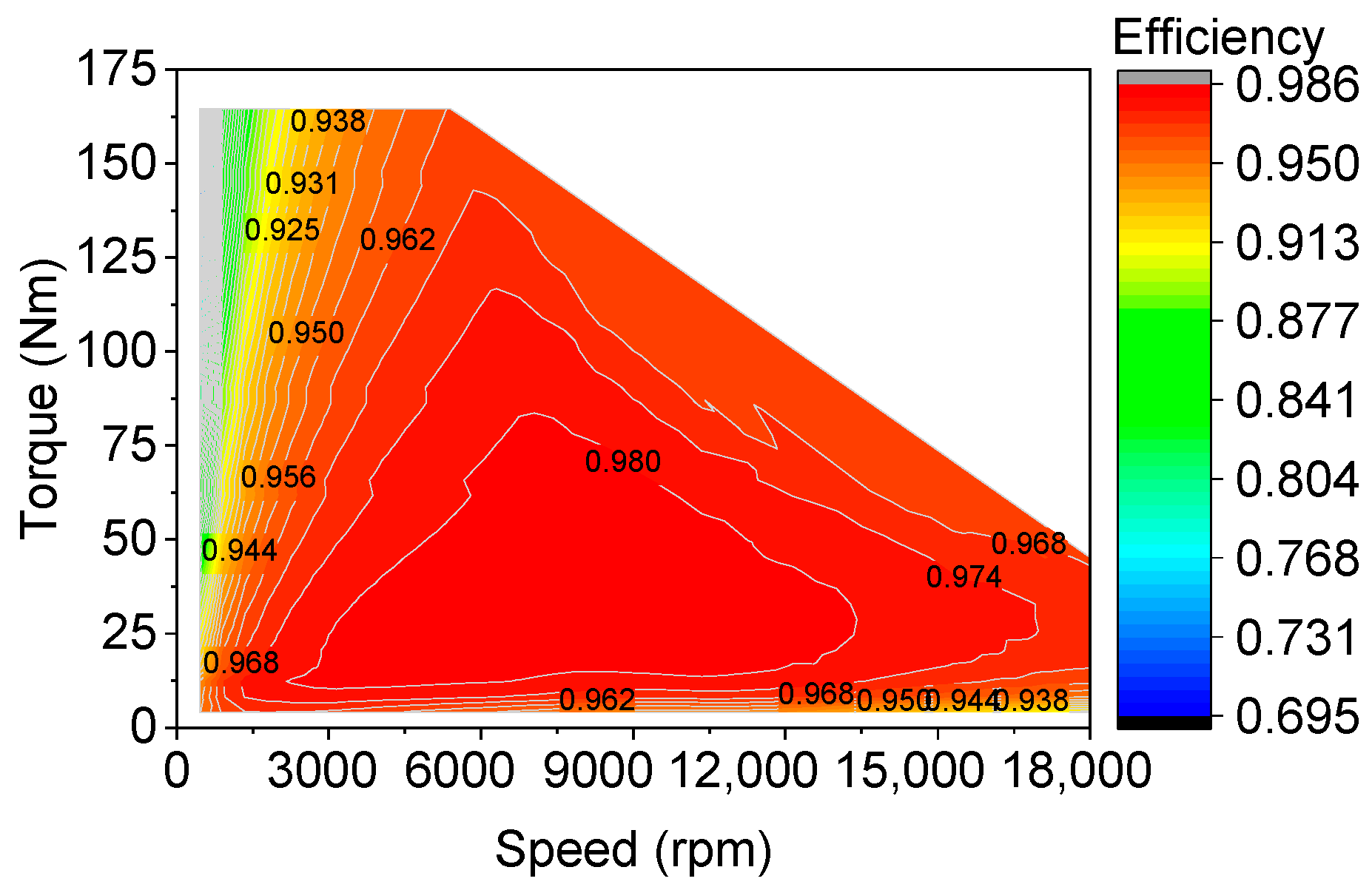
5.1. PM Demagnetization Prevention Capability and Nominal Electromagnetic Characteristics
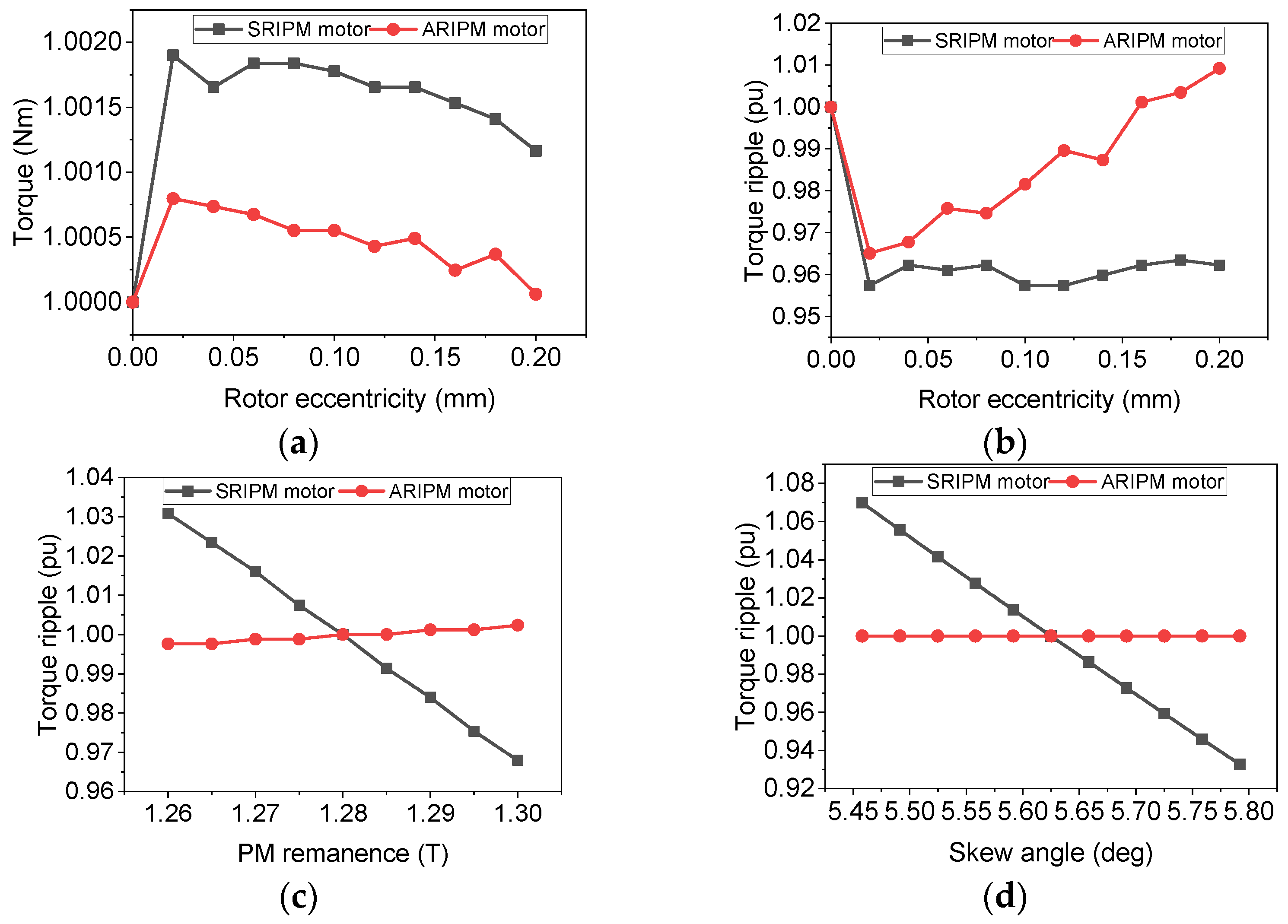
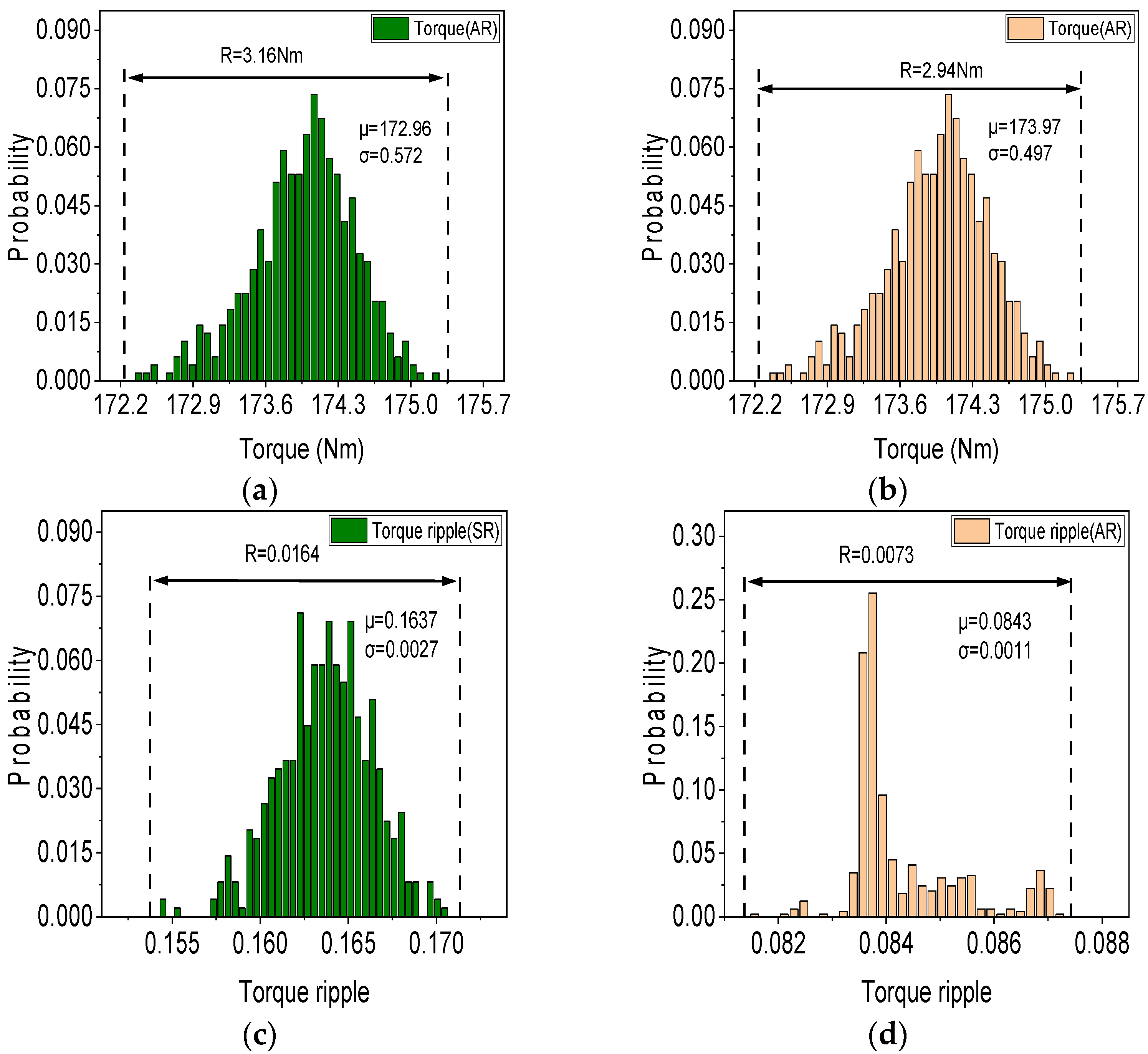
5.2. Torque and Torque Ripple Robustness
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhu, X.; Huang, J.; Quan, L.; Xiang, Z.; Shi, B. Comprehensive Sensitivity Analysis and Multiobjective Optimization Research of Permanent Magnet Flux-Intensifying Motors. IEEE Trans. Ind. Electron. 2019, 66, 2613–2627. [Google Scholar] [CrossRef]
- Ou, J.; Liu, Y.; Doppelbauer, M. Comparison Study of a Surface-Mounted PM Rotor and an Interior PM Rotor Made From Amorphous Metal of High-Speed Motors. IEEE Trans. Ind. Electron. 2021, 68, 9148–9159. [Google Scholar] [CrossRef]
- Sun, X.; Shi, Z.; Lei, G.; Guo, Y.; Zhu, J. Multi-Objective Design Optimization of an IPMSM Based on Multilevel Strategy. IEEE Trans. Ind. Electron. 2021, 68, 139–148. [Google Scholar] [CrossRef]
- Choi, G.; Jahns, T.M. Analysis and Design Recommendations to Mitigate Demagnetization Vulnerability in Surface PM Synchronous Machines. IEEE Trans. Ind. Appl. 2018, 54, 1292–1301. [Google Scholar] [CrossRef]
- Baranski, M.; Szelag, W.; Lyskawinski, W. Experimental and Simulation Studies of Partial Demagnetization Process of Permanent Magnets in Electric Motors. IEEE Trans. Energy Convers. 2021, 36, 3137–3145. [Google Scholar] [CrossRef]
- Chen, H.; Qu, R.; Li, J.; Li, D. Demagnetization Performance of a 7 MW Interior Permanent Magnet Wind Generator with Fractional-Slot Concentrated Windings. IEEE Trans. Magn. 2015, 51, 8205804. [Google Scholar] [CrossRef]
- Lim, S.; Min, S.; Hong, J.-P. Optimal Rotor Design of IPM Motor for Improving Torque Performance Considering Thermal Demagnetization of Magnet. IEEE Trans. Magn. 2015, 51, 8202405. [Google Scholar] [CrossRef]
- Diao, K.; Sun, X.; Lei, G.; Bramerdorfer, G.; Guo, Y.; Zhu, J. Robust Design Optimization of Switched Reluctance Motor Drive Systems Based on System-Level Sequential Taguchi Method. IEEE Trans. Energy. Convers. 2021, 36, 3199–3207. [Google Scholar] [CrossRef]
- Li, W.; Feng, G.; Lai, C.; Li, Z.; Tian, J.; Kar, N.C. Demagnetization Analysis of Interior Permanent Magnet Machines Under Integrated Charging Operation. IEEE Trans. Ind. Appl. 2019, 55, 5204–5213. [Google Scholar] [CrossRef]
- Sarikhani, A.; Mohammed, O.A. Demagnetization Control for Reliable Flux Weakening Control in PM Synchronous Machine. IEEE Trans. Energy Convers. 2012, 27, 1046–1055. [Google Scholar] [CrossRef]
- Wu, W.; Zhu, X.; Quan, L.; Du, Y.; Xiang, Z.; Zhu, X. Design and Analysis of a Hybrid Permanent Magnet Assisted Synchronous Reluctance Motor Considering Magnetic Saliency and PM Usage. IEEE Trans. Appl. Supercond. 2018, 28, 1–6. [Google Scholar] [CrossRef]
- Cao, R.; Mi, C.; Cheng, M. Quantitative Comparison of Flux-Switching Permanent-Magnet Motors With Interior Permanent Magnet Motor for EV, HEV, and PHEV Applications. IEEE Trans. Magn. 2012, 48, 2374–2384. [Google Scholar] [CrossRef]
- Liu, X.; Chen, H.; Zhao, J.; Belahcen, A. Research on the Performances and Parameters of Interior PMSM Used for Electric Vehicles. IEEE Trans. Ind. Electron. 2016, 63, 3533–3545. [Google Scholar] [CrossRef]
- Ki-Chan, K.; Kwangsoo, K.; Jun, K.H.; Ju, L. Demagnetization Analysis of Permanent Magnets According to Rotor Types of Interior Permanent Magnet Synchronous Motor. IEEE Trans. Magn. 2009, 45, 2799–2802. [Google Scholar] [CrossRef]
- Xiao, Y.; Zhu, Z.Q.; Wang, S.S.; Jewell, G.W.; Chen, J.T.; Wu, D.; Gong, L.M. A Novel Asymmetric Interior Permanent Magnet Machine for Electric Vehicles. IEEE Trans. Energy Convers. 2021, 36, 2404–2415. [Google Scholar] [CrossRef]
- Xu, G.; Liu, G.; Zhao, W.; Chen, Q.; Du, X. Principle of Torque-Angle Approaching in a Hybrid Rotor Permanent-Magnet Motor. IEEE Trans. Ind. Electron. 2019, 66, 2580–2591. [Google Scholar] [CrossRef]
- Li, F.; Wang, K.; Li, J.; Sun, H.Y. Electromagnetic Performance Analysis of Consequent-Pole PM Machine with Asymmetric Magnetic Pole. IEEE Trans. Magn. 2019, 55, 1–5. [Google Scholar] [CrossRef]
- Ren, W.; Xu, Q.; Li, Q.; Zhou, L. Reduction of Cogging Torque and Torque Ripple in Interior PM Machines With Asymmetrical V-Type Rotor Design. IEEE Trans. Magn. 2016, 52, 8104105. [Google Scholar] [CrossRef]
- Zhao, W.; Zhao, F.; Lipo, T.A.; Kwon, B.-I. Optimal Design of a Novel V-Type Interior Permanent Magnet Motor with Assisted Barriers for the Improvement of Torque Characteristics. IEEE Trans. Magn. 2014, 50, 8104504. [Google Scholar] [CrossRef]
- Li, Y.; Yang, H.; Lin, H.; Fang, S.; Wang, W. A Novel Magnet-Axis-Shifted Hybrid Permanent Magnet Machine for Electric Vehicle Applications. Energies 2019, 12, 641. [Google Scholar] [CrossRef] [Green Version]
- Zhu, X.; Li, S.; Zheng, S.; Quan, L.; Fan, D.; Zeng, X.; Lee, C.H. Torque Component Redistribution and Enhancement for Hybrid Permanent Magnet Motor With Permanent Magnet Offset Placement. IEEE Trans. Transport. Electrific. 2023, 9, 631–641. [Google Scholar] [CrossRef]
- Pang, L.M.; Ishibuchi, H.; Shang, K. NSGA-II With Simple Modification Works Well on a Wide Variety of Many-Objective Problems. IEEE Access 2020, 8, 190240–190250. [Google Scholar] [CrossRef]
- Sanada, M.; Hiramoto, K.; Morimoto, S.; Takeda, Y. Torque Ripple Improvement for Synchronous Reluctance Motor Using an Asymmetric Flux Barrier Arrangement. IEEE Trans. Ind. Appl. 2004, 40, 1076–1082. [Google Scholar] [CrossRef]
- Ren, W.; Xu, Q.; Li, Q. Asymmetrical V-Shape Rotor Configuration of an Interior Permanent Magnet Machine for Improving Torque Characteristics. IEEE Trans. Magn. 2015, 51, 8113704. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Requirements | Units | Targets |
|---|---|---|
| Maximum power | kW | 70 |
| Maximum speed | r/min | 16,000 |
| Rated speed | r/min | 4500 |
| Maximum torque | Nm | 150 |
| Maximum phase current (rms) | A | ≤260 |
| Efficiency | - | ≥96% |
| Phase number | - | 3 |
| PM weight | kg | ≤1 |
| PM material | - | N38SH |
| Item | Flat | V | Delta | VV | U |
|---|---|---|---|---|---|
| Maximum d-axis Current (A) | 358.9 | 360.4 | 357.2 | 360.4 | 338.9 |
| Current angle (deg) | 77.5 | 78.6 | 76.3 | 78.6 | 67.2 |
| Peak torque (Nm) | 154.9 | 155.0 | 154.9 | 155.1 | 155.1 |
| No load d-axis inductance Ld (mH) | 1.2236 | 1.3058 | 1.2908 | 1.3529 | 1.4815 |
| No load q-axis inductance Lq (mH) | 2.3384 | 2.8729 | 2.7518 | 2.8255 | 2.8385 |
| Saliency ratio Lq − Ld | 1.1148 | 1.5671 | 1.461 | 1.44726 | 1.357 |
| Cogging torque (mNm) | 114.85 | 16.56 | 8.79 | 33.83 | 202.13 |
| Maximum efficiency | 98.48% | 98.42% | 98.52% | 98.52% | 98.32% |
| Efficiency ratio above 90% | 0.951 | 0.971 | 0.972 | 0.975 | 0.954 |
| Core loss at rated speed (W) | 146.2 | 71.1 | 90.3 | 76.7 | 143.2 |
| PM loss at rated speed (mW) | 29.70 | 2.53 | 12.38 | 4.83 | 18.65 |
| Critical speed at 400 Map (r/min) | 7350 | 11600 | 10550 | 13150 | 8500 |
| Mean value of demagnetization ratio (μ) | 0.694 | 0.060 | 0.339 | 0.258 | 0.345 |
| Standard deviation value of demagnetization ratio (σ) | 0.015 | 0.009 | 0.034 | 0.021 | 0.005 |
| Manufacturing cost of rotor sheet ($) | 1.41 | 1.17 | 2.25 | 2.6 | 2.13 |
| Parameters | Value | Parameters | Value |
|---|---|---|---|
| Slot depth Hs2 | 16.4 mm | Slot opening Bs0 | 0.9 mm |
| Slot width Bs1 | 3.7 mm | Slot bottom width Bs2 | 3.7 mm |
| Tooth tip height Hs0 | 0.8 mm | V pole angle Pa1 | 115 deg |
| V opening angle Va1 | 110 deg | V notch angle Na1 | 72 deg |
| V shift angle Sa | −2 deg | V outer bridge length Ol1 | 3.1 mm |
| V outer bridge width Ow1 | 1.4 mm | V center bridge length Cl1 | 4.7 mm |
| V center bridge width Cw1 | 2 mm | VV top pole angle Pa2 | 105 deg |
| VV top opening angle Va2 | 120 deg | VV top outer bridge length Ol2 | 2.4 mm |
| VV top outer bridge width Ow2 | 1 mm | VV top center bridge length Cl2 | 4.8 mm |
| VV top center bridge width Cw2 | 1 mm | VV low outer bridge length Ol3 | 2.4 mn |
| VV low outer bridge width Ow3 | 1.4 mm | VV low center bridge length Cl3 | 10 mm |
| VV low center bridge width Cw3 | 7 mm | VV low pole angle Pa3 | 158 deg |
| VV low opening angle Va3 | 90 deg | V notch angle Na2 | 88 deg |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ding, L.; Cheng, Y.; Zhao, T.; Yao, K.; Wang, Y.; Cui, S. Design and Optimization of an Asymmetric Rotor IPM Motor with High Demagnetization Prevention Capability and Robust Torque Performance. Energies 2023, 16, 3635. https://doi.org/10.3390/en16093635
Ding L, Cheng Y, Zhao T, Yao K, Wang Y, Cui S. Design and Optimization of an Asymmetric Rotor IPM Motor with High Demagnetization Prevention Capability and Robust Torque Performance. Energies. 2023; 16(9):3635. https://doi.org/10.3390/en16093635
Chicago/Turabian StyleDing, Ling, Yuan Cheng, Tianxu Zhao, Kai Yao, Yao Wang, and Shumei Cui. 2023. "Design and Optimization of an Asymmetric Rotor IPM Motor with High Demagnetization Prevention Capability and Robust Torque Performance" Energies 16, no. 9: 3635. https://doi.org/10.3390/en16093635