
Numerical Optimization on Aircraft Wake Vortex Decay Enhancement
 Ziming Xu and
Ziming Xu and  Dong Li*
Dong Li*- School of Aeronautics, Northwestern Polytechnical University, Xi’an, China
Blowing air at the end of the airport runway can accelerate the decay of the near-ground aircraft wake vortex, thereby reducing the negative impact of the vortex on the following aircraft. However, the benefits of accelerating wake dissipation vary for different blowing parameters, so it is necessary to set appropriate parameters in order to obtain better acceleration results. Because of the high cost of traditional optimization methods, this research uses a Kriging surrogate model to optimize the blowing parameters. The results show that the current optimization algorithm can deal with the global optimization problem well. After obtaining 205 sample points, the response surface model of the blowing parameters and blowing yield was accurately established. A relatively optimal parameter setting range was given, and numerical simulation shows that the current parameter setting can obtain improved benefits from accelerated vortex dissipation. In addition, since the optimization process is partially dimensionless, the above optimization results can be used to achieve multi-objective design, that is, the same set of blowing devices can efficiently accelerate the dissipative process of the tail vortices of different aircraft types, thus improving the engineering feasibility of the current blowing method.
Introduction
Wake Vortex Hazards
The lift of an aircraft originates from the interaction between the aircraft and the air. While the aircraft gains lift, the air will flow along the wing spanwise and form high-intensity aircraft wake vortices at the wingtips, which may lead to sudden lift loss or uncontrollable rolling for the trailing aircraft, with fatal effects. Due to the presence of the ground, the primary vortex induces secondary vortices, which have the opposite sign of vorticity and may drive the primary vortex rebound to the flight altitude [1]. Although the near-ground aircraft wake vortex pair will gradually move away from the flight path due to the induction of the mirror vortex, a crosswind with specific strength (e.g., when the height of the wake vortex is 1
In order to ensure the flight safety of civil aircraft, the existing measure is to control the flight distance between two adjacent approaching aircrafts. For instance, the International Civil Aviation Organization (ICAO) regulations ensure that when the preceding and following aircraft are heavy or medium types, the wake separation of the aircrafts should be 9.3 km [4], which corresponds to a time interval of more than 2 min. This method is certainly effective, but it also greatly restricts the growth of airport traffic, and when there are extremely unfavourable meteorological conditions for wake vortex dissipation, the current regulations still cannot guarantee the safety of the following aircraft.
Methods on Wake Alleviation
Researchers have proposed three methods for wake vortex control. The first method, Low-Vorticity-Vortex (LVV), reduces the induced roll moment on the following aircraft by redistributing the load of the preceding aircraft [5, 6]. The second method, the Quickly-Decaying-Vortex (QDV), seeks to trigger stronger instability for the vortex pair by exerting perturbations [7, 8] or by constructing a multi-vortex system [9–11]. Numerical simulations and wind tunnel experiments have proved such improvements effective, at least within ten times the wingspan of the aft fuselage [6]. However, both of these methods require modifications on aircrafts themselves, which might negatively affect the flight performance.
The third method hopes to accelerate vortex pair dissipation by applying perturbations to the wake vortices after their roll-up process. Cho et al. proposed to configure the relative positions of the preceding and following aircraft so that their wake vortices would interact and dissipate into harmless turbulence more quickly [12]. Nevertheless, this method is only suitable for vortices at a relatively high altitude and requires a precise prediction of the position of the preceding wake vortex. The acceleration of aircraft wake dissipation by ground-based equipment was first proposed by Kohl. His wind-tunnel experiments confirmed the effectiveness of these methods [13]. Stephan et al. quantitatively investigated the ground obstacles effects on in-ground-effect (IGE) wake vortex, with Large Eddy Simulation (LES) and towing tank experiments. They found that the hairpin vortices generated by ground obstacles entangle the primary and secondary vortices together, which ultimately advance the rapid decay to a large extent [14]. In addition, numerical simulations and field measurements have demonstrated that impressive acceleration results can still be obtained after simplifying the columnar obstacle into a flat plate array [15, 16]. In 2020, field experiments at Vienna International Airport further confirmed the effectiveness of this approach: the use of flat plate arrays reduced the wake vortex lifespan by 21%–35% [17]. But as the obstacles placed near the runway are large in size (
Present Study
To overcome the limitations of above methods, we investigated the effect of ground blowing on wake vortex dissipation. As an active flow control method, this strategy is able to reduce the lifespan of the IGE wake vortex without affecting flight safety. Numerical simulations indicated that although the direct effect of the blowing airflow on the vortices is limited, the starting vortex produced by the blowing air can develop into a hairpin vortex, inducing the interference between the primary and secondary vortices, and thus accelerating the wake dissipation [18]. Further, we have also investigated the blowing effect in crosswind conditions and screened for optimal blowing parameters [19].
Although increasing the blowing zone area and blowing velocity improves the blowing effect, maintaining a large flow rate consumes a huge amount of energy. With restrictions to the blowing flux and blowing zone area, a better choice—and the aim of this study—is to find a set of blowing zone parameters that can best enhance the wake decay through the blowing process. Since there is no analytical function between the blowing parameters and blowing effect, it is difficult to find an explicit optimal solution. On this basis, a surrogate model was adopted to approximate the relationship between blowing parameters and blowing effect. Different blowing aspect ratios and positions were tested. A rich number of sample points were used to establish the response surface, so that the optimal design of the blowing parameters could be estimated.
The structure of this paper is as follows: the first section introduces the research background; the second section introduces the numerical method adopted, the third section introduces and validates the surrogate optimization method; the fourth section demonstrates the optimization results; the fifth section presents the optimization settings for different aircraft types, and the final section is the summary.
Numerical Backgrounds
Turbulence Modelling
The numerical simulation in this paper was conducted by solving the incompressible Navier-Stokes equation. The finite volume method was used for spatial discretization. In order to capture the eddies in the flow, the Large Eddy Simulation (LES) method was used for turbulence modelling. The filtered incompressible Navier-Stokes equation can be written as Equations 1, 2:
where
The SIMPLE algorithm was used in the calculations to handle the pressure-velocity coupling, with both convective and diffusive terms discretized using the second-order central difference scheme. The unsteady term was advanced using the second-order implicit scheme.
Boundary and Initial Conditions
In this study, the wake vortices of two types aircraft were considered, and the parameters are listed in Table 1. The characteristic time and time were obtained by
TABLE 1

TABLE 1. Wake vortex parameters of A340 and A380.
Figure 1 shows the computational domain of the LES simulations (
FIGURE 1
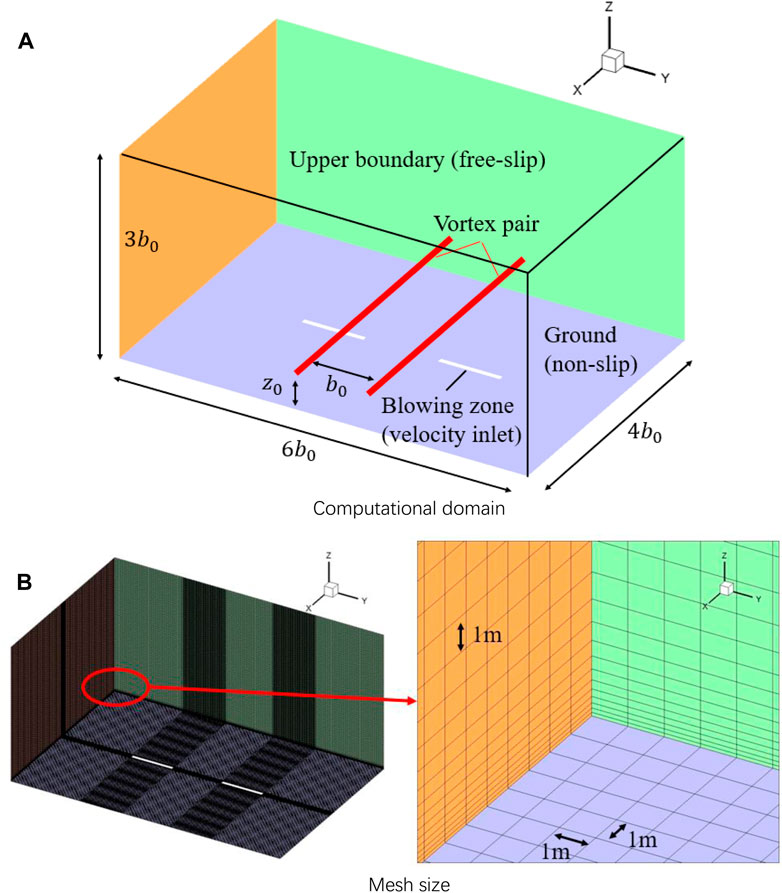
FIGURE 1. Schematic of the computational domain. (A) Computational domain, (B) Mesh size.
The height of the first layer of the mesh near the ground is 0.1 m (
The wake vortex pairs were initialised using the Lamb-Oseen model, which describes the velocity field as Equation 3:
Methods Validation
To validate the numerical methods, a numerical simulation was performed and the result was compared with the water-tank experiment data [14]. In the validation, the wake vortex of A340 was employed and the initial vortex height was reduced to
To evaluate the vortex strength decay history, the vortex centre was tracked by considering the local minimum pressure and the extreme vorticity values first. After that, the vortex circulation on a specify axial plane was obtained by Equation 4:
where
Figure 2 shows the comparison between the CFD result and the experimental data. Before
FIGURE 2
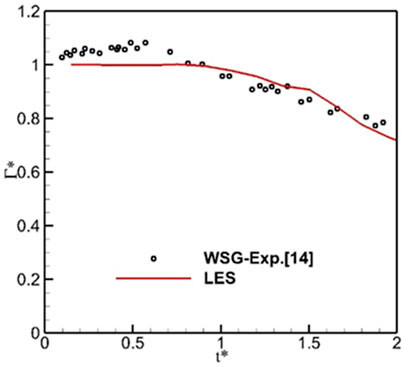
FIGURE 2. Vortex circulation evolution, CFD vs. Exp.
Optimization Method
Kriging Surrogate Model
Surrogate models, also known as response surface models, are approximate mathematical tools used as an alternative to complex numerical analysis, which reduce the difficulty of the optimization process. By learning from the sample data, the computer trains and fits a function mapping the relationship between the design parameters and the corresponding objective values that satisfy a certain accuracy range [21, 22]. The upper and lower bounds of the design variables
In the Kriging surrogate model, the actual function
The superscript
and
Infill-Sampling Criteria
A parallel infill-sampling criteria combing two criteria was used to better approximate the real function. The first criterion, minimizing surrogate prediction (MSP), selects the minimum of the objective function obtained by the current surrogate model as the new sample point [23, 24]. The MSP sub-optimization problem with constraints can be written as Equation 11
The second infill-sampling criteria, expected improvement (EI), is also known as the efficient global optimization algorithm [25]. The standard EI function can be written as Equation 12:
In this study, the gradient optimization is combined with the Kriging surrogate model to conduct the optimization process. To be specific, the optimization process consists of the following steps:
1) initial sample points are chosen with the Latin hypercube sampling method and the functional responses are evaluated by CFD solver;
2) initial surrogate models for the objective and constraint functions are constructed based on the current samples;
3) parallel infill-sampling criteria combing the EI and MSP criterion is conducted to obtain new sample points, and the corresponding response values are obtained using CFD;
4) the surrogate model is updated, and the sub-optimization process is performed based on it;
5) steps 3 and 4 are repeated until the termination condition is satisfied.
Benchmark Analytical Test Cases
To validate the above-mentioned optimization framework, three analytical test cases were used.
Rosenbrock Test Case
The Rosenbrock function has a minimum that lies in a “flat valley” (Figure 3C), around which the gradient value is small [24]. Thus, this case assessed the local optimization capability of the algorithm. The Rosenbrock function is expressed as Equation 13:
FIGURE 3
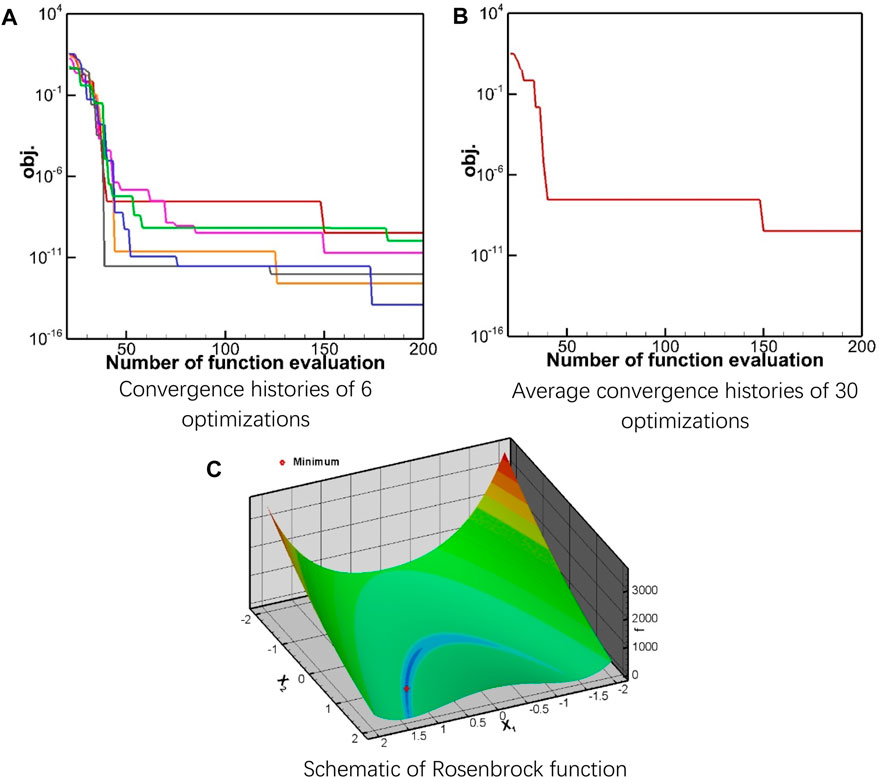
FIGURE 3. Rosenbrock function and the convergence history. (A) Convergence histories of 6 optimizations, (B) Average convergence histories of 30 optimizations, (C) Schematic of Rosenbrock function.
The optimization was performed 30 times and Figure 3 shows the convergence histories. In all calculations, when the number of the function evaluations (NFE) reaches 100, the predicted minimum of the function drops to the order of
Rastrigin Test Case
Rastrigin function is written as [22] Equation 14:
The optimal solution of the Rastrigin function is
FIGURE 4
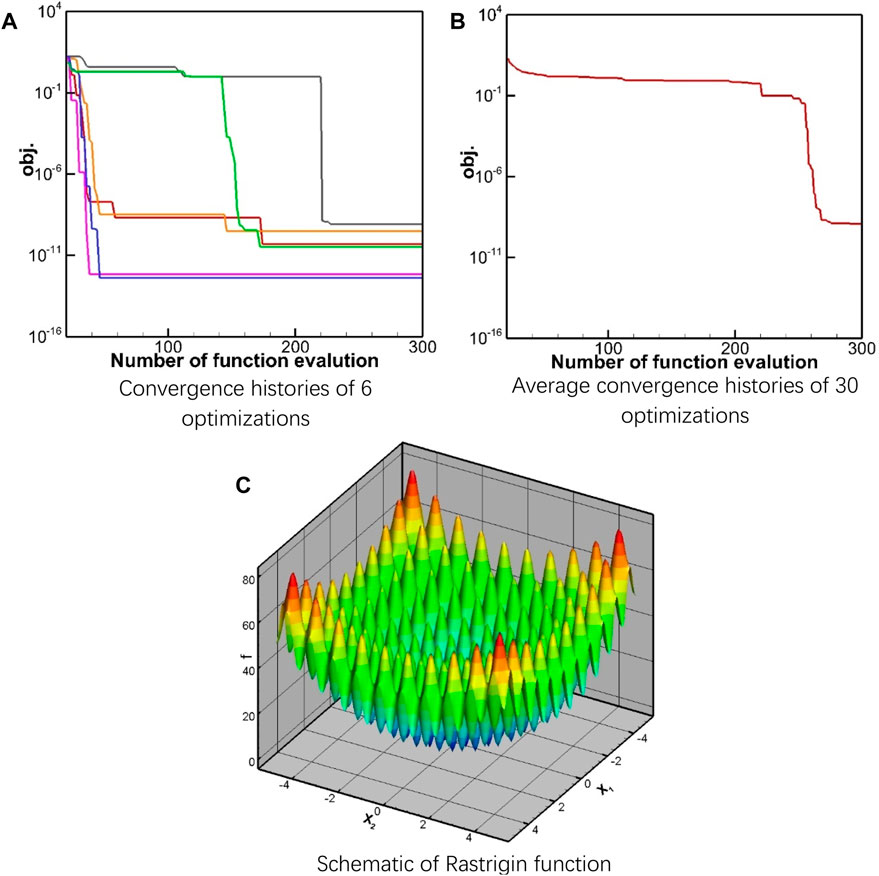
FIGURE 4. Rastrigin function and the convergence history. (A) Convergence histories of 6 optimizations, (B) Average convergence histories of 30 optimizations, (C) Schematic of Rastrigin function.
Constraint Handling Test Case
In this case, two constraints are applied. As shown in Figure 5C, the feasible region is a narrow interval between the constraints, and the minimum of the objective function lies approximately in the middle of the feasible region. The optimization problem is described as [25] Equation 15:
FIGURE 5
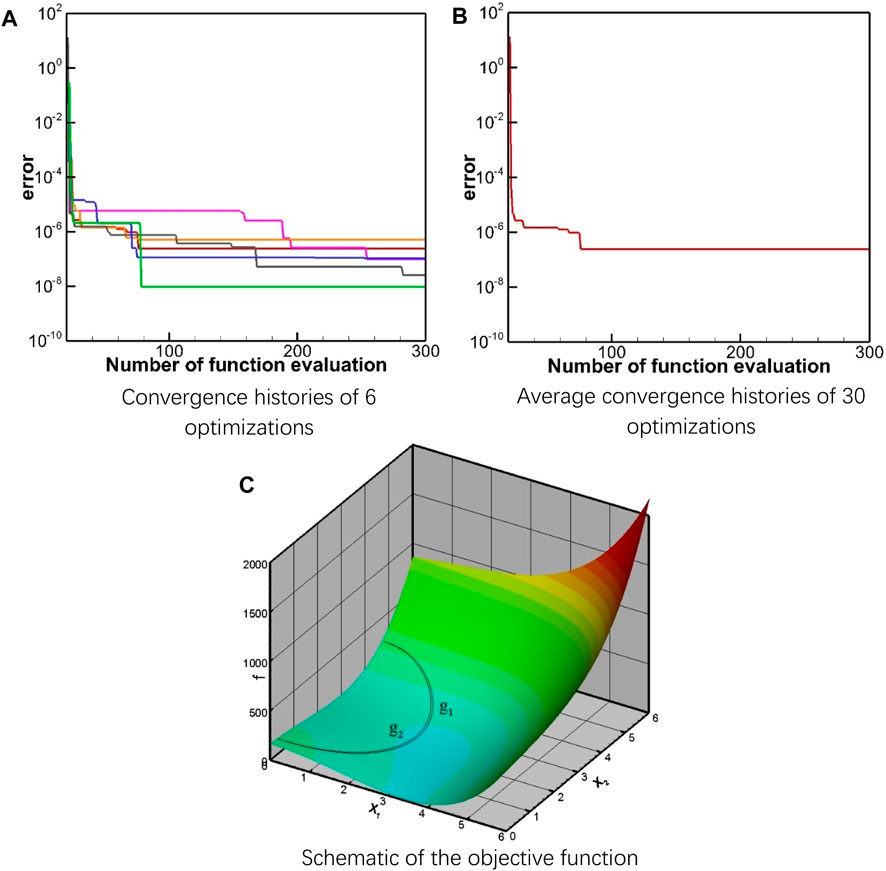
FIGURE 5. Function of test case 3 and the convergence history. (A) Convergence histories of 6 optimizations, (B) Average convergence histories of 30 optimizations, (C) Schematic of the objective function.
Before optimizing, it was checked to ensure that all the initial sample points lie within the feasible region. When using the logarithmic barrier method, the optimization problem can be rewritten as Equation 16:
where
In summary, the current algorithm combing the Kriging surrogate model and the gradient optimization method is able to deal with both constrained and unconstrainted problems, and will be used for the subsequent study.
Optimization for Enhanced Wake Vortex Decay
Before the optimization, the enhancement of wake vortex decay by active flow control method will be introduced briefly. Two rectangular blowing zones were equipped symmetrically about the runway central line, at the end of the runway. When air flows (blowing) vertically from the blowing zones, starting vortices are generated at the edges of the rectangular zones. At the same time, secondary vortices are induced and roll up inhomogeneously, due to the presence of the blowing air. Naturally, these vortical structures interact and develop into a hairpin like vortex (
The wake vortex of A340 is considered in this section, the detailed vortex parameters are listed in Table 1, and the initial vortex altitude is
Vortex circulation at an axial position is generally used to evaluate the vortex strength. However, instantaneous circulation is affected by many random factors and is unrepresentative for the entire wake decay process. Therefore, the vortex strengths at
Taking the case 1 in reference [19] as an example, as shown in Figure 6, the shadow area
FIGURE 6
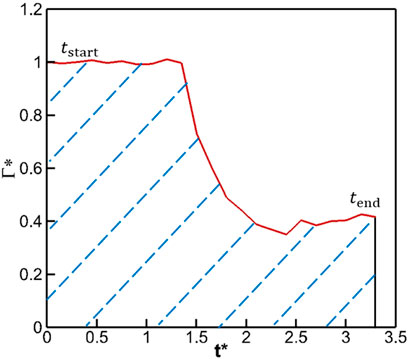
FIGURE 6. Circulation history of case 1 in reference [19].
During the simulation, the flow field data is logged at 4s interval, and thus, the objective function can be simplified as Equation 18:
where
FIGURE 7
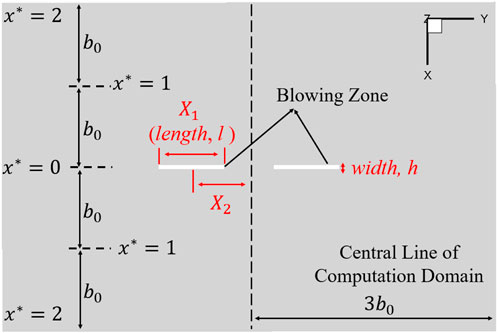
FIGURE 7. Definition of the optimization parameters (bottom of the computational domain).
It must be noted that the response value for every new sample point is evaluated by CFD, which may consume more than 20 h when using a 64 cores server. The automated process is as follows (Figure 8):
1) for a new sample point, the batch file is generated according to the input design parameters; then, the structured mesh is generated using the batch files in ICEM CFD;
2) the CFD simulation is conducted using ANSYS FLUENT, in which the .jou file controls the CFD simulation details such as timestep and turbulence modelling etc.;
3) the flow field information is extracted and post-processed using an in-house code to get the objective function value;
4) the new sample point parameter and corresponding objective function value is transferred to update the surrogate model;
5) another round of sample infilling is conducted if necessary.
FIGURE 8
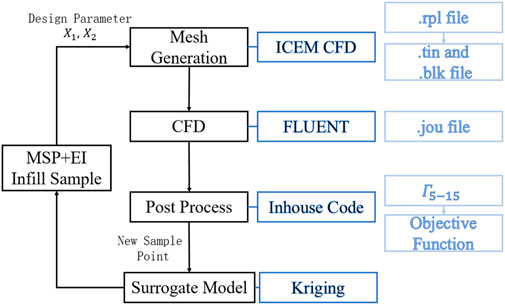
FIGURE 8. Processes for new sample evaluation.
Considering the high cost of the CFD, two termination conditions are employed:
1) the total number of samples exceeds 210 (
2) the error of the adjacent two iterations is smaller than
As shown in Figure 9A, the optimal design of the current problem is found at the 20th sample point, while none of the subsequent sample points show a significant decrease in the objective function value. The better designs are concentrated around obj. = 11. Nevertheless, as the number of sample points increases, the surrogate model gradually stabilizes, and the adjacent error of the optimal value found by the surrogate model exhibits an overall decreasing trend. At the end of the optimization, the adjacent decreases to the order of
FIGURE 9
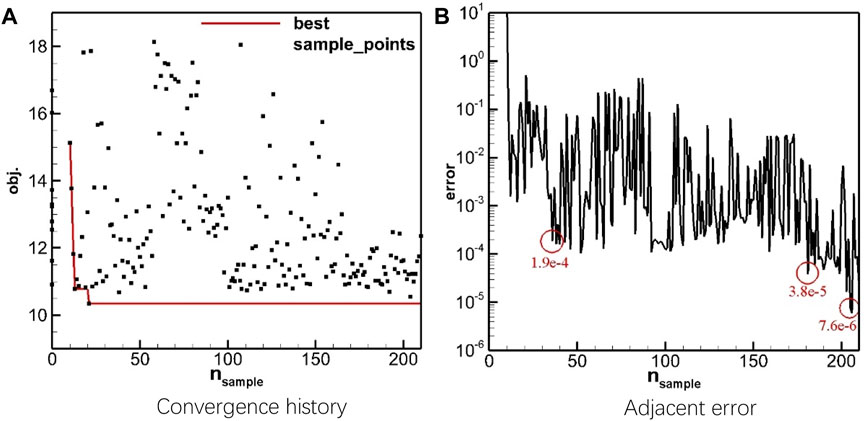
FIGURE 9. Convergence history of blowing zone optimization. (A) Convergence history, (B) Adjacent error.
Figure 10 illustrates the modelling when the error of the optimal value decreases to the order of
FIGURE 10
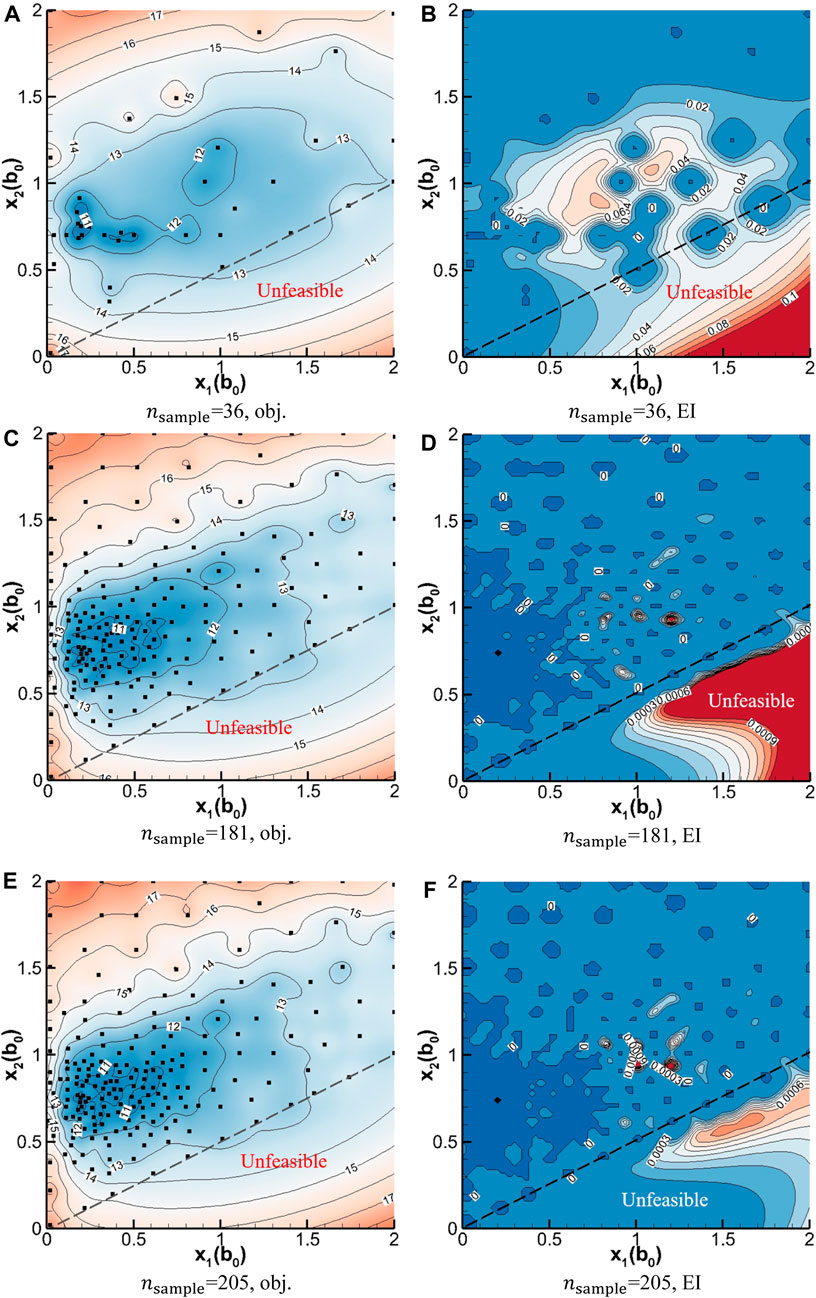
FIGURE 10. Response surface and EI contour. (A)
Figures 11–17 exhibit the vortex structures of two initial sample cases, four infilled sample cases, and the best performing sample case during the optimization. All the relative positions in the design space are shown in Figure 18, the design parameters are shown in Table 2, and the circulation decay histories are exhibited in Figure 19.
FIGURE 11
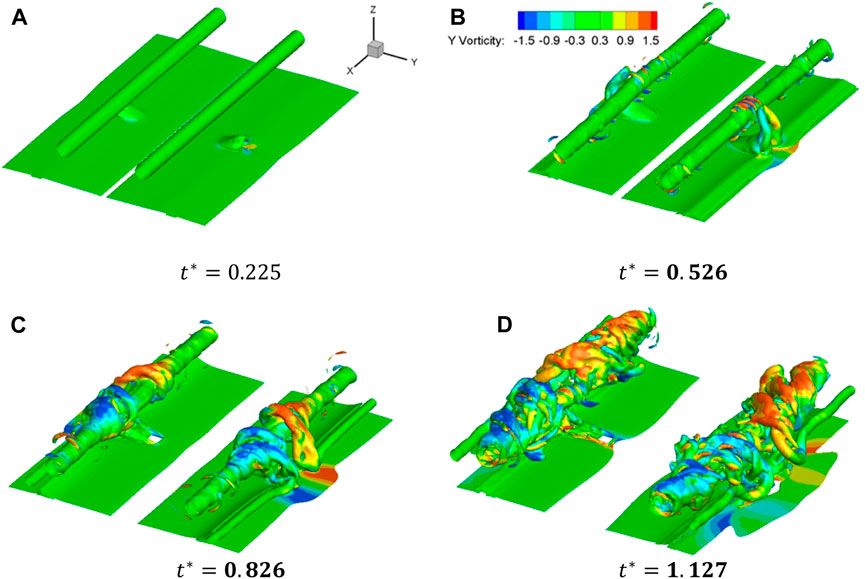
FIGURE 11. Structures of initial sample 1. (A)
FIGURE 12
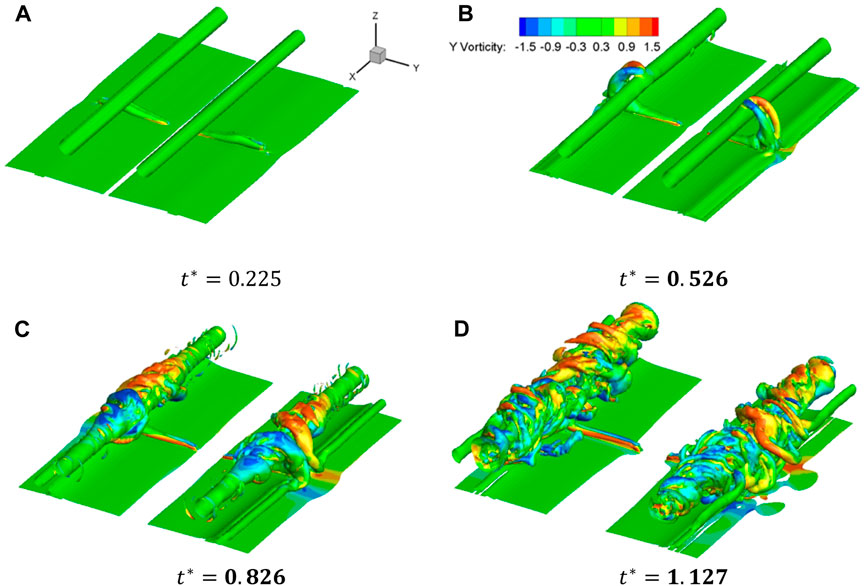
FIGURE 12. Structures of initial sample 2. (A)
FIGURE 13
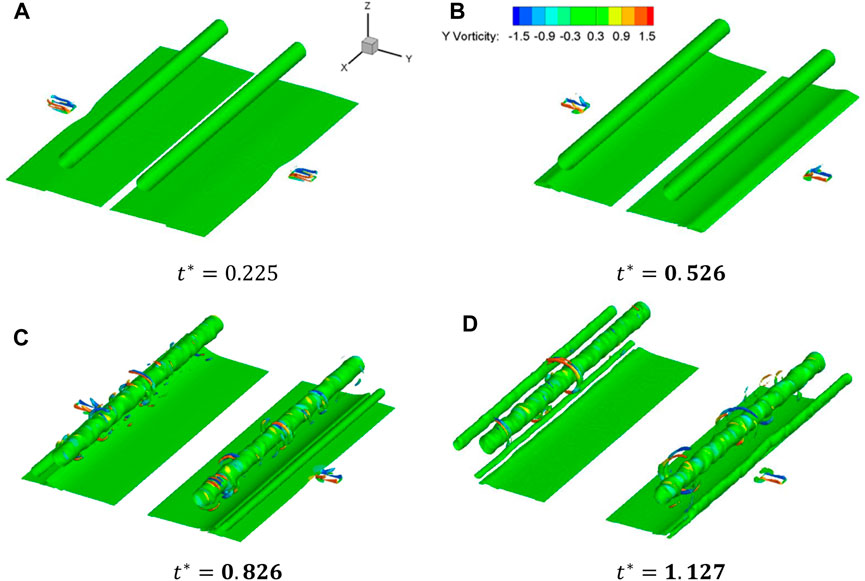
FIGURE 13. Structures of sample 70. (A)
FIGURE 14
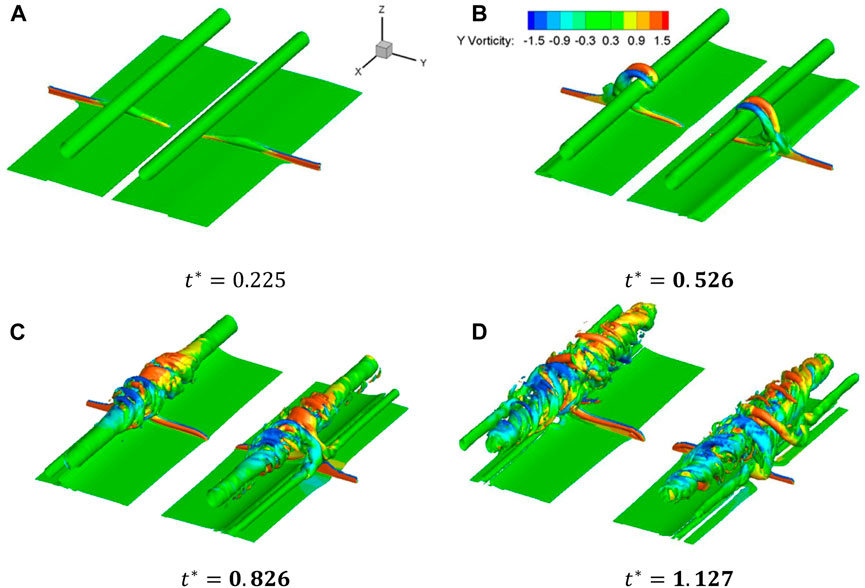
FIGURE 14. Structures of sample 73. (A)
FIGURE 15
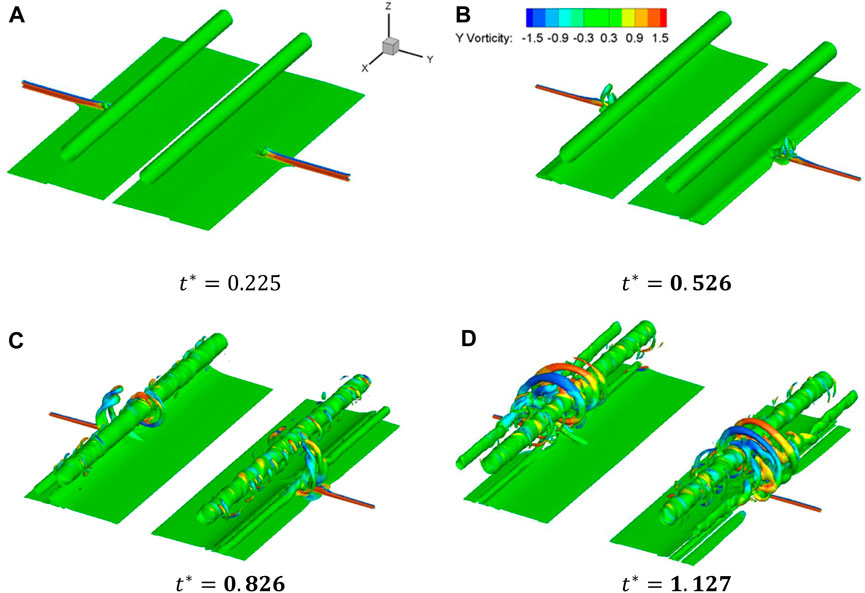
FIGURE 15. Structures of sample 76. (A)
FIGURE 16
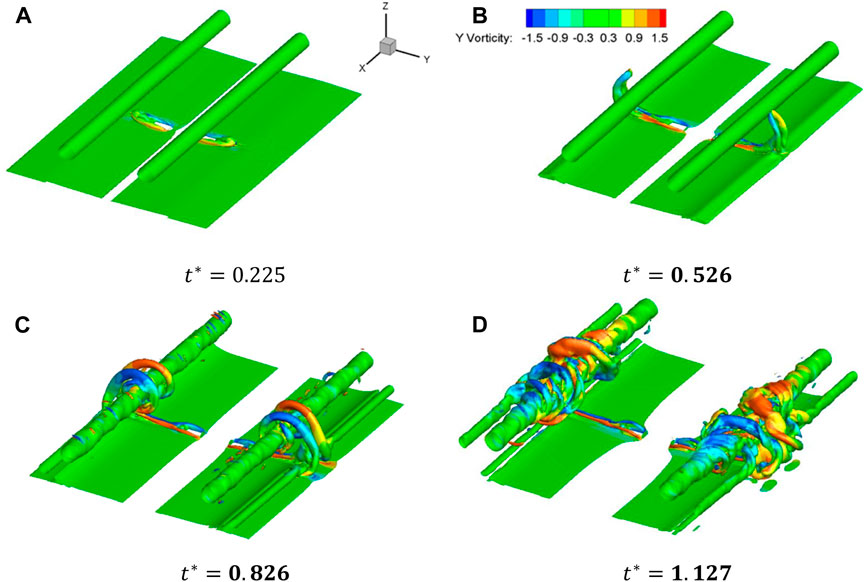
FIGURE 16. Structures of sample 150. (A)
FIGURE 17
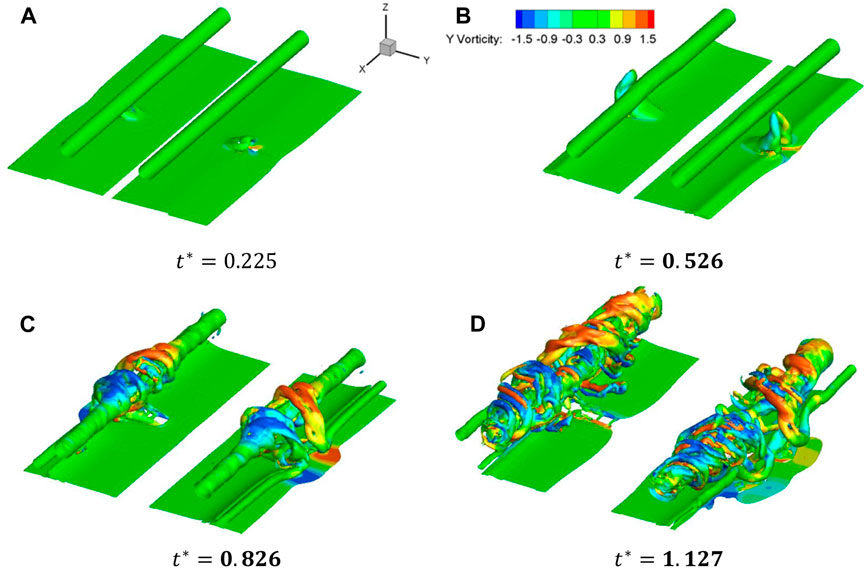
FIGURE 17. Structures of the optimal sample. (A)
FIGURE 18
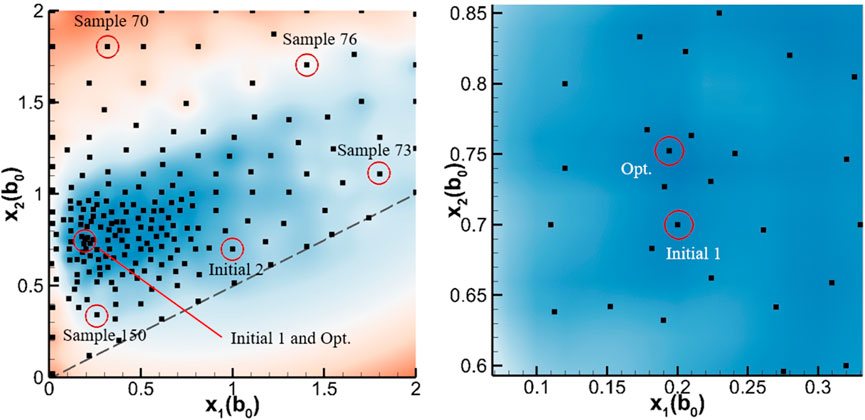
FIGURE 18. Samples to be demonstrated.
TABLE 2
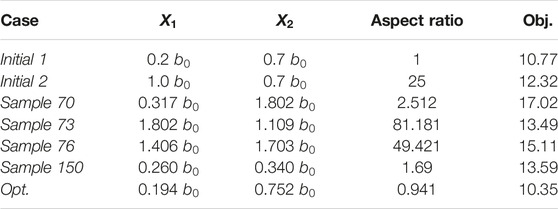
TABLE 2. Design parameters of initial samples and the best performing sample.
FIGURE 19
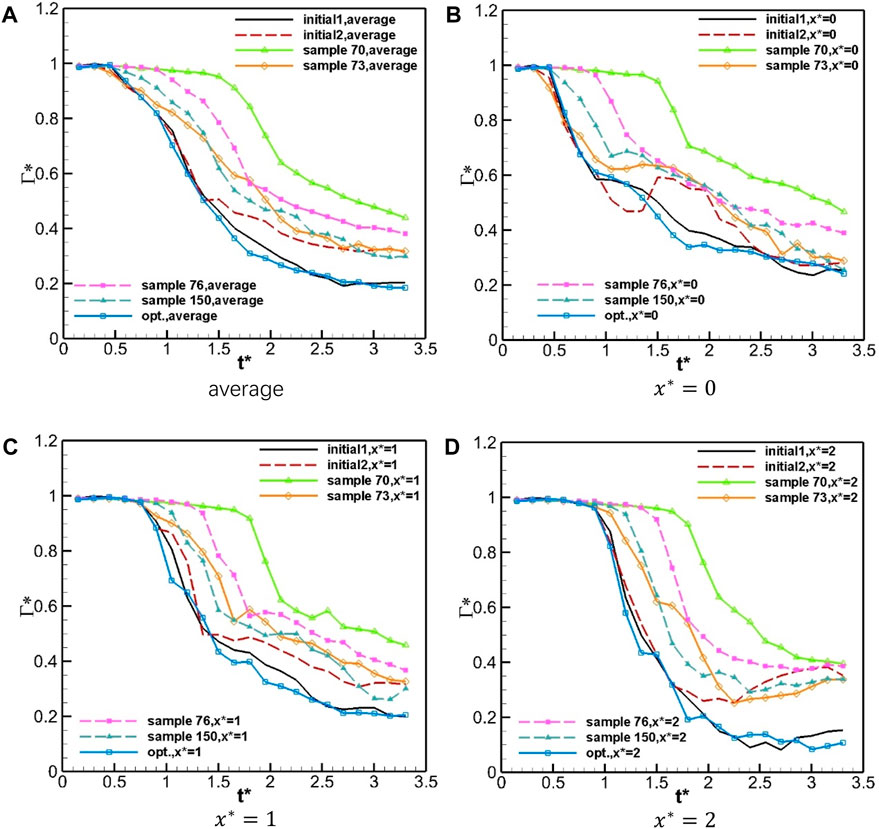
FIGURE 19. Circulation history at different axial positions (seven cases). (A) average, (B)
Take sample cases 76 and 150 as examples. The
The vortex structures in the two initial sample cases and the best performing case are similar. Considering the induced lateral movement of the IGE vortex, a large value of
Overall, the vortex evolutions in most cases are similar: a) the starting vortex generated by blowing air is raised by the blowing air and primary vortex induction b) the starting vortex evolves into a hairpin vortex (
Multi-Objective Design
The optimum blowing zone for an A340 wake vortex pair may not be enough to destroy the wake of a heavier aircraft, such as an A380, within a short period. Therefore, a better design could be obtained by overlapping the design space of two blowing zone types, which are for different aircraft wake decay enhancements, respectively. Taking the above optimization result as an example, Figure 10E can be dimensionalized using A340 and A380 parameters (Table 3). It is highlighted that the optimization process in the previous section is partially dimensionless. Since the initial vortex altitude of
1) for A380 (aircraft with larger span), the dimensionless initial altitude is less than that used in the optimization;
2) for A340 (aircraft with shorter span), the dimensionless blowing area is larger than that used in the optimization.
TABLE 3

TABLE 3. Parameters for different wake simulations.
These two facts ensure that the simulated blowing effect is not worse than that predicted by the surrogate model.
The design space is divided by the contour lines of the response surface (objective function), the value of the objective function inside the contour lines is smaller than that of the objective function on the contour lines. Figure 20 shows the contour lines on which the objective function equals 11.5. When the design parameters inside the blue contour line (
FIGURE 20
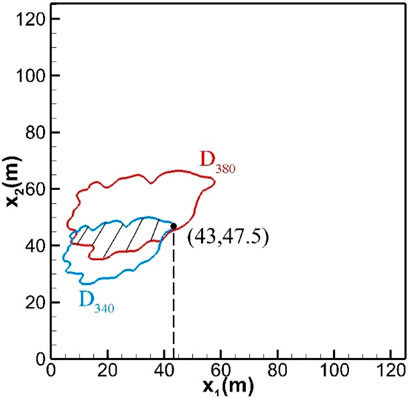
FIGURE 20. Design space of blowing zone for different aircraft wake vortex (Opt. < 11.5).
Two simulations are performed to validate the optimization results. For A340 and A380 wake vortex simulations, the same non-dimensional computation domain (
Figure 21 and Figure 22 show the wake vortex structures of A340 and A380 under the blowing effect. Due to the large initial circulation of the A380 wake vortex, the starting vortex experiences high induced velocity and is raised quickly. Figure 22B shows that a vortex loop is evolved from the
FIGURE 21
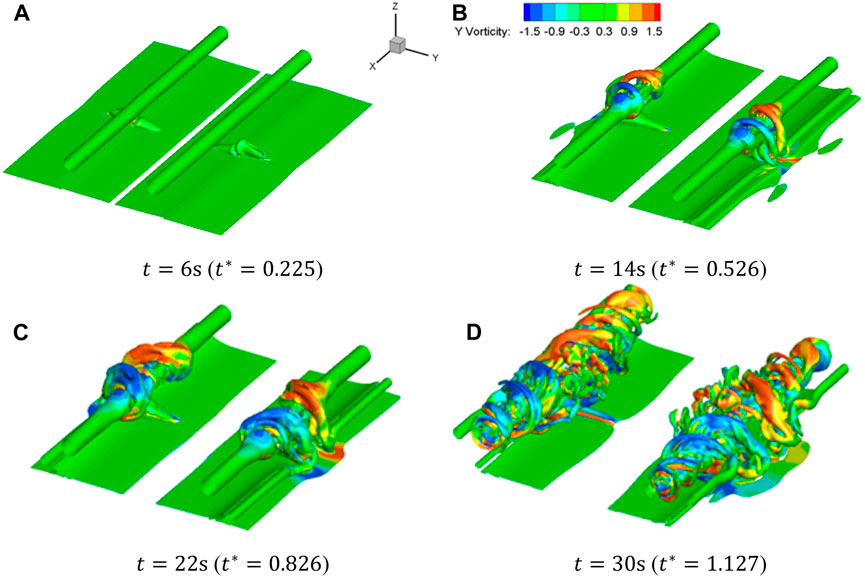
FIGURE 21. Structures of A340 wake vortex (coloured by y vorticity 1/s). (A)
FIGURE 22
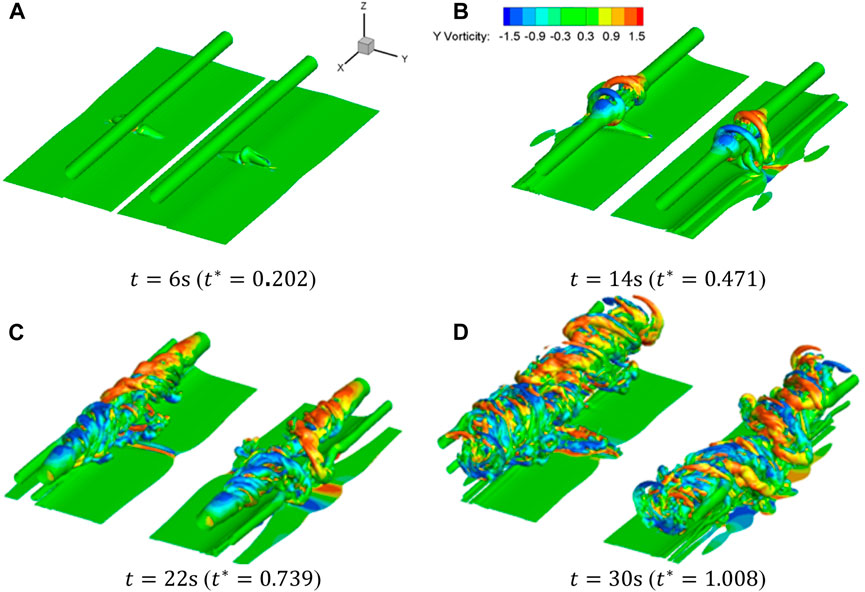
FIGURE 22. Structures of A380 wake vortex (coloured by y vorticity 1/s). (A)
Figure 23 shows the decay history of the A340 and A380 wake vortex with optimized blowing zones. Due to the interference of the starting vortex, the rapid decay of the A340 wake vortex is brought approximately 1.5
FIGURE 23
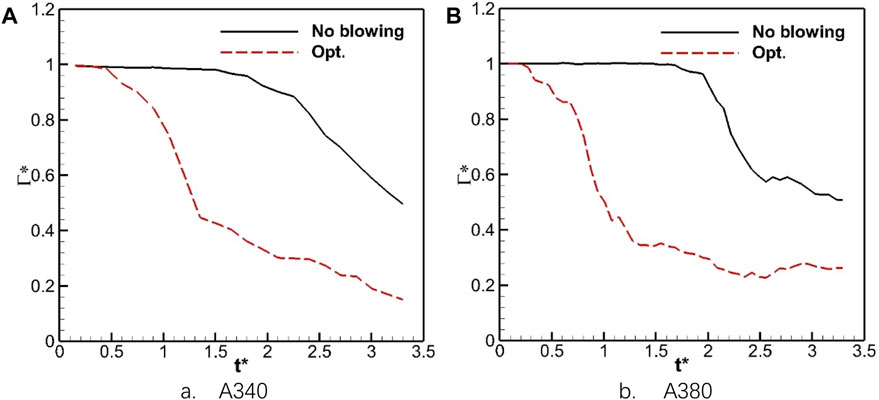
FIGURE 23. Averaged circulation histories for different aircraft wakes with optimized blowing zones. (A) A340, (B) A380.
Conclusion
In this paper, the Kriging surrogate model is used to help obtain a better design of the blowing zone for enhancement of wake vortex decay. By overlapping and comparing the design spaces for different wake vortices, a multi-objective design is realized, which improves the engineering feasibility of the current blowing method. The main findings are as follows:
1. The current optimization algorithm combing Kriging surrogate model and gradient optimization algorithm deal with the global optimization problems and constrained problems well;
2. The blowing effect is non-linearly related to the blowing zone aspect ratio and position. The blowing zone should not be too close to the centre of the computational domain and the blowing zone aspect ratio should be close to 1;
3. For the A340 wake vortex with an initial altitude of
4. By overlapping the design spaces, an optimized blowing zone, which enhances the decay of A340 and A380 wake vortex, is founded. Numerical simulation proves this blowing zone effective and reduces the objective function to 11.12 and 10.19 for the different wake vortices, respectively.
Data Availability Statement
The original contributions presented in the study are included in the article/Supplementary Material, further inquiries can be directed to the corresponding author.
Author Contributions
ZX (the first author) was responsible for numerical simulations, data processing and manuscript writing. DL (the second author) was responsible for the conceptual design of the study, funding support and the manuscript review. All authors contributed to the article and approved the submitted version.
Conflict of Interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
References
1. Gerz, T, Holzäpfel, F, and Darracq, D. Commercial Aircraft Wake Vortices. Prog Aerospace Sci (2002) 38(3):181–208. doi:10.1016/s0376-0421(02)00004-0
2. Holzäpfel, F, Tchipev, N, and Stephan, A. Wind Impact on Single Vortices and Counterrotating Vortex Pairs in Ground Proximity. Flow Turbulence and Combustion (2016) 97(3):829–48. doi:10.1007/s10494-016-9729-2
3. Xu, Z, Li, D, and Cai, J. Long-Wave Deformation of In-Ground-Effect Wake Vortex Under Crosswind Condition. Aerospace Sci Tech (2023) 142:108697. doi:10.1016/j.ast.2023.108697
4. ICAO. ICAO DOC 4444 Air Traffic Management - Procedures for Air Navigation Services (PANS-ATM). 16. Montréal, Quebec, Canada: ICAO (2016).
5. Holbrook, GT, Dunham, DM, and Greene, GC. Vortex Wake Alleviation Studies With a Variable Twist Wing. Technical Paper 2442. Hampton, Virginia, United States: NASA (1985).
6. Breitsamter, C. Wake Vortex Characteristics of Transport Aircraft. Prog Aerospace Sci (2011) 47(2):89–134. doi:10.1016/j.paerosci.2010.09.002
7. Ruhland, J, Heckmeier, FM, and Breitsamter, C. Experimental and Numerical Analysis of Wake Vortex Evolution Behind Transport Aircraft With Oscillating Flaps. Aerospace Sci Tech (2021) 119:107163. doi:10.1016/j.ast.2021.107163
8. Breitsamter, C, and Allen, A. Transport Aircraft Wake Influenced by Oscillating Winglet Flaps. J Aircraft (2009) 46(1):175–88. doi:10.2514/1.37307
9. Cheng, Z, Wu, Y, Xiang, Y, Liu, H, and Wang, FX. Benefits Comparison of Vortex Instability and Aerodynamic Performance From Different Split Winglet Configurations. Aerospace Sci Tech (2021) 119:107219. doi:10.1016/j.ast.2021.107219
10. Rennich, SC, and Lele, SK. Method for Accelerating the Destruction of Aircraft Wake Vortices. J Aircraft (1999) 36(2):398–404. doi:10.2514/2.2444
11. Stumpf, E. Study of Four-Vortex Aircraft Wakes and Layout of Corresponding Aircraft Configurations. J Aircraft (2005) 42(3):722–30. doi:10.2514/1.7806
12. Cho, J, Lee, BJ, Misaka, T, and Yee, K. Study on Decay Characteristics of Vertical Four-Vortex System for Increasing Airport Capacity. Aerospace Sci Tech (2020) 105:106017. doi:10.1016/j.ast.2020.106017
13. Kohl, RE. Model Experiments to Evaluate Vortex Dissipation Devices Proposed for Installation on or Near Aircraft Runways. Hampton, Virginia, United States: NASA (1973).
14. Stephan, A, Holzäpfel, F, Misaka, T, Geisler, R, and Konrath, R. Enhancement of Aircraft Wake Vortex Decay in Ground Proximity: Experiment Versus Simulation. CEAS Aeronaut J (2013) 5(2):109–25. doi:10.1007/s13272-013-0094-8
15. Holzäpfel, F, Stephan, A, Rotshteyn, G, Körner, S, Wildmann, N, Oswald, L, et al. Mitigating Wake Turbulence Risk During Final Approach Via Plate Lines. AIAA J (2021) 2021:59. doi:10.2514/6.2020-2835
16. Xu, Z, Li, D, An, B, and Pan, W. Enhancement of Wake Vortex Decay by Air Blowing From the Ground. Aerospace Sci Tech (2021) 118:107029. doi:10.1016/j.ast.2021.107029
17. Xu, Z, and Li, D. Enhanced Aircraft Wake Decay Under Crosswind Conditions. J Aircraft (2023) 60(5):1687–99. doi:10.2514/1.C037127
18. Misaka, T, Holzäpfel, F, Hennemann, I, Gerz, T, Manhart, M, and Schwertfirm, F. Vortex Bursting and Tracer Transport of a Counter-Rotating Vortex Pair. Phys Fluids (2012) 24(2):25104. doi:10.1063/1.3684990
19. Han, Z, Chen, J, Zhang, K, Xu, ZM, Zhu, Z, and Song, WP. Aerodynamic Shape Optimization of Natural-Laminar-Flow Wing Using Surrogate-Based Approach. AIAA J (2018) 56(7):2579–93. doi:10.2514/1.j056661
20. Han, Z. SURROOPT: A Generic Surrogate-Based Optimization Code for Aerodynamic and Multidisciplinary Design. In: 30th Congress of the International Council of the Aeronautic Sciences (2016).
21. Sasena, MJ, Papalambros, P, and Goovaerts, P. Exploration of Metamodeling Sampling Criteria for Constrained Global Optimization. Eng optimization (2002) 34(3):263–78. doi:10.1080/03052150211751
22. Parr, JM, Keane, AJ, Forrester, AIJ, and Holden, CM. Infill Sampling Criteria for Surrogate-Based Optimization With Constraint Handling. Eng optimization (2012) 44(10):1147–66. doi:10.1080/0305215x.2011.637556
23. Jones, DR, Schonlau, M, and Welch, WJ. Efficient Global Optimization of Expensive Black-Box Functions. J Glob optimization (1998) 13(4):455–92. doi:10.1023/a:1008306431147
24. Rosenbrock, HRH. An Automatic Method for Finding the Greatest or Least Value of a Function. Comp J (1960) 3(3):175–84. doi:10.1093/comjnl/3.3.175
Keywords: active flow control, aircraft wake vortex, multi-objective design, Kriging, CFD
Citation: Xu Z and Li D (2024) Numerical Optimization on Aircraft Wake Vortex Decay Enhancement. Aerosp. Res. Commun. 2:12444. doi: 10.3389/arc.2024.12444
Received: 19 November 2023; Accepted: 05 January 2024;
Published: 24 January 2024.
Copyright © 2024 Xu and Li. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Dong Li, ldgh@nwpu.edu.cn