TELKOMNIKA Telecommunication Computing Electronics and Control
Vol. 21, No. 2, April 2023, pp. 409 417
ISSN: 1693-6930, DOI: 10.12928/TELKOMNIKA.v21i2 22051

TELKOMNIKA Telecommunication Computing Electronics and Control
Vol. 21, No. 2, April 2023, pp. 409 417
ISSN: 1693-6930, DOI: 10.12928/TELKOMNIKA.v21i2 22051
Abdulla I. Abdulla, Ibrahim K. Mohammed Systems and Control Engineering Department, College of Electronics Engineering, Ninevah University, Mosul, Iraq
Article Info
Article history:
Received Oct 24, 2021
Revised Jul 07, 2022
Accepted Oct 26, 2022
Keywords:

Aircraft
Autopilot
Genetic algorithm
Longitudinal plane
LQG controller
Pitch control
Designing a robust aircraft control system used to achieve a good tracking performance and stable dynamic behavior against working disturbances problem has attracted attention of control engineers. In this paper, a pitch angle control system for aircraft is designed utilizing liner quadratic Gaussian (LQG) optimal controller technique with a numerical tuning algorithm method in the longitudinal plane through cruising stage. Main design approach of LQG controller includes obtaining best weighting matrices values using trial and error method that consumes effort and takes more time, in addition, there is no guarantees to obtain optimum values for weighting matrices elements. In this research, genetic algorithm (GA) is used to optimize the state and control weighting matrices and determine best values for their elements. The proposed traditional and optimized LQG pitch controller schemes are implemented utilizing Matlab simulation tool and their performance are presented and compared based on transient and steady state performance parameters. The simulation results reveal the ability of the optimized GA_LQG controller to reject the effect of the noises in the aircraft system dynamic and achieve a good and stable tracking performance compared with that of the conventional LQG pitch control system.
This is an open access article under the CC BY-SA license.
Corresponding Author:
Abdulla I. Abdulla Systems and Control Engineering Department, Colleage of Electronics Engineering
Ninevah University, Mosul, Iraq
Email: abdullah.abdullah@uoninevah.edu.iq
During the last decades, the performance of self-propelled aircraft systems, which were established by Wright brothers at 1903, have been improved due to the fast development in flight aerodynamics and fabrication technology of light weight motors and propellers beside design robust flight control systems. These developments have enhanced the role of aircraft to serve users in the military, commercial and space research fields [1]. In the modern aircrafts, a variety of automatic optimal control systems are adopted to support the flight performance of the planes through helping the pilot in navigation process, flight controlling and maintain the stability feature of the aircraft [2].
After many decades of developments, airplanes soon adapted the performance approach of autopilot by which it can achieve some missions of the flight crew during the long navigation journey. It allows the airplane to fly and navigate autonomously without taking action from pilot, hence greatly decreasing the pilot’s workload. In this research, an autopilot control system is designed to stabilize the pitch angle of airplane, which can be adopted for guiding the plane to reduce pilot’s tasks during flying and landing stages
The elevator is called longitudinal controls, which is used to enable the control process of the lift angle in the longitudinal plane. By translating the elevator forward, the rear of the stabilator moves forwards, the elevator turns downwards and the tail of the fuselage provided by a positive hump leading in a rising force, which
Journal homepage: http://telkomnika.uad.ac.id
produces a pitch up and pitch down of the tail and the aircraft body respectively. Similarly, when the elevator moves backward, the elevator rear turns upwards and the plane tail is provided by a negative camber that causes to a descendent force, which leads the tail to drop down and the plane to lift [3], [4].
Generally, there are two types of controller techniques, which are conventional controller and optimal controller that can be adopted to develop the tracking performance of dynamic control systems. The traditional proportional-integral-derivative (PID) controllers can be efficiently applied to control various simple dynamical systems with single-input single-output (SISO) [5], while the complex dynamic systems with multi-input multi-output (MIMO) should be controlled using optimal controller approaches like linear quadratic regulator (LQR) and liner quadratic Gaussian (LQG) controller. Aircraft systems have a complex dynamic behaviors and stabilization of these systems needs apply robust optimal controller techniques. Classic and hybrid LQR controller approaches have been applied successfully for stabilization of many complex MIMO systems in various applications [6]-[9]. However, using LQR controller approach is valid just for noiseless systems. Practically, almost of simple and complex systems are subject to process noise and measurement noise In this regard, stabilization of aircraft schemes, which are under action of working disturbances, requires applying more powerful and robust controller systems. LQG controller, which is a combination of LQR and Kalman filter (KF), is the controller technique that can be adopted to control systems with noises.
During the last decades, more control approaches have been proposed by researchers for stabilization of aircraft systems. In [10]-[13] proposed an aircraft control system using classic controller techniques. They presented conventional PID controller and fuzzy PID controller to control pitch angle of aircraft system. A comparative assessment between the two techniques is introduced based on time response characteristics of the system performance. However, the parameters of the PID controller are not tuned based on numerical algorithms, they are tuned using classic fuzzy logic approach. Fuzzy logic and optimal LQR controller have been utilized in [11]-[13] to stabilize roll and pitch angles of the autopilot system. The simulation results are demonstrated and compared based on time domain performance parameters. The simulated tracking response of the system showed that the LQR controller can gives best performance compared with the fuzzylogic controller.
Chrif and Kadda [14] proposed optimal control system based on LQR and LQG controllers to control pitch, roll and sideslip angles of aircraft system. Based on variation in the system parameters, the LQG controller equipped with Kalman filter have been used to control the aircraft scheme. The two controllers are simulated and their response is presented. The simulation results showed the controllers are able to give an acceptable tracking performance for the desired input. However, the response of the system could be better if the controllers are optimized using numerical tuning algorithms.
In 2018, Johari et al. [15] introduce a study in improvement of the pitch angle motion control for airplane systems. They used three controller techniques, PID, fuzzy logic (FL) and LQR, to improve the stability of the aircraft system in pitch motion case. The dynamic longitudinal of the aircraft is modeled mathematically and a collection of PID, FL, and LQR controllers are designed to control pitch angle and maintain it at desired reference. The controllers are simulated using Matlab environment and their time response are shown then compared according to transient and steady state performance parameters. A single controller alone is unable to stabilize the aircraft scheme under disturbances such as weather conditions according to simulation results. on the other hand, the combination of both PID and LQR controllers succeeded to force the pitch angle of the airplane to follow the reference trajectory properly. However, the controllers design is not optimized utilizing optimization algorithms. Ahmed et al. [16] presented a classic PID controller and optimal LQR controller to control longitudinal and lateral motion in F-16 airplane system. A complete mathematical modeling of the system using Newton-Euler formulas. The nonlinear model of the aircraft scheme is linearized around equilibrium points to enable apply their linear control systems to stabilize roll and pitch angles. The roll and pitch aircraft control system based on PID and LQR techniques are simulated using Matlab/ Simulink environment. A comparative between the simulation results of the two controllers is achieved based on time-domain performance elements. The simulation results reveal the impact of the both controllers in control process of aircraft roll and pitch angles. However, the performance of the controllers is not assessed under action of working disturbances. Moreover, manual tuning has been used to tune the gain parameters of the controllers using the trial-and-error method, which does not guarantee producing best output response.
In 2020, Jami’ín [17] presented a cascaded optimal LQG controller to control pitch angle of automatic landing system in airplane. The proposed LQG controller is adopted to track the desired trajectory path of airplane for landing system in presence of disturbances. The Kalman filter with pole placement technique are used to reject the noise and stabilize the system. The proposed cascaded LQG controller is simulated and its response is introduced. The Matlab results revealed the capability of the presented control approach to stabilize the airplane system effectively. However, the tracking performance of the proposed LQG controller would be better if its gain parameters are tuned numerically using one of the optimization algorithms.
The controller systems in the previous works are not optimum as some of these systems are implemented using classic controller techniques like PID and fuzzy logic, which are considered not suitable enough for complex dynamic aircraft systems. Furthermore, the LQR and LQG gain parameters in other presented systems, are not tuned using optimization algorithms. The tuning process is achieved using trial and error method, which consumes effort, takes too much time and does not guarantee achieving optimum response. Moreover, most of the presented researches did not take into consideration acting of the disturbances noises on the aircraft’s plant. In this regard, this research presents an optimal control system using LQG controller for aircraft system with disturbances The controller is adopted to stabilize pitch angle of airplane system in presence of process and measurement noises. The LQG gain parameters are optimized using genetic algorithm, which is employed to obtain best elements values for its weighting matrices.
In this study, the drawbacks of the presented control systems are avoided through applying an optimized LQG optimal controller to stabilize pitch axis of aircraft system with disturbances. In typically, LQG is a simply combination of a Kalman filter with a LQR controller. The Kalman filter, which is also called linear quadratic estimator (LQE), is not only uses for noise reduction that could effect on the system’s performance but also to provide a state’s estimation for non-measurable systems. In simulation, in order to consider disturbances in the systems, noise sources blocks should be included into the simulated schemes. In Mohammed et al [5] a limited-band white noise block is included into the system plant to include the effect of the process noise in the system, while Gaussian noise block is added into the system output to consider influence of the measurement noise on the system.
In this application, it is assumed that all the aircraft states are controllable and observable, so the main function of the Kaman filter is just to reduce the influence of the process and measurement disturbances in the dynamic behavior of the flight system. The main problem of LQG controller design is determine optimum values for the elements of Q and R weighting matrices elements of the LQR controller that used to minimize the performance index of the system. Verification process is traditionally done by trial and error method that considers a difficult process and does not guarantee finding optimal parameters. In this paper, the optimized genetic algorithm (GA) method was used to help designers to overcome tuning problem and ensure an optimal solution for the control scheme. The control system of the roll axis in the flight system with disturbances is implemented utilizing Matlab/Simulink tool to evaluate the performance of the presented LQG stabilizing system.
The rest of paper is organized as: mathematical model of the system dynamic of is given in section 2. Section 3 introduces theory of the LQG controller technique. Genetic algorithm tuning method background and LQG pitch controller design are presented in section 4. Simulation results of the proposed pitch control system are presented in section 5, followed by concluding remarks and future works that are given in section 6.
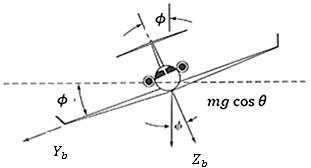
The dynamic behavior of an airplane is governed by a scheme of six nonlinear differential equations. Based on certain assumptions, these complex differential equations can be decoupled and linearized into the longitudinal and lateral mathematical expressions. Pitch control is a lateral problem, which in this research has been developed to control the aircraft pitch angle so that it can achieve a stable pitching motion. Schematic diagram of aerodynamic controls for the aircraft pitch and roll angles are shown in Figure 1(a) and Figure 1(b) respectively. Where ����, ���� and ���� denote the force components of aerodynamics control and ��, �� and ���� represent the pitch angle, roll angle and aileron deflection angle of the aircraft system respectively [7], [18].
To design a pitch angle control system for an aircraft, it is required to deal with the motion equations in the only longitudinal plane. The pitching motion in the longitudinal plane of the flight system composes of these movements where the airplane would only transfer within the �� �� plane that is, the movement field of the aircraft is in the directionof the ��-axis and ��-axis and rotation about the ��-axis based on the given two assumptions:
At constant altitude and velocity conditions, the airplane is steady state cruise.
Variation in the pitch angle of the aircraft system does not vary the velocity of the airplane under any working condition.
The transfer function of changing in both pitch angle and elevator deflection is derived by (1) and the state space form is shown in (2) and (3) [18], [19].
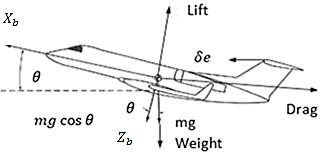
LQG technique is a modern state feedback controller technique used for designing high efficient regulation and tracking systems. It is basiclly a combination of LQR controller and a Kalman filter. In order to design an optimal control system based on state feedback LQG controller technique, the flight system must be formulated ina state space form. The blockdiagram ofthe LQG controller system is shown in Figure 2 [20], [21].
To design LQR controller, it is crucial that all the system states are measurable and observable. Consider a flight system affected by noise with the following state space representation [21]-[23]
�� =����+����+�� (4) �� =����+�� (5)
Where �� and �� are process and measurement covariance noise matrices respectively, which are represented in system simulation as zero white noise with heterogeneity ��(������)=��, and ��(������)=��. The optimal Kalman gain matrix (��) is:
�� =�������� 1 (6)
Where �� is calculated from the solution of the following Riccati equation with known ��, ��, �� and �� matrices
����+������ �������� 1 ����+�� =0 (7)
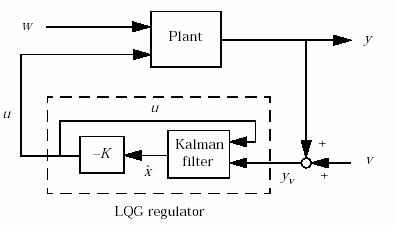
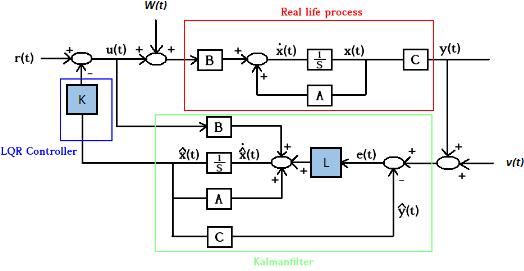
The block diagram of the noisy plant utilizing the Kalman filter is presented in Figure 3. By combining LQR with KF, the control effort equation of the LQG controller for pitch control system can be written:
�� = ����̂+�� (8)
Where �� ̂ is the estimated states vector and �� is the reference entries for the system. This control entry is employed to minimize the following performance [24]-[26]
A pre-gain (��) unit must be included to the pitch closed-loop control system if its output response shows steady state error in order to improve the regulation and tracking performance of the LQR controller. The pre-gain (��) parameter shown in Figure 4 can be determined by the mathematical expression given in (10) and in “m.file” code by the defined Matlab function, �� =��������������(��,��,��,��,��) [19], [27], [28].
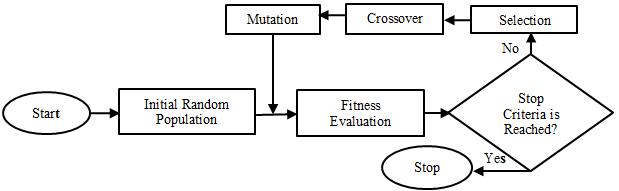
GA is chosen as the optimizing method of LQG controller. It is a stochastic comprehensive numerical search approach that can serve for solving nonlinear and nonconvex control problems. GA, which was developed by John Holand and his cooperators 1960s and 1970s, is based on the process of biological evaluation and mimics the procedure of natural selection. The genetic tuning method starts with the process of selecting real numbers assortment chromosomes, which serve as an initial population. During an optimization process, populations of the chromosomes are iteratively manipulated by GA using reproduction, crossover and mutation operations, then each solution can be validated using a fitness function [29], [30].
Flowchart for optimizing LQG controller based on genetic algorithm is shown in Figure 5. Optimization process shows that the optimized GA-LQG controller begins with random values chromosomes in each individual, the genes in each chromosome represent the elements values of the matrices Q and R as described in Figure 6. By choosing optimum values for LQG controller gain elements (��11, ��22, ��33, ��) a better output response can be achieved for the system which leads to minimization of performance criteria in the time domain including the rise time (����), settling time (����), maximum overshoot (%����), and steady-state error (������). It is known in the design process, the objective fitness function (��) is formulated by the designer based on the required specifications of the system, which comprise rise time (����), settling time (����), maximum overshoot (%����) and steady state error (������). In this paper, the proposed fitness function used in the optimization process of GA-LQG controller parameters is defined:
�� =1 exp( 0.5)(���� +������)+exp( 0.5)(���� ����) (11)




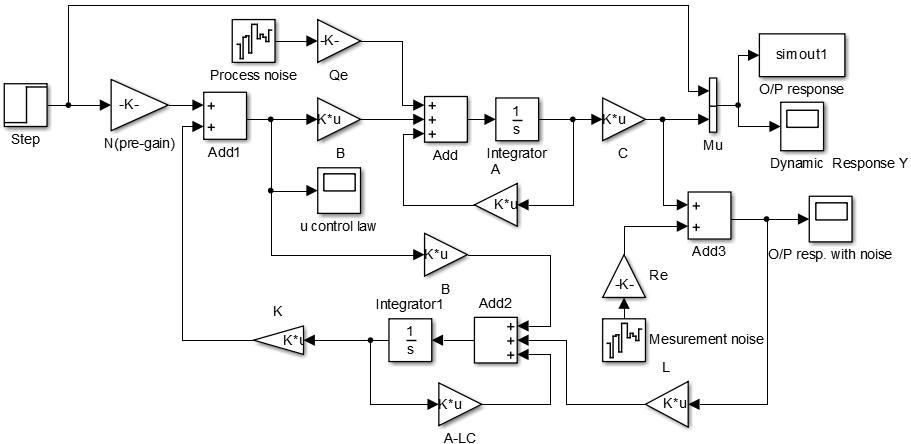
In this study, the Simulink model of noisy aircraft system based on the LQG controller is shown in Figure 7. The process noise and measurement noise are added to the schematic diagram to support the reliability of the system modeling. Table 1 shows the parameters of the GA optimization method, which are considered in tuning process of the LQG controller gain elements
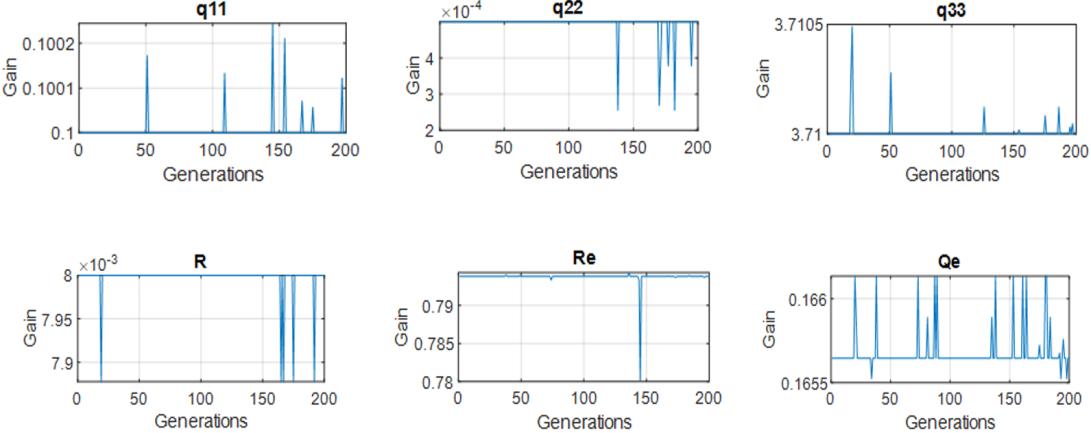
In this application, an optimized GA-LQG controller is designed to stabilize the pitch angle of an aircraft system. The GA-LQG controller is simulated using Matlab software and its output response are included and then discussed. The iteration curves that show the convergence process of gain element of �� and �� weighting matrices to the optimum values are presented in Figure 8. Based on the GA tuning method with parameters listed in Table 2, the optimized values of the weighting matrices for LQR controller and estimator (
�� , ���� ) are given:
,
Based on the optimized �� and �� weigthing matrices, the gain matrix of the LQR controller is calculated by using the Matlab instruction, �� =������(��,��,��,��). The solution of Ricatti equation is given by:
The closed-loop poles of the aircraft LQG control system are given by: [-2.8185 + i1.9852, -2.8185 – i1.9852, -1.8120], and the feedback LQR gain matrix is: �� = [2.4819 9.1578 21.5349]. While the gain matrix of observer is calculated based on the optimized weighting matrices ���� and ���� using the Matlab instruction, �� =������������(��,��,����,����), its value is: �� =[ 00143,0084,0051]��
The pre-gain �� of the LQG controller system is calculated based on (10) and its value is �� =0.9531 The time response of the aircraft system with an initial pitch angle of 0.15 radian (8.625 degree) using LQG controller is shown in Figure 9. It can be seen from the system response that the controller succeeded in forcing the noisy aircraft output state to follow the desired pitch angle trajectory effectively.
The control law response of the pitch angle control system based on the GA-LQG controller is shown in Figure 10. It is clear from Figure 10 that the control effort of the proposed LQG controller required to guide the pitch angle through the desired input trajectory is within reasonable values range. Using the optimized GA-LQG controller, Table 2 shows the specifications of time response for the aircraft pitch angle stabilization. Based on the aforementioned Table, a good and fast transient response with minimal steady-state error has been achieved by using the proposed LQG controller based on GA tuning method.
In this paper, an optimal control system was proposed to control pitch angle of a reliable model of aircraft system. Two types of noises, which are process noise and measurement noise, are considered in the modeling of the dynamic behavior for the aircraft system. The proposed control system was based on the state feedback LQG controller technique. The LQG controller has been optimized by using the GA tuning approach,
ISSN: 1693-6930
which was used to obtain optimum values for the LQG controller parameters. The optimized GA-LQG controller has been designed to control pitch angle of the aircraft system. The presented control system was simulated using Matlab/Simulink environment to evaluate the transient and steady state responses of the proposed GA-LQG controller system. The simulation results reveal the effectiveness of the proposed LQG controller in rejecting the noises effect in the performance of the aircraft system and controlling its pitch angle efficiently. In prospective research, a robust adaptive controller system will be considered for stabilization of aircraft roll, pitch and sideslip angles.
[1] A. B. Kisabo, F. A. Agboola, C. A. Osheku, M. A. L. Adetoro, and A. A. Funmilayo, “Pitch Control of an Aircraft Using Artificial Intelligence,” Journal of Scientific Research and Reports, vol. 1, no. 1, pp. 1-16, 2012, doi: 10.9734/JSRR/2012/2008
[2] R. Lungu, M. Lungu and L. T. Grigorie, “Automatic Control of Aircraft in longitudinal plane during landing,” IEEE Transactions on Aerospace and Electronic Systems, vol. 49, no. 2, pp. 1338-1350, 2013, doi: 10.1109/TAES.2013.6494418.
[3] W. Mackunis, P. M. Patre, M. K. Kaiser, and W. E. Dixon, “Asymptotic tracking for aircraft via robust and adaptive dynamic inversion methods,” IEEE Transactions on Control Systems Technology,vol.18,no.6,pp.1448-1456,2010,doi:10.1109/TCST.2009.2039572
[4] Y. Xu, “Multi-Timescale nonlinear robust control for a miniature helicopter,” in 2008 American Control Conference, 2008, pp. 2546-2551, doi: 10.1109/ACC.2008.4586874
[5]
[6]
I. Mohammed, B. Sharif, and J. Neasham, “Design and implementation of a magnetic levitation for robotically actuated capsule endoscopes,” in 2012 IEEE International Symposium on Robotic and Sensors Environments Proceedings, 2012, pp. 7-12, doi: 10.1109/ROSE.2012.6402614.
I. K. Mohammed, B. S. Sharif, J. Neasham, and D. Giaouris, “Novel MIMO 4-DOF position control for capsule endoscope,” in 2011 IEEE International Symposium of Circuits and Systems (ISCAS), 2011, pp. 909-912, doi: 10.1109/ISCAS.2011.5937714
[7] A. I. Abdulla, I. K. Mohammed, and A. M. Jasim, “Roll Control System Design Using Auto Tuning LQR Technique,” International Journal of Engineering and Innovative Technology, vol. 7, no. 1, pp. 10-17, 2017. [Online]. Available: https://www.ijeit.com/Vol%207/Issue%201/IJEIT1412201707_02.pdf
[8] I. K. Mohammed and A. I. Abdulla, “Elevation, pitch and travel axis stabilization of 3DOF helicopter with hybrid control system by GALQR based PID controller,” International Journal of Electrical and Computer Engineering (IJECE), vol. 10, no. 2, pp. 1868-1884, 2020, doi:10.11591/ijece.v10i2.pp1868-1884
[9] I. K. Mohammed, “Design and Simulation of Three Degrees-of-Freedom Tracking Systems for Capsule Endoscope,” ASME Journal of Dynamic Systems, Measurement and Control, vol. 138, no. 11, doi: 10.1115/1.4033830.
[10] N. Wahid and N. Hassan, “Self-tuning fuzzy PID controller design for aircraft pitch control,” in 2012 Third International Conference on Intelligent Systems Modelling and Simulation, 2012, pp. 19-24, doi: 10.1109/ISMS.2012.27.
[11] M. A. Usta, O. Akyazi, and A. S. Akpinar, “Aircraft roll control system using LQR and fuzzy logic controller,” in 2011 International Symposium on Innovations in Intelligent Systems and Applications, 2011, pp.223-227, doi: 10.1109/INISTA.2011.5946069.
[12] N. Wahid and M. F. Rahmat, “Pitch control system using LQR and fuzzy logic controller,” in 2010 IEEE Symposium on Industrial Electronics and Applications (ISIEA), 2010, pp.389-394, doi: 10.1109/ISIEA.2010.5679436
[13] N. Wahid, M. F. Rahmat, and K. Jusoff, “Comparative assessment using LQR and fuzzy logic controller for a pitch control system,” European Journal of Scientific Research, vol. 42, no. 2, pp. 184-194, 2010. [Online]. Available: https://www.researchgate.net/publication/267767915_Comparative_Assessment_using_LQR_and_Fuzzy_Logic_Controller_for_a _Pitch_Control_System
[14] L. Chrif and Z. M. Kadda, “Aircraft Control System Using LQG and LQR Controller with Optimal Estimation-Kalman Filter Design,” Procedia Engineering, vol. 80, pp. 245–257, 2014, doi: 10.1016/j.proeng.2014.09.084.
[15] A. Johari et al., “Improvement of Pitch Motion Control of an Aircraft Systems,” TELKOMNIKA (Telecommunication, Computing, Electronics and Control), vol. 16, no. 5, pp. 2263-2274, 2018, doi: 10.12928/telkomnika.v16i5.7434.
[16] W. Ahmed, Z. Li, H. Maqsood, and B. Anwar, “System Modeling and Controller Design for Lateral and Longitudinal Motion of F-16,” Automation, Control and Intelligent Systems, vol. 7, no. 1, pp. 39-45, 2019, doi: 10.11648/j.acis.20190701.15.
[17] M. A. Jami’ín, “The Cascade Linear Quadratic Gaussian (LQG) Controller for Automatic Landing Systems in Aircraft,” in 2020 International Conference on Applied Science and Technology (iCAST), 2020, pp. 12-16, doi: 10.1109/iCAST51016.2020.9557592.
[18] J. Shaji and R. B. Aswin, “Pitch Control of Flight System using Dynamic Inversion and PID Controller,” International Journal of Engineering Research & Technology (IJERT), vol. 4, no. 7, pp. 604-608, 2015. [Online]. Available: https://www.ijert.org/research/pitchcontrol-of-flight-system-using-dynamic-inversion-and-pid-controller-IJERTV4IS070502.pdf
[19] S. Jisha and R. B. Aswin, “Pitch Control of Aircraft Using LQR & LQG Control,” International Journal of Advanced Research in Electrical, Electronics and Instrumentation Engineering, vol. 4, no. 8, pp. 6981-6987, 2015, doi: 10.15662/ijareeie.2015.0408033
[20] T. Ishihara and L. A. Zheng, “LQG/LTR procedure using reduced-order Kalman filters,” International Journal of Control, vol. 92, no. 3, pp. 461-475, 2019, doi: 10.1080/00207179.2017.1359673.
[21] S. Das and K. Halder, “Missile attitudecontrol via a hybrid LQG-LTRLQI control scheme with optimum weight selection,” in 2014 First International Conference on Automation, Control, Energy and Systems (ACES),2014,pp.1-6,doi:10.1109/ACES.2014.6807996
[22] A. Maddi, A. Guessoum and, D. Berkani, “Using Linear Quadratic Gaussian Optimal Control for Lateral Motion of Aircraft,” International Journal of Aerospace and Mechanical Engineering, vol. 3, no. 1, pp. 19-23, 2009. [Online]. Available: https://publications.waset.org/12566/using-linear-quadratic-gaussian-optimal-control-for-lateral-motion-of-aircraft
[23] R. Kumar M. G. and R. Murthy T. V., “Fault Detection of Aircraft Plant Using KALMAN FILTER, “IJCTA, vol. 8, no. 3, pp. 923-932, 2015. [Online]. Available: https://www.researchgate.net/publication/292615643_Fault_Detection_of_Aircraft_Plant_Using_KALMAN_FILTER
[24] R. B -Cardenas and M. Molinas, “Optimal LQG controller for variable speed wind turbine based on genetic algorithm,” Energy Procedia, vol. 20, pp. 207-216, 2012, doi: 10.1016/j.egypro.2012.03.021.
[25] F. Huerta, D. Pizarro, S. Cobreces, F. J. Rodriguez, C. Giron, and A. Rodriguez, “LQG servo controller for the current control of LCL grid connected voltage-source converters,” IEEE Transactions on Industrial Electronics, vol. 59, no. 11, pp. 4272-4284, 2012, doi: 10.1109/TIE.2011.2179273.
[26] A. Ingabire and A. A. Sklyarov, “Control of longitudinal flight dynamics of a fixedwing UAV using LQR, LQG and nonlinear control,” in International Conference “Energy Efficiency and Energy Saving in Technical Systems (EEESTS-2019),” 2019, vol. 104, doi: 10.1051/e3sconf/201910402001
[27] I. K. Mohammed and A. I. Abdulla, “Design of optimised linear quadratic regulator for capsule endoscopes based on artificial bee colony tuning algorithm,” International Journal for Engineering Modelling, vol. 31, no. 1-2, pp. 77-98, 2018, doi: 10.31534/engmod.2018.12.ri.02_vjan.
[28] I. Siradjuddin, B. Setiawan, A. Fahmi, Z. Amalia, and E. Rohadi, “State space control using LQR method for a cart-inverted pendulum linearised model,” International Journal of Mechanical & Mechatronics Engineering, vol. 17, no. 01, pp. 119-126, 2017. [Online]. Available: https://www.researchgate.net/publication/316253948_State_space_control_using_LQR_method_for_a_cartinverted_pendulum_linearised_model
[29] A. I. Abdulla, “Linear Quadratic Regulator Using Artificial Immunize System,” Al-Rafidain Engineering Journal (AREJ), vol. 20, no. 3, pp. 80-91, 2012. [Online]. Available: https://rengj.mosuljournals.com/article_50481.html
[30] A. I. Abdulla, J. M. Ahmed and S. M. Attya, “Genetic Algorithm Based Optimal Feedback Control Weighting Matrices Computation,” Al-Rafidain Engineering Journal (AREJ), vol. 21, no. 5, pp. 25-33, 2013, doi: 10.33899/rengj.2013.79574
Abdulla I. Abdulla is an Asst. Prof. in Control Eng. and has BSc. in Electronic Eng. from Al Rasheed Engineering and Science College with honor degree in 1985, and MSc. in Control Engineering from Baghdad University in 1995 with excellent grad. Then, he started his academic journey working as a lecturer at Ninevah University. His current research interests include advanced control strategies and optimization techniques. He can be connected at email: abdullah.abdullah@uoninevah.edu.iq
Ibrahim K. Mohammed is an Asst. Prof. in Control Eng. He received a BSc. in Electrical Eng. from College of Eng./ Mosul University in 1992, MSc. in Electronic Eng. from Al Rasheed Eng. and Science College in 1999, and Ph.D in Control Eng. from school of Electrical and Electronic Engineering/ Newcastle University/ England in 2012. Then, he started his academic journey working as a lecturer at Ninevah University. He is currently head of Systems and Control Eng. Department/College of Electronics Eng./ Ninevah University. His current research interests include adaptive control and optimal control strategies and optimization techniques. He can be connected at email: ibrahim.mohammed@uoninevah.edu.iq.

Aircraft pitch control design using LQG controller based on genetic algorithm (Abdulla I Abdulla)
