
Real-Time Processing and High-Quality Imaging of Navigation Strip Data Using SSS Based on AUVs
 , ,
, ,
Abstract
:1. Introduction
- We construct and analyze a real-time processing flow, addressing the limitations of existing post-processing strategies when applied in real-time contexts.
- A comprehensive real-time data quality management strategy is introduced, providing methods for optimizing key data and performing efficient filtering.
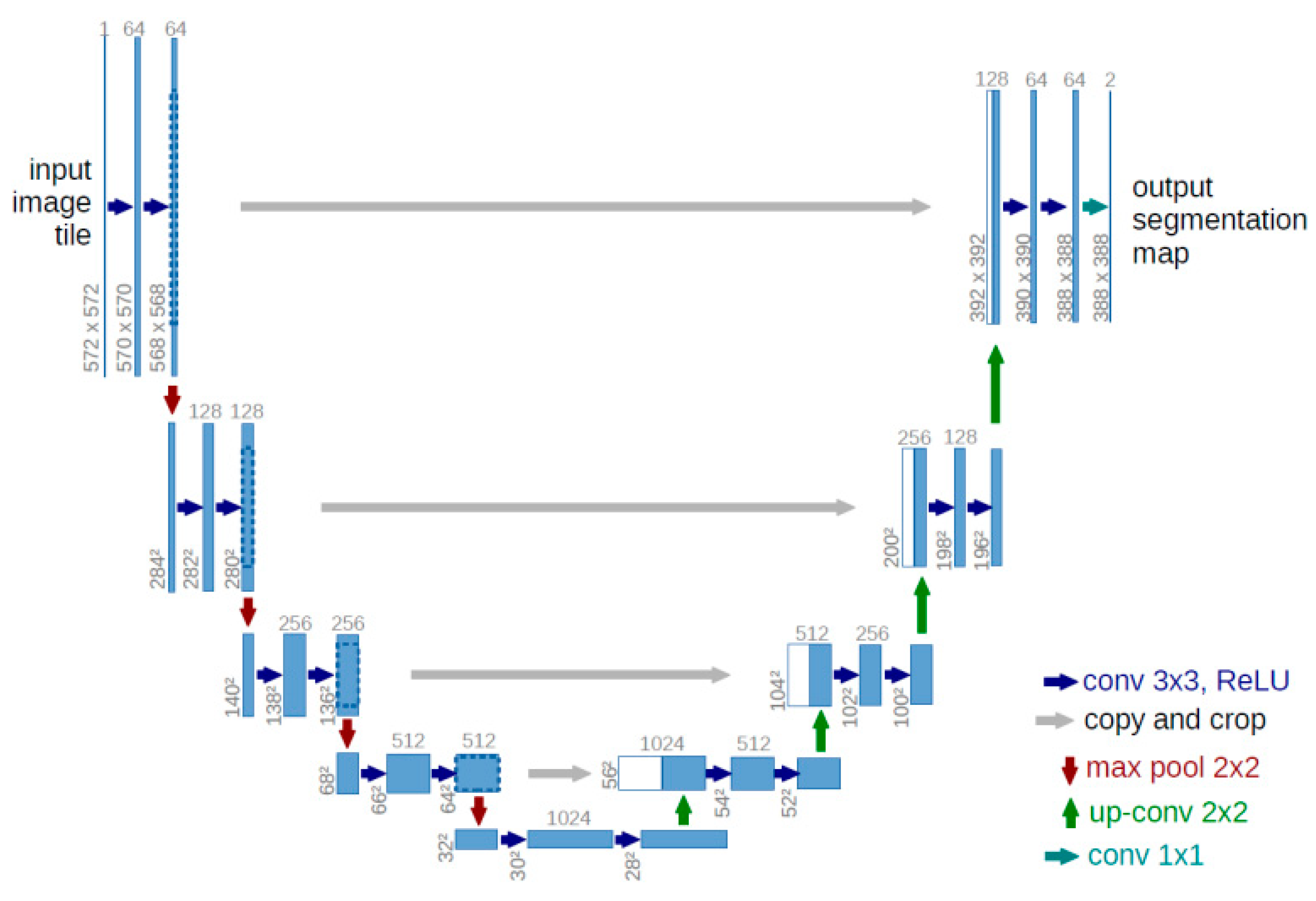
- Utilizing a strategy based on the Unet network, we achieve heightened efficiency and accuracy in automatic seafloor line tracking.
- Innovatively, we propose the use of statistical characteristics from historical echo data for real-time correction of radial distortion.
- We introduce a technique based on the Alternating Direction Multiplier Method, offering a novel approach to real-time noise reduction for strip images.
- Through on-site experiments in Bohai Bay, the robustness and practicality of our proposed methods are thoroughly validated.
2. Key Technologies for Real-Time Processing and High-Quality Imaging of the Navigational Strip
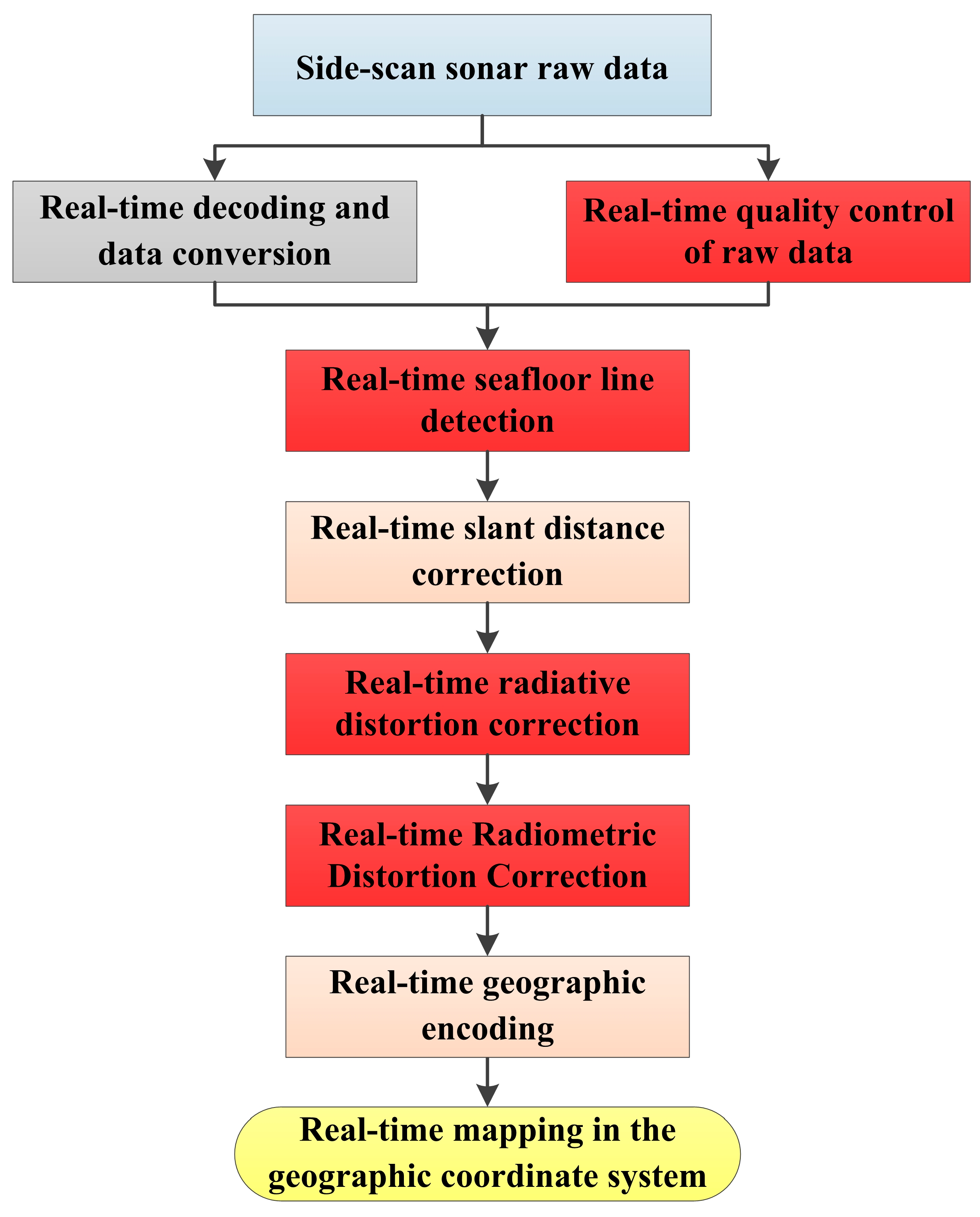
2.1. SSS Data Real-Time Processing Workflow and Existing Problems
- (1)
- Real-Time Quality Control of Raw Observation Data
- (2)
- Seabed Line Tracking
- (3)
- Radiant Distortion Correction
- (4)
- Real-Time Denoising of Navigational Strip Images
2.2. Key Technology Research
2.2.1. Real-Time Quality Control of Raw Data
Echo Intensity Data Filtering
INS, DVL, Depth/Height Data Filtering
- Quality control of data provided by INS
- 2.
- Quality control of DVL system data
- 3.
- Quality control of depth gauge/altimeter data
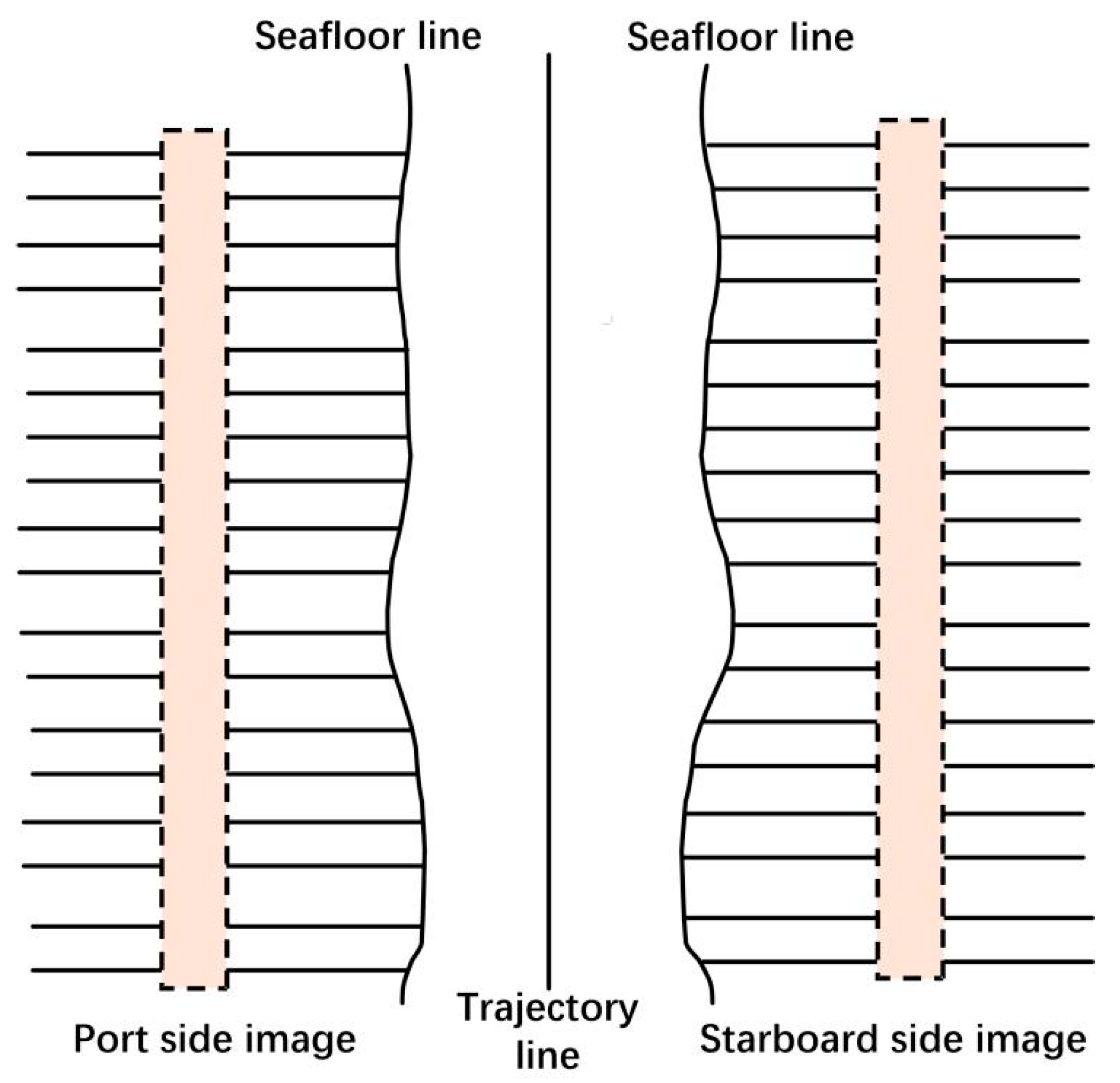
2.2.2. Real-Time Automatic Tracking of Seafloor Lines
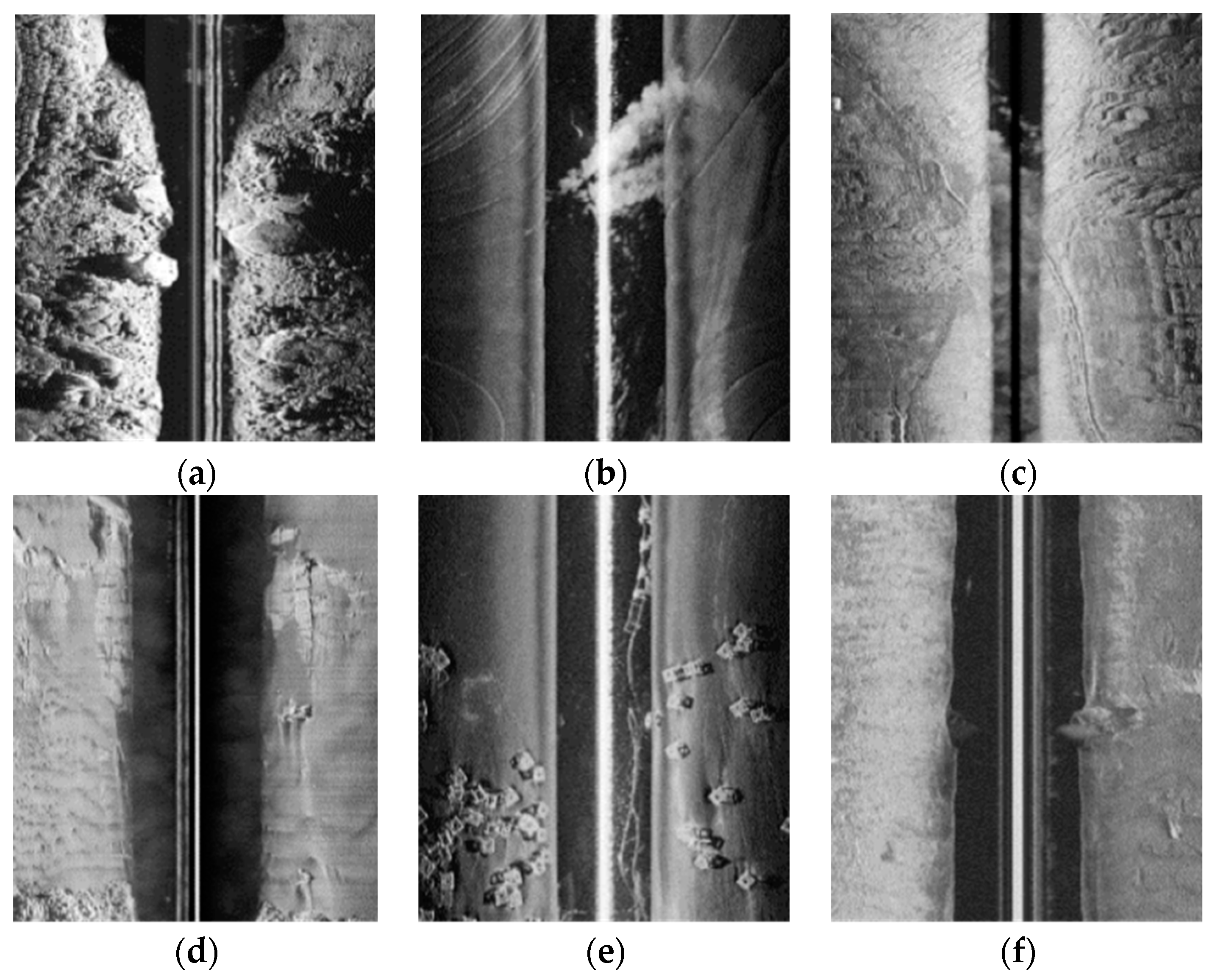
Analysis of Image Characteristics and Factors Affecting Seafloor Tracking
- AUV wake
- 2.
- Surface echo
- 3.
- Suspended matter and water quality in water
- 4.
- Strong absorption and contrast bottom texture
- 5.
- Interference pulse
- 6.
- Real-time gain
Building the Seafloor Line Semantic Segmentation Model
- Semantic segmentation model taking into consideration the symmetry of the seafloor line
- 2.
- Building the loss function in consideration of the symmetry of the seafloor line
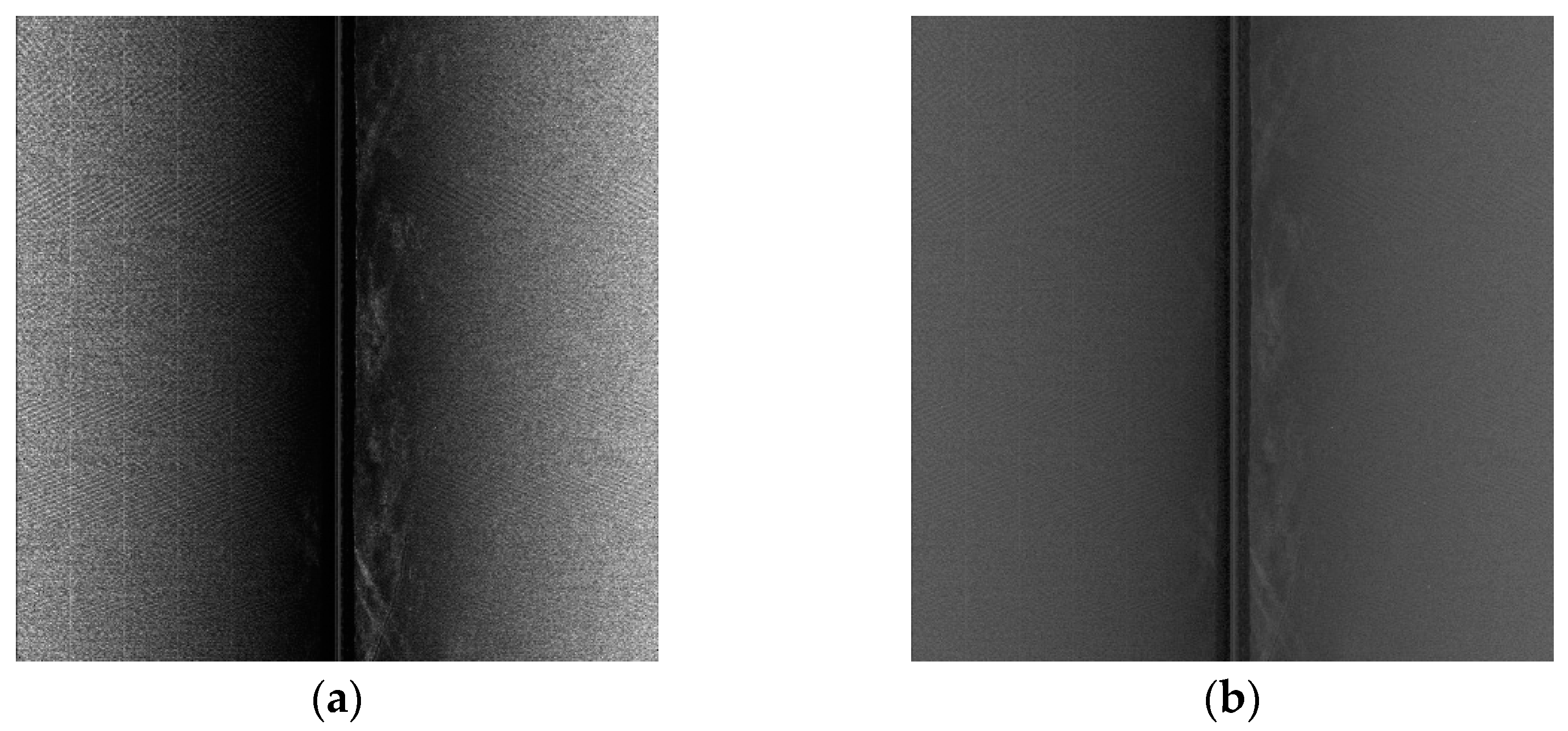
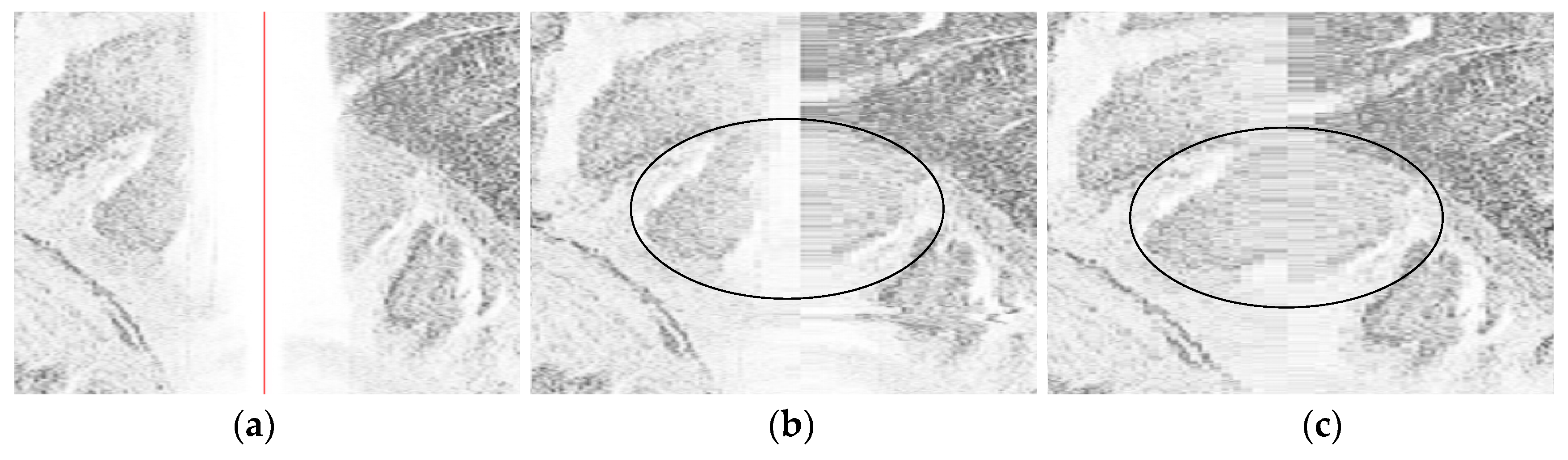
2.2.3. Real-Time Radiometric Distortion Correction
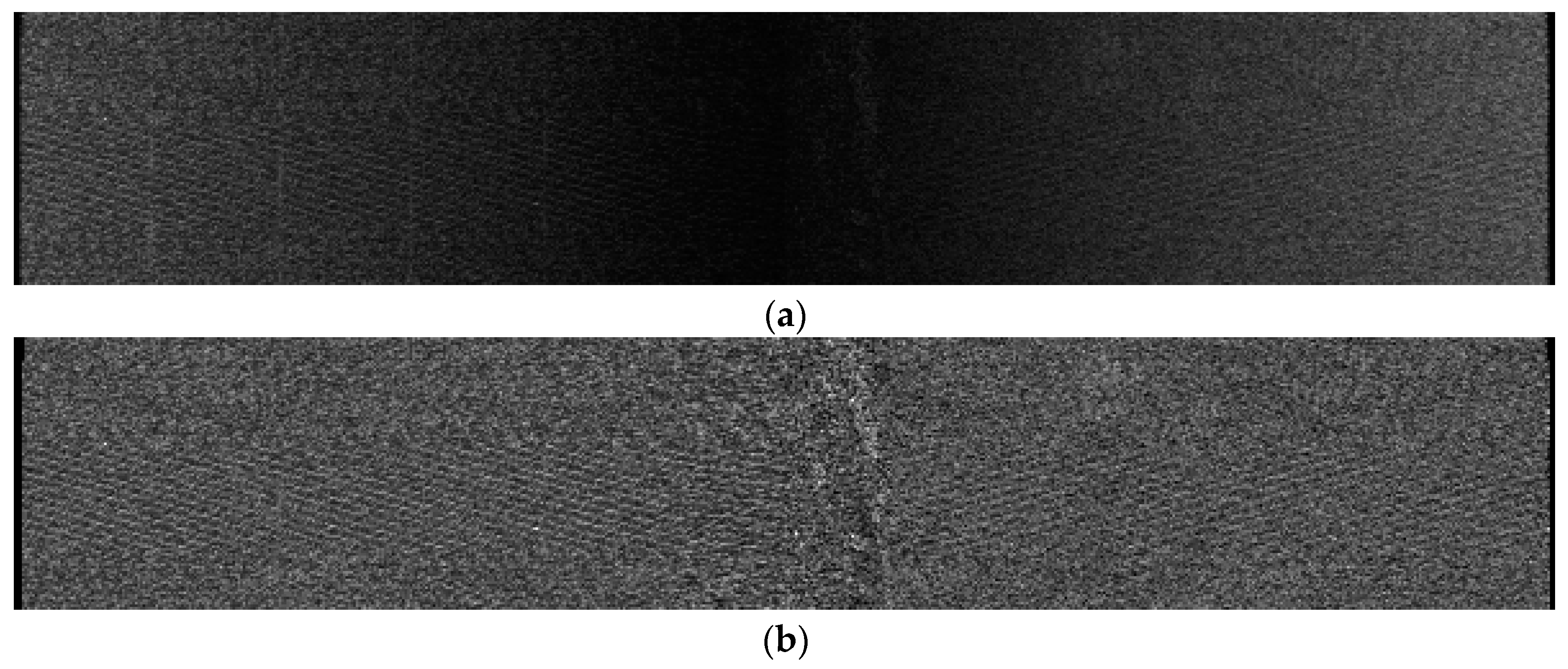
2.2.4. Real-Time Noise Reduction
3. Experiments and Analysis
3.1. Data Preparation
3.2. Analysis and Evaluation of Key Technologies in Strip Data Processing
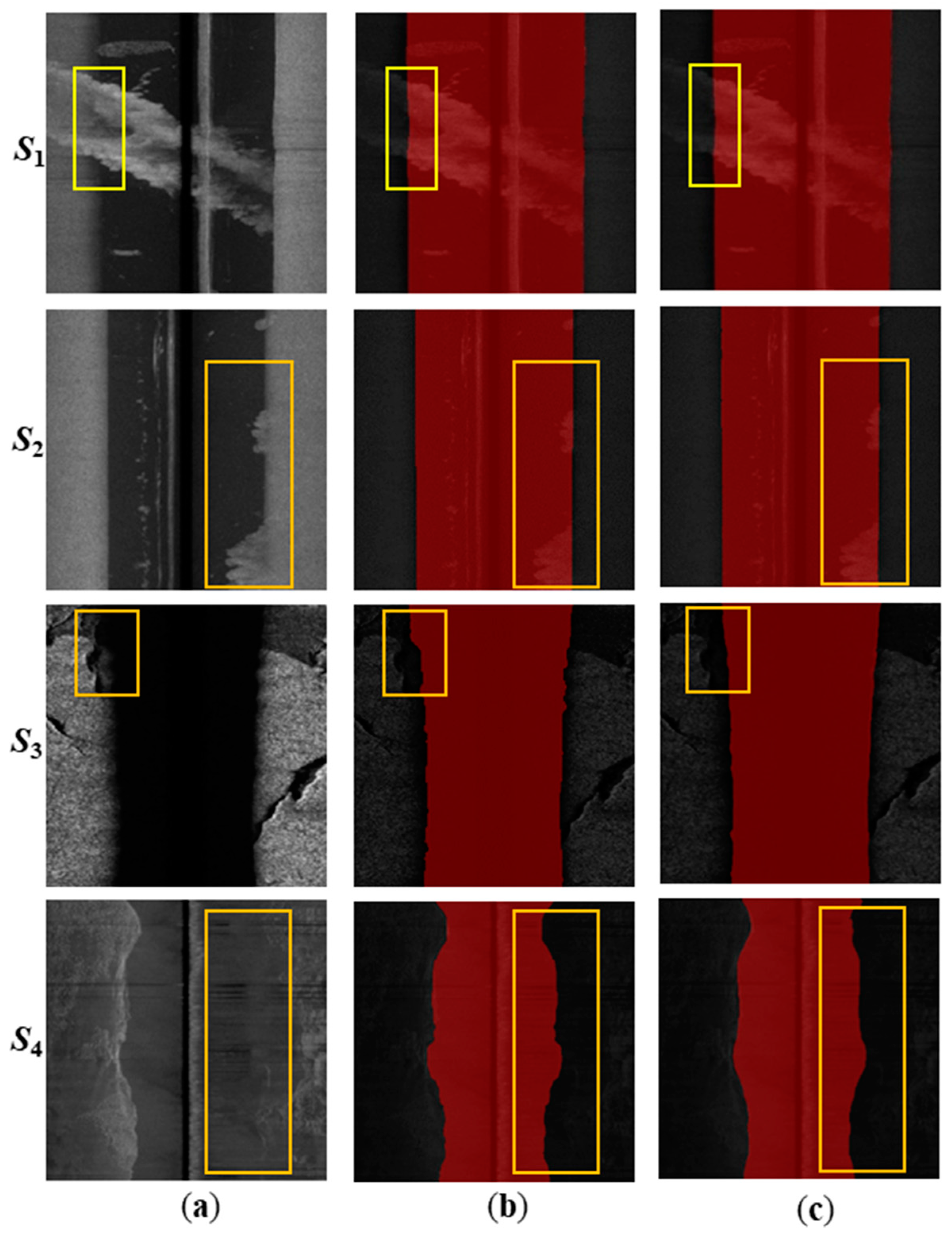
3.2.1. Automatic Seabed Line Tracking
3.2.2. Radiometric Distortion Correction
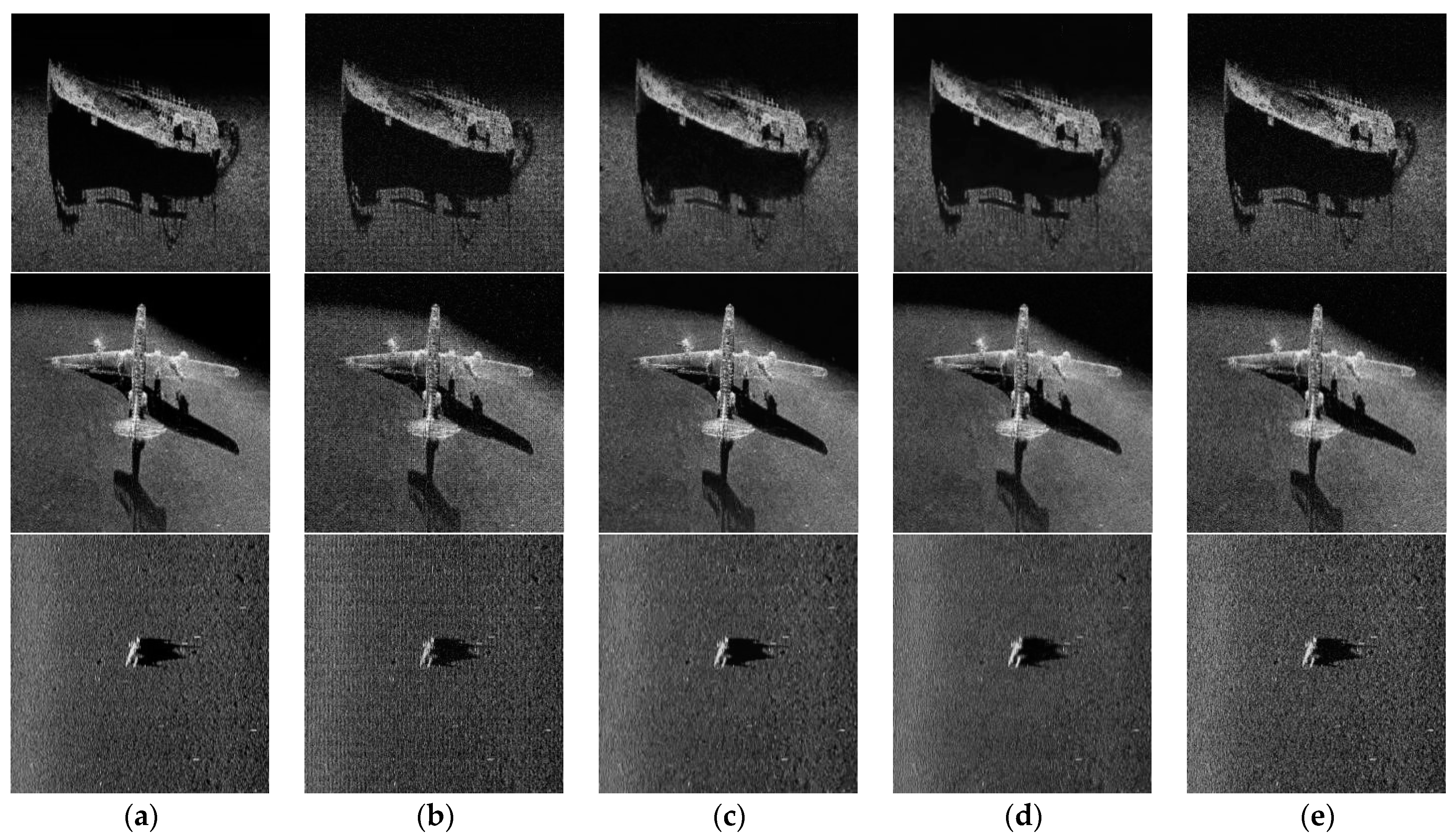
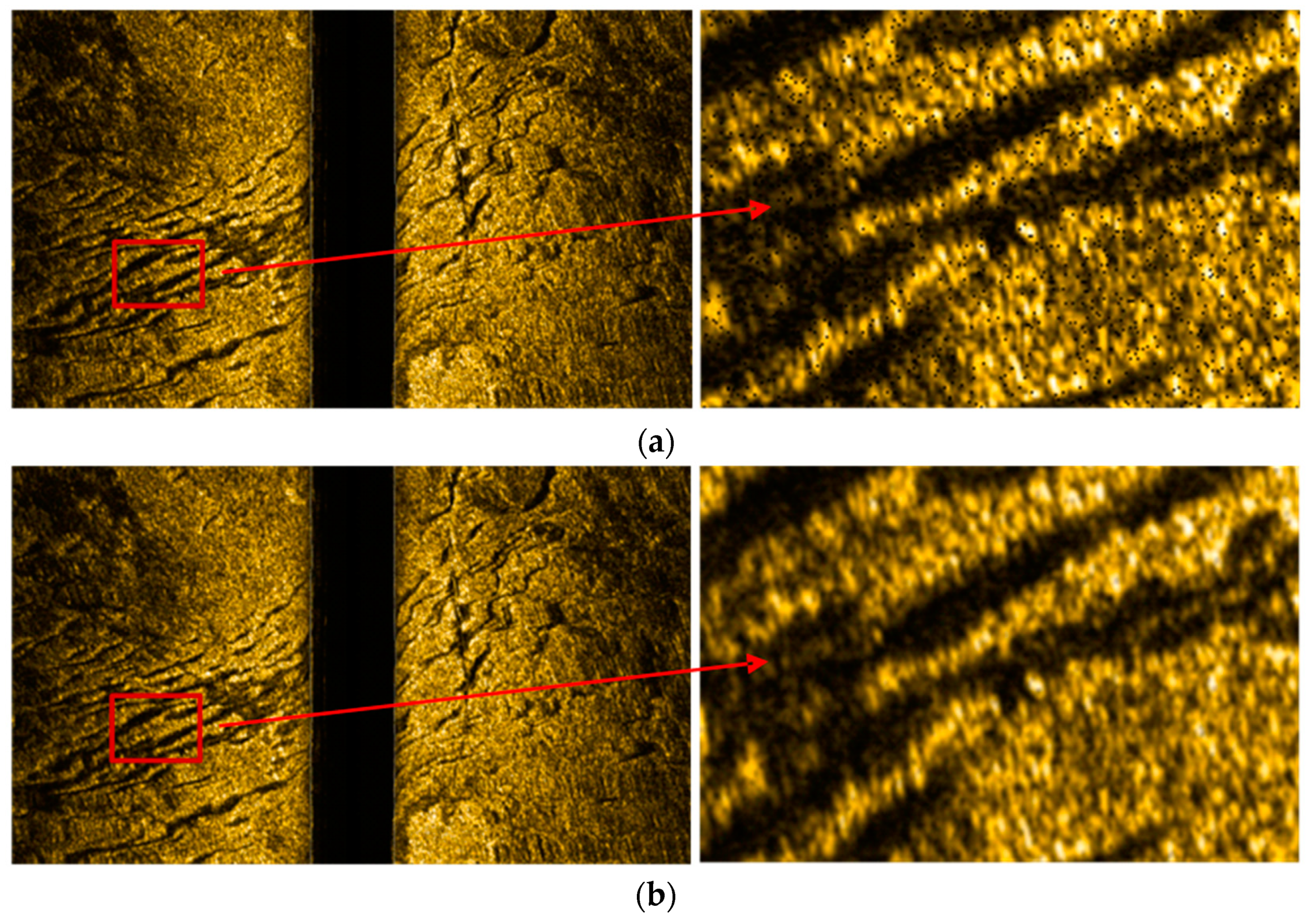
3.2.3. Real-Time Noise Reduction
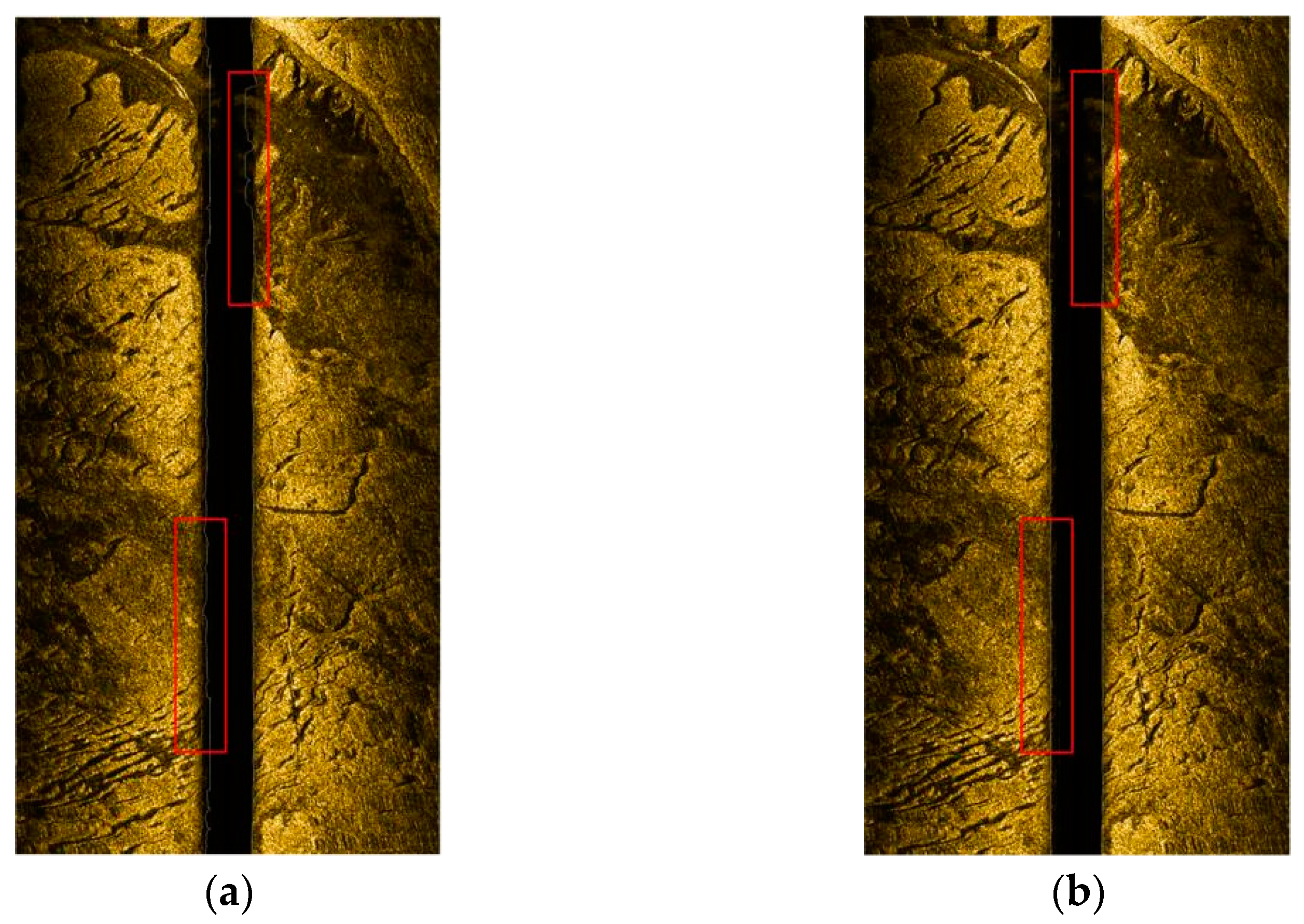
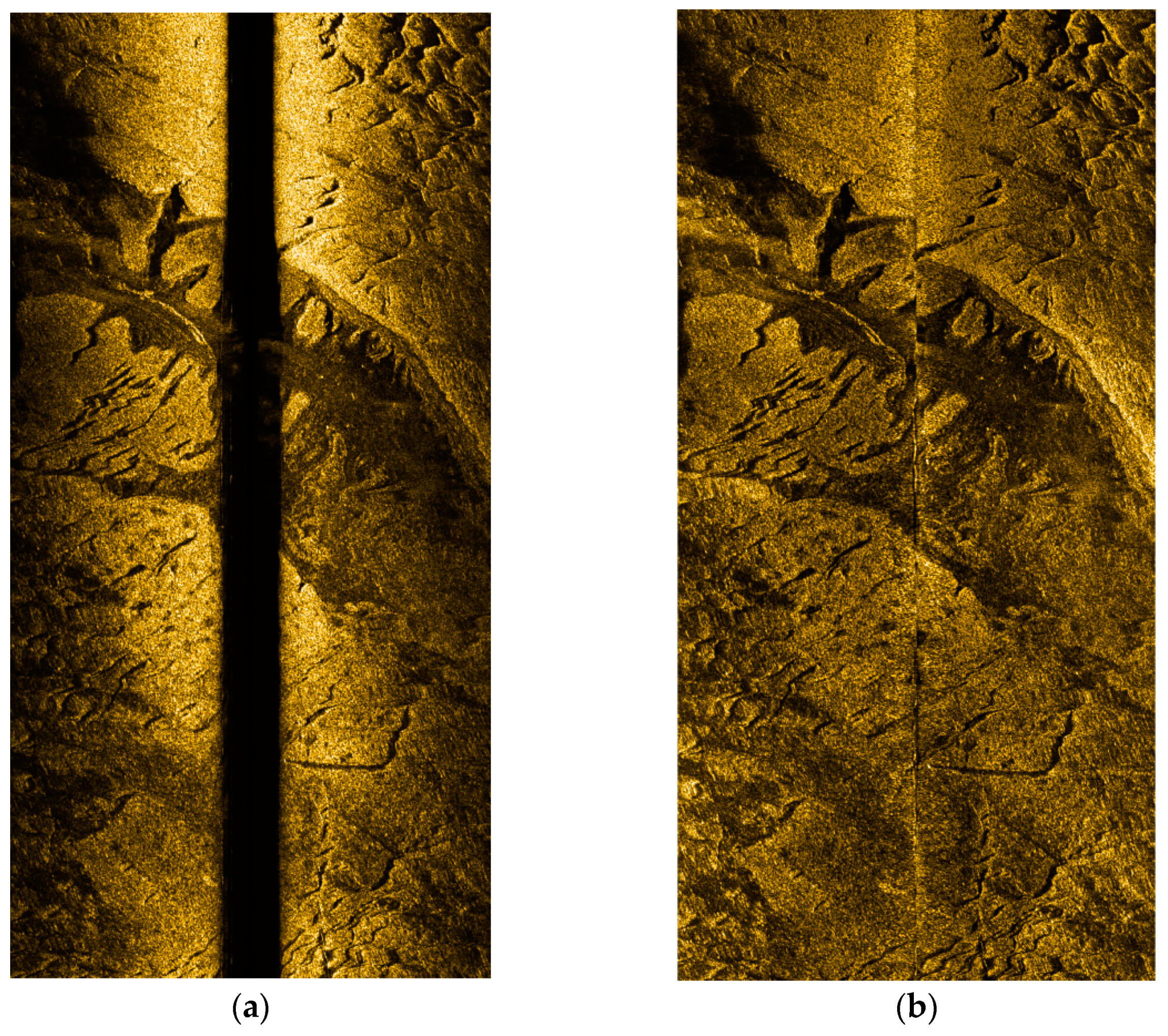
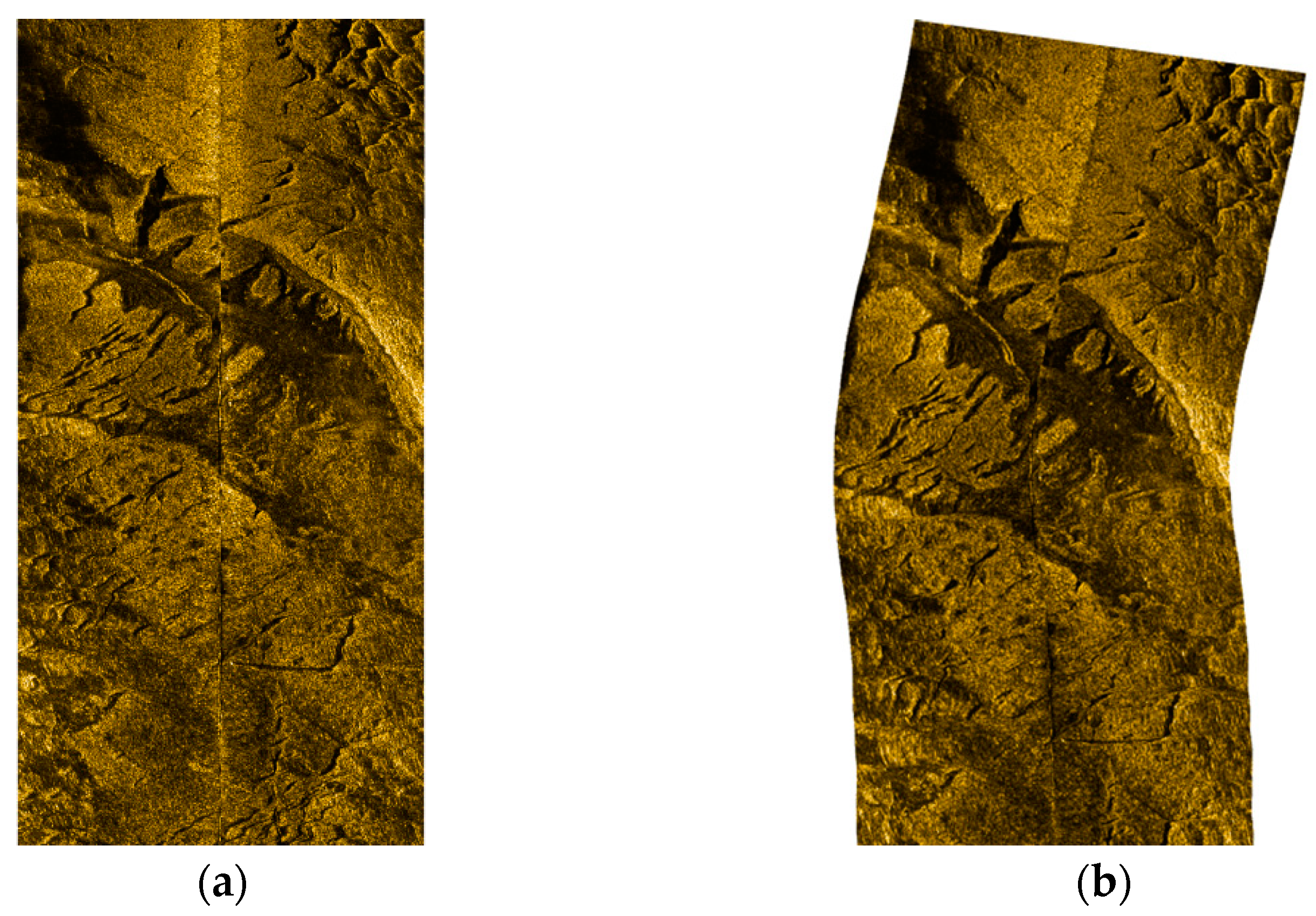
3.2.4. Geographic Coding and Swath Image Stitching
4. Conclusions and Recommendation
- Overview of post-processing procedures and methods for side-scan sonar data: A detailed analysis was conducted on the main issues faced by current methods when performing real-time processing.
- Real-time quality control of original observational data: A new control procedure was proposed, including the fusion of INS and DVL navigation data using Kalman filtering, bi-directional filtering methods for echo intensity, and a data filtering method using sliding average or comparison with seabed line tracking for altimeter and pressure gauge data.
- Automatic seabed line tracking: Based on the characteristics of waterfall images, a method based on the Unet network was designed. For real-time processing of single-swath data in the Bohai Bay, this method took only 0.4 s, achieving a high level of accuracy that was consistent with the post-processing results.
- Real-time correction of radiometric distortion: A method was introduced for automatically determining the baseline based on historical echo data. For real-time single-swath data in the Bohai Bay, this method was able to achieve angle-related radiometric distortion correction within 1 s.
- Real-time noise elimination: A method based on the Alternating Direction Multiplier Method (ADMM) was introduced for real-time noise elimination. For real-time processing of single-swath data in the Bohai Bay, this method took only 0.6 s, significantly improving the signal-to-noise ratio of swath images compared to traditional methods.
- Further Optimization of Real-time Processing: Although we achieved real-time data processing, there is still room for improvement in processing efficiency and immediacy. Our method might face challenges especially in scenarios with large data volumes and complex conditions. Future work should further optimize our algorithm for such scenarios.
- Generalizability and Robustness of the Algorithm: While our real-time processing method performs excellently under certain specific scenarios, its general applicability and robustness remain to be addressed. Future research should focus on ensuring consistent and efficient performance across various scenes and environmental conditions.
- Integration with Other Advanced Technologies: Considering the advancements in modern deep learning and AI technologies, integrating our method with these cutting-edge technologies should be explored to further improve the accuracy and efficiency of data processing.
- Holistic System-Level Considerations: In real-time processing, beyond the algorithm itself, there is a need to consider the synergistic operation of the entire system, including sensor selection, data transmission, and storage, all of which can influence the effectiveness of real-time processing.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Arshad, M.R. Recent advancement in sensor technology for underwater applications. Indian J. Mar. Sci. 2009, 38, 267–273. [Google Scholar]
- Anderson, J.T.; Van Holliday, D.; Kloser, R.; Reid, D.G.; Simard, Y. Acoustic seabed classification: Current practice and future directions. ICES J. Mar. Sci. 2008, 65, 1004–1011. [Google Scholar] [CrossRef]
- Coiras, E.; Petillot, Y.; Lane, D.M. An expectation-maximization framework for the estimation of bathymetry from side-scan sonar images. In Proceedings of the IEEE Europe OCEANS Conference, Brest, France, 20–23 June 2005; pp. 261–264. [Google Scholar]
- Johnson, S.G.; Deaett, M.A. The application of automated recognition techniques to side-scan sonar imagery. IEEE J. Ocean. Eng. 1994, 19, 138–144. [Google Scholar] [CrossRef]
- Petillot, Y.R.; Reed, S.R.; Bell, J.M. Real time AUV pipeline detection and tracking using side scan sonar and multi-beam echo-sounder. In Proceedings of the OCEANS ‘02 MTS/IEEE, Biloxi, MI, USA, 29–31 October 2002; Volume 1, pp. 217–222. [Google Scholar]
- Sahoo, A.; Dwivedy, S.K.; Robi, P. Advancements in the field of autonomous underwater vehicle. Ocean. Eng. 2019, 181, 145–160. [Google Scholar] [CrossRef]
- Yu, S.C. Development of real-time acoustic image recognition system using by autonomous marine vehicle. Ocean. Eng. 2008, 35, 90–105. [Google Scholar] [CrossRef]
- Wu, Y.; Zhao, Y.; Lang, S. Development of Autonomous Underwater Vehicles Technology. Strateg. Study CAE 2020, 22, 26–31. [Google Scholar] [CrossRef]
- Tang, Y.; Wang, L.; Jin, S.; Zhao, J.; Huang, C.; Yu, Y. AUV-Based Side-Scan Sonar Real-Time Method for Underwater-Target Detection. J. Mar. Sci. Eng. 2023, 11, 690. [Google Scholar] [CrossRef]
- Coiras, E.; Petillot, Y.; Lane, D.M. Multiresolution 3-D Reconstruction From Side-Scan Sonar Images. IEEE Trans. Image Process. 2007, 16, 382–390. [Google Scholar] [CrossRef]
- Blondel, P. The Handbook of Sidescan Sonar; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2009; pp. 249–276. [Google Scholar] [CrossRef]
- Bochkovskiy, A.; Wang, C.Y.; Liao, H.Y. YOLOv4: Optimal Speed and Accuracy of Object Detection. arXiv 2020, arXiv:2004.10934. [Google Scholar]
- Peng, C.; Fan, S.; Cheng, X.; Cao, Y.; Zeng, G. An Improved Side Scan Sonar Image Processing Framework for Autonomous Underwater Vehicle Navigation. In Proceedings of the 15th International Conference on Underwater Networks & Systems, Guangdong, China, 22–24 November 2021; p. 1. [Google Scholar]
- Yan, J.; Meng, J.; Zhao, J. Bottom Detection from Backscatter Data of Conventional Side Scan Sonars through 1D-UNet. Remote Sens. 2021, 13, 1024. [Google Scholar] [CrossRef]
- Zheng, G.; Zhang, H.; Li, Y.; Zhao, J. A Universal Automatic Bottom Tracking Method of Side Scan Sonar Data Based on Semantic Segmentation. Remote. Sens. 2021, 13, 1945. [Google Scholar] [CrossRef]
- Yu, H.; Li, Z.; Li, D.; Shen, T. Bottom Detection Method of Side-Scan Sonar Image for AUV Missions. Complexity 2020, 2020, 1. [Google Scholar] [CrossRef]
- Zhao, J.; Yan, J.; Zhang, H.; Meng, J. A New Radiometric Correction Method for Side-Scan Sonar Images in Consideration of Seabed Sediment Variation. Remote. Sens. 2017, 9, 575. [Google Scholar] [CrossRef]
- Zhao, J.H.; Wang, X.; Zhang, H.M.; Wang, A.X. A Comprehensive Bottom-Tracking Method for Sidescan Sonar Image Influenced by Complicated Measuring Environment. IEEE J. Ocean. Eng. 2017, 42, 619–631. [Google Scholar] [CrossRef]
- Wang, X.; Wu, Q.H.; Wang, A.X. A Comprehensive Radiometric Distortion Correction Method for Side-scan Sonar. J. Geod. Geodyn. 2018, 38, 1174–1179. [Google Scholar]
- Wang, A.X.; Church, I.; Gou, J.; Zhao, J.H. Sea bottom line tracking in side-scan sonar image through the combination of points density clustering and chains seeking. J. Mar. Sci. Technol. 2020, 25, 849–865. [Google Scholar] [CrossRef]
- Wang, A.X. 3D Seabed Terrain Recovery Based on Side-Scan Sonar Images; Wuhan University: Wuhan, China, 2014. [Google Scholar]
- Buscombe, D. Shallow water benthic imaging and substrate characterization using recreational-grade sidescan-sonar. Environ. Model. Softw. 2017, 89, 1–18. [Google Scholar] [CrossRef]
- Shih, C.C.; Horng, M.F.; Tseng, Y.R.; Su, C.F.; Chen, C.Y. An Adaptive Bottom Tracking Algorithm for Side-Scan Sonar Seabed Mapping. In Proceedings of the 2019 IEEE Underwater Technology (Ut), Taiwan, China, 16–19 April 2019. [Google Scholar]
- Zerr, B.; Mailfert, G.; Bertholom, A.; Ayreault, H. Sidescan Sonar Image Processing for AUV Navigation. Eur. Ocean. 2005, 1, 124–130. [Google Scholar]
- Langer, D.; Hebert, M. Building qualitative elevation maps from side scan sonar data for autonomous underwater navigation. In Proceedings of the IEEE International Conference on Robotics and Automation, Sacramento, CA, USA, 9–11 April 1991; Volume 3, pp. 2478–2483. [Google Scholar]
- Chen, G.Y.; Bui, T.D. Image denoising with neighbour dependency and customized wavelet and threshold. Pattern Recognit 2005, 38, 115–124. [Google Scholar] [CrossRef]
- Acosta, G.G.; Villar, S.A. Accumulated CA-CFAR process in 2-D for online object detection from sidescan sonar data. IEEE J. Ocean. Eng. 2015, 40, 558–569. [Google Scholar] [CrossRef]
- Ding, G.; Song, Y.; Guo, J.; Feng, C.; Li, G.; Yan, T.; He, B. Side-scan sonar image segmentation using kernel based extreme learning machine. In Proceedings of the 2017 IEEE Underwater Technology (UT), Busan, Republic of Korea, 21–24 February 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Long, Z.Y. A sea surface detection and eliminating method of side-scan sonar image. Hydrogr. Surv. Charting 2022, 42, 13–17. [Google Scholar]
- Huang, X.D. A new image fusion method based on Laplacian pyramid in wavelet field. Electron. Sci. Technol. 2014, 27, 170–173. [Google Scholar]
- Ye, X.; Li, P.; Deng, Y. A side scan sonar image denoising algorithm based on compound of fuzzy weighted average and Kalman filter. In Proceedings of the 2012 IEEE International Conference on Mechatronics and Automation, Chengdu, China, 5–8 August 2012; pp. 720–724. [Google Scholar]
- Tin, H.W.; Leu, S.W.; Wang, F.T.; Wen, C.C.; Chang, S.H. Denoising Algorithm Based on Fractal-Wavelet coding and its Application to Side-scan Sonar Image. In Proceedings of the 2013 International Symposium on Physics and Mechanics of New Materials and Underwater Applications (PHENMA 2013), Kaohsiung, Taiwan, 5–8 June 2013; p. 30. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Experimental Image | Methods | PSNR |
|---|---|---|
| Aircraft wreckage | ADMM | 25.4163 |
| flexISP | 23.4488 | |
| DeepJoint | 21.3642 | |
| Shipwreck | ADMM | 26.7860 |
| flexISP | 24.2550 | |
| DeepJoint | 22.1005 | |
| Frogman | ADMM | 21.3677 |
| flexISP | 21.3410 | |
| DeepJoint | 19.3762 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, Y.; Wang, J.; Jin, S.; Zhao, J.; Wang, L.; Bian, G.; Zhao, X. Real-Time Processing and High-Quality Imaging of Navigation Strip Data Using SSS Based on AUVs. J. Mar. Sci. Eng. 2023, 11, 1769. https://doi.org/10.3390/jmse11091769
Tang Y, Wang J, Jin S, Zhao J, Wang L, Bian G, Zhao X. Real-Time Processing and High-Quality Imaging of Navigation Strip Data Using SSS Based on AUVs. Journal of Marine Science and Engineering. 2023; 11(9):1769. https://doi.org/10.3390/jmse11091769
Chicago/Turabian StyleTang, Yulin, Junsen Wang, Shaohua Jin, Jianhu Zhao, Liming Wang, Gang Bian, and Xinyang Zhao. 2023. "Real-Time Processing and High-Quality Imaging of Navigation Strip Data Using SSS Based on AUVs" Journal of Marine Science and Engineering 11, no. 9: 1769. https://doi.org/10.3390/jmse11091769