
Microwave Imaging for Half-Space Conductors Using the Whale Optimization Algorithm and the Spotted Hyena Optimizer


Abstract
:1. Introduction
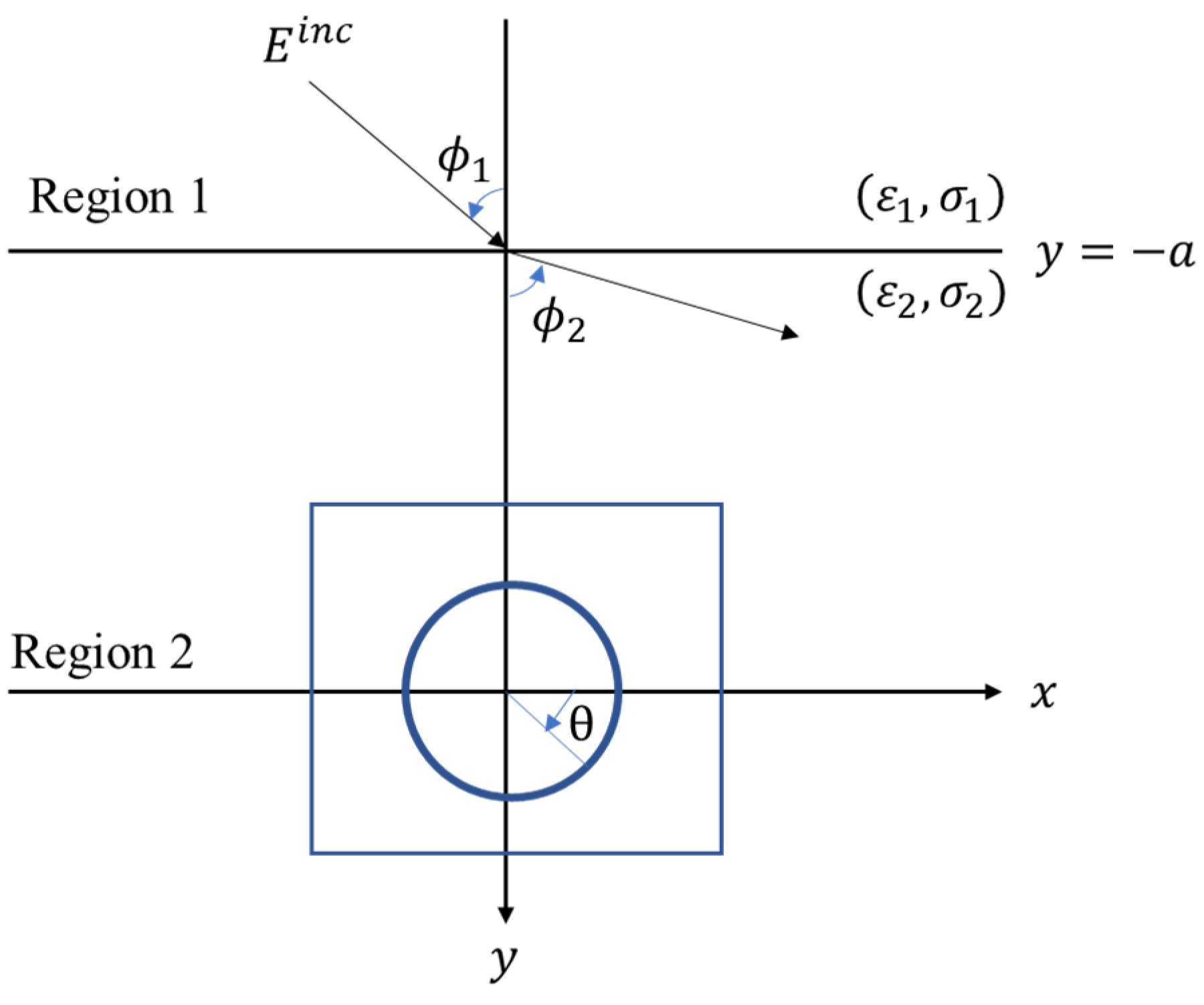
2. Theoretical Formulation
3. Optimization Algorithms
3.1. Whale Optimization Algorithm
3.1.1. Encircling the Prey
3.1.2. Exploitation Phase
- Shrinking encircling mechanismThe position update equation of the shrinking encircling mechanism is shown in Equation (17). By decreasing from 2 to 0 and substituting its value into Equation (18), And when the pace coefficient is in the range of [−1, 1], the search process of the whale algorithm enters the development stage. The current best position is the prey location or the nearest position to the prey. The whale then approaches to the best position in order to find the best solution.
- Spiral updating position
3.1.3. Exploration Phase
3.2. Spotted Hyena Optimizer
3.2.1. Encircling the Prey
3.2.2. Hunting
3.2.3. Attacking Prey (Exploitation)
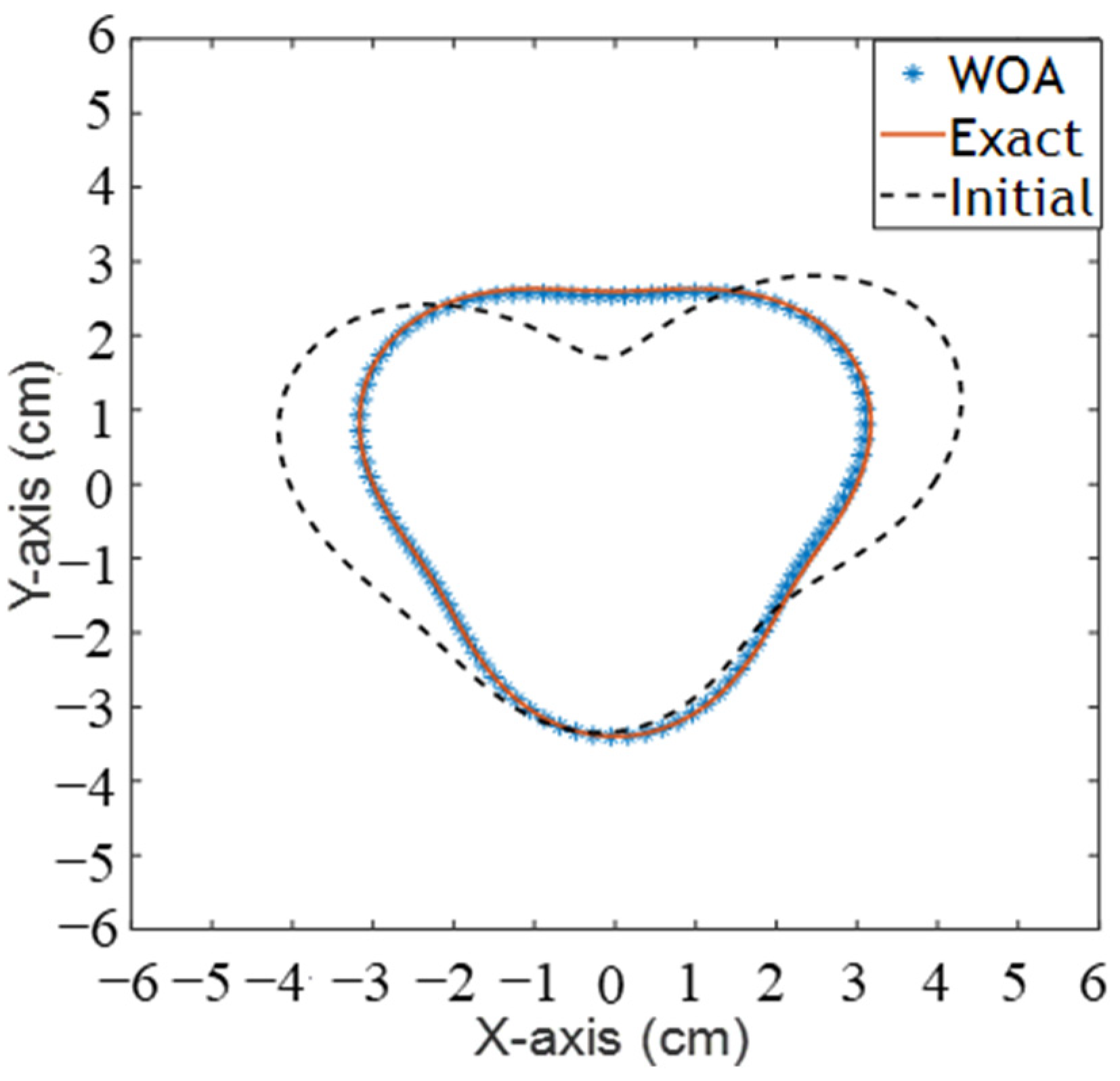
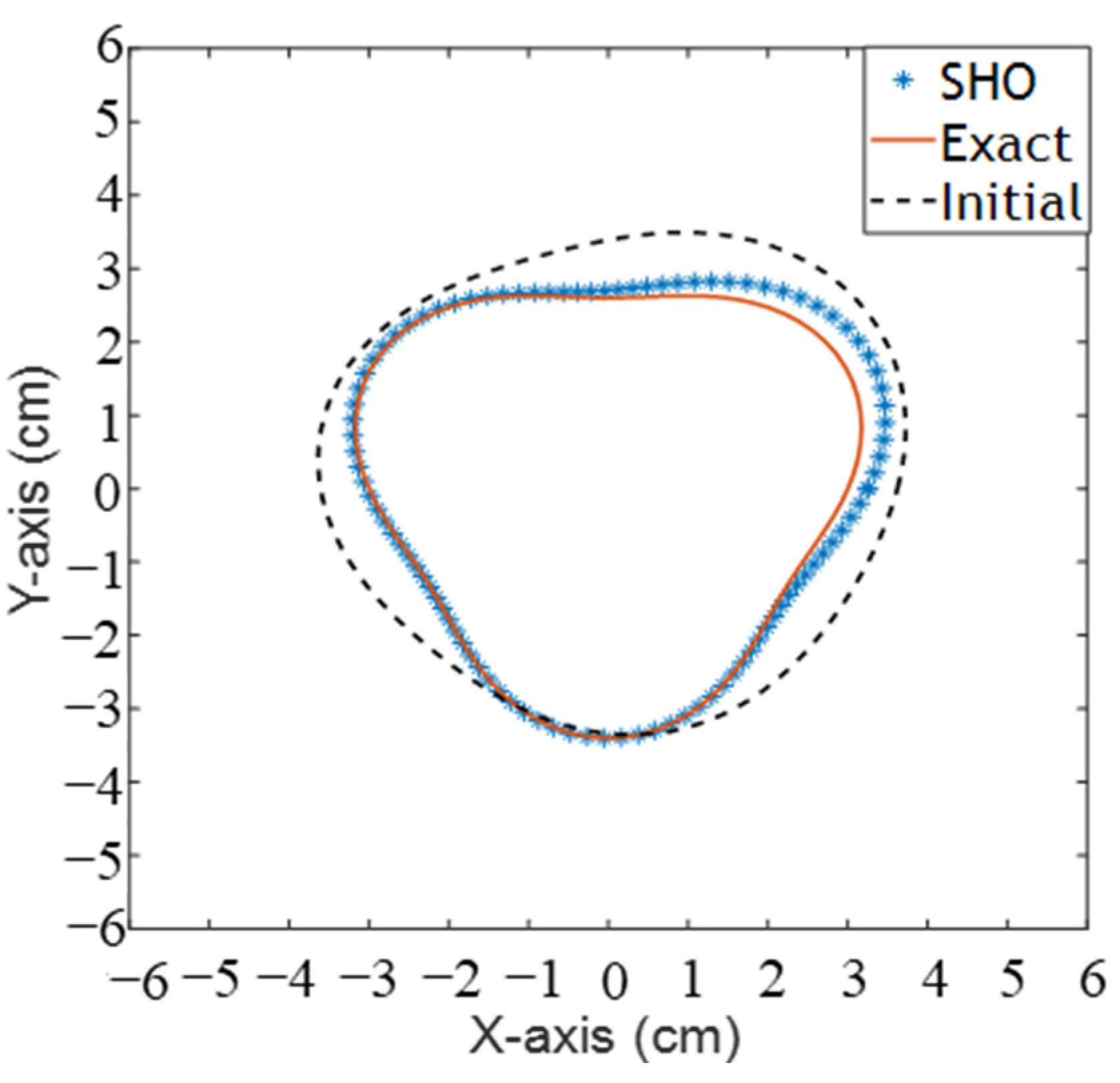
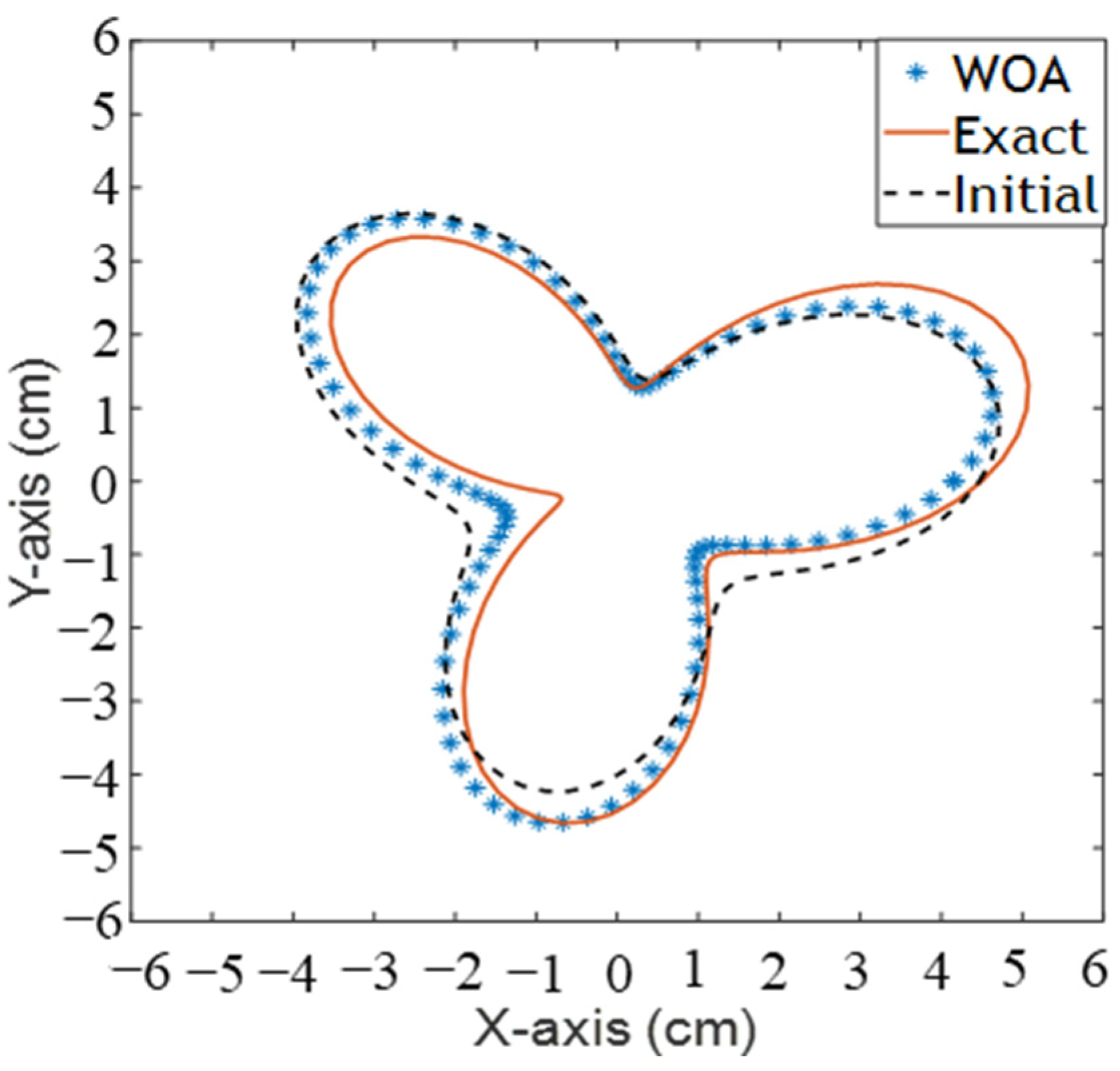
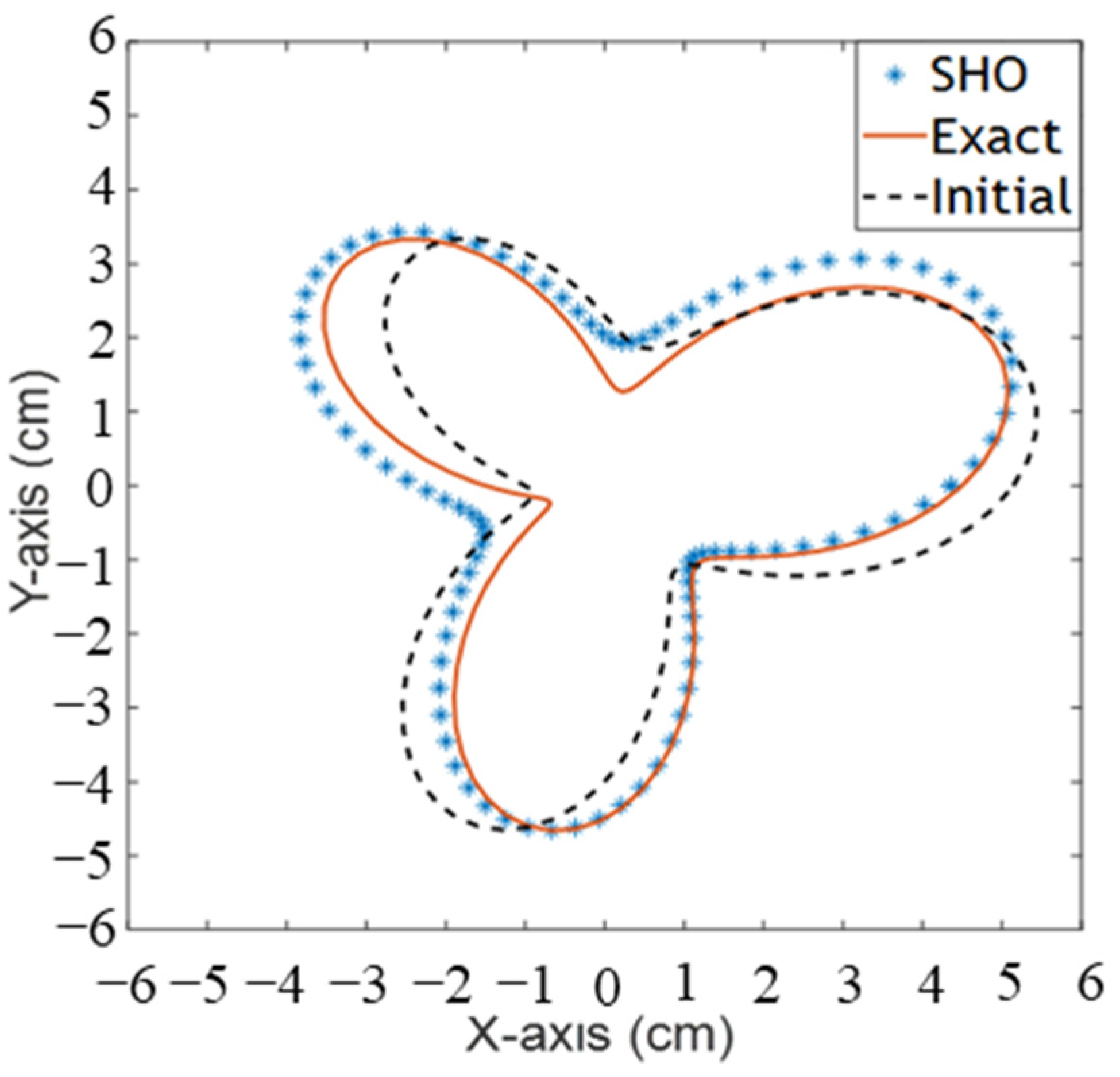
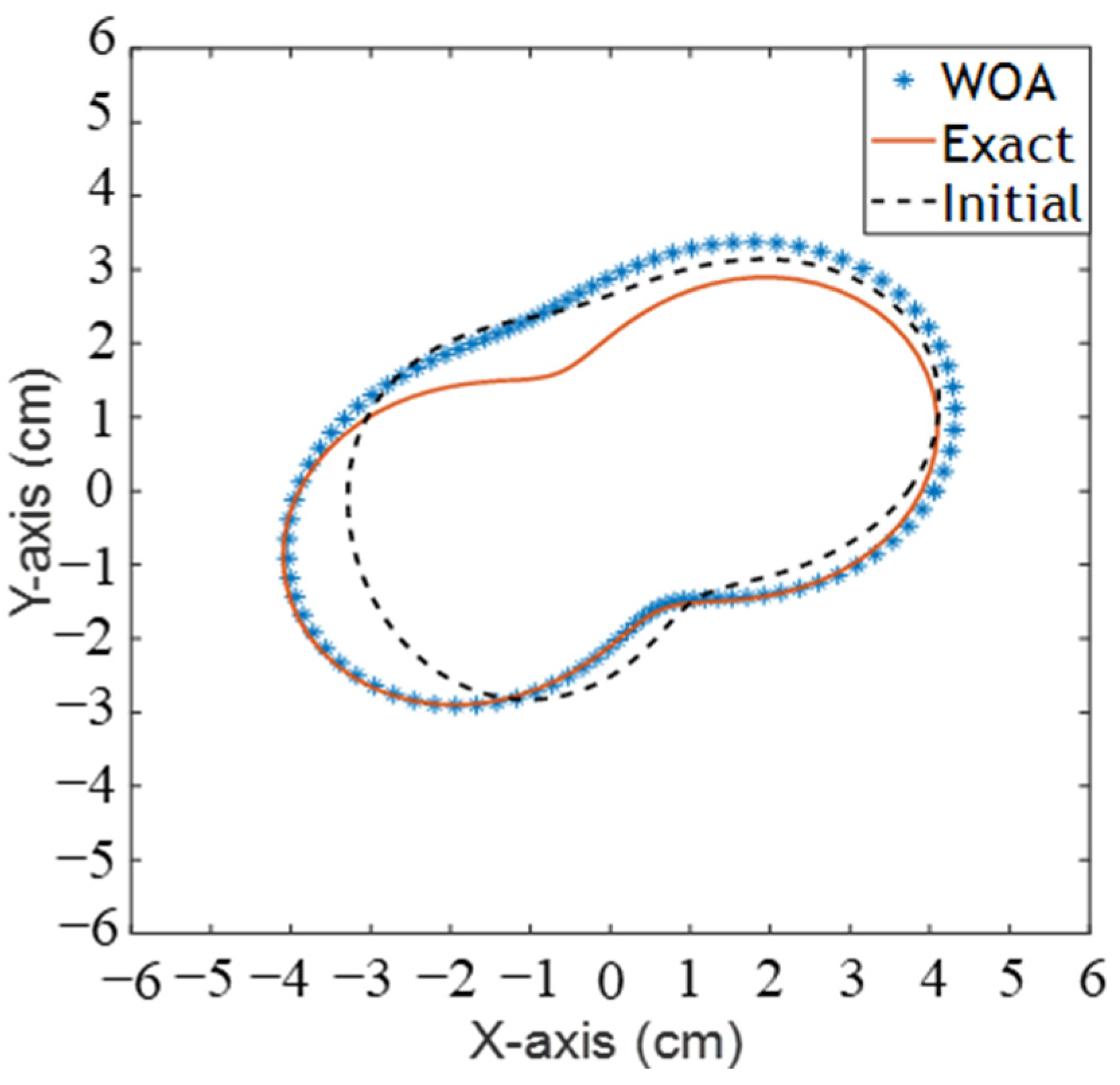
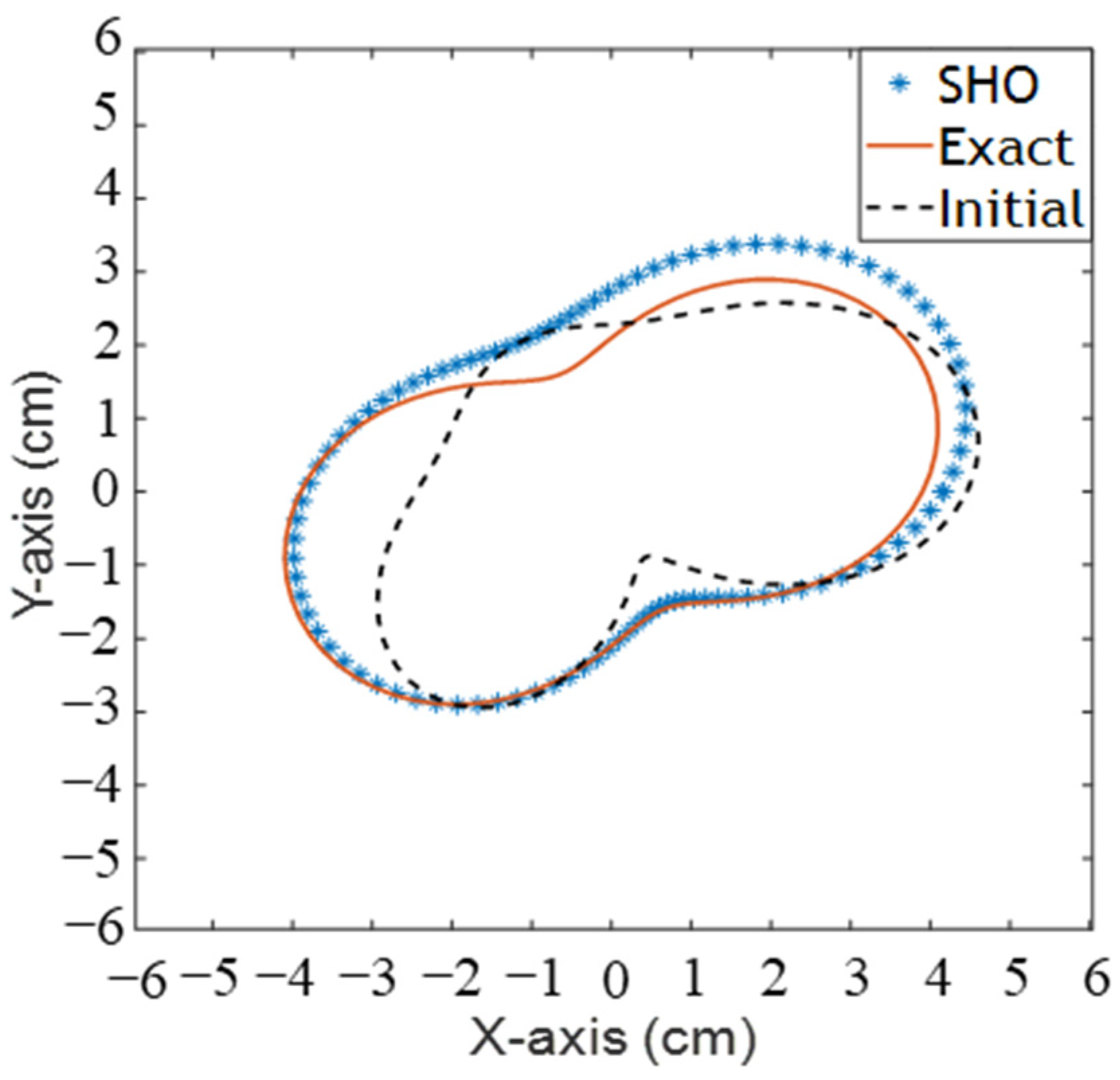
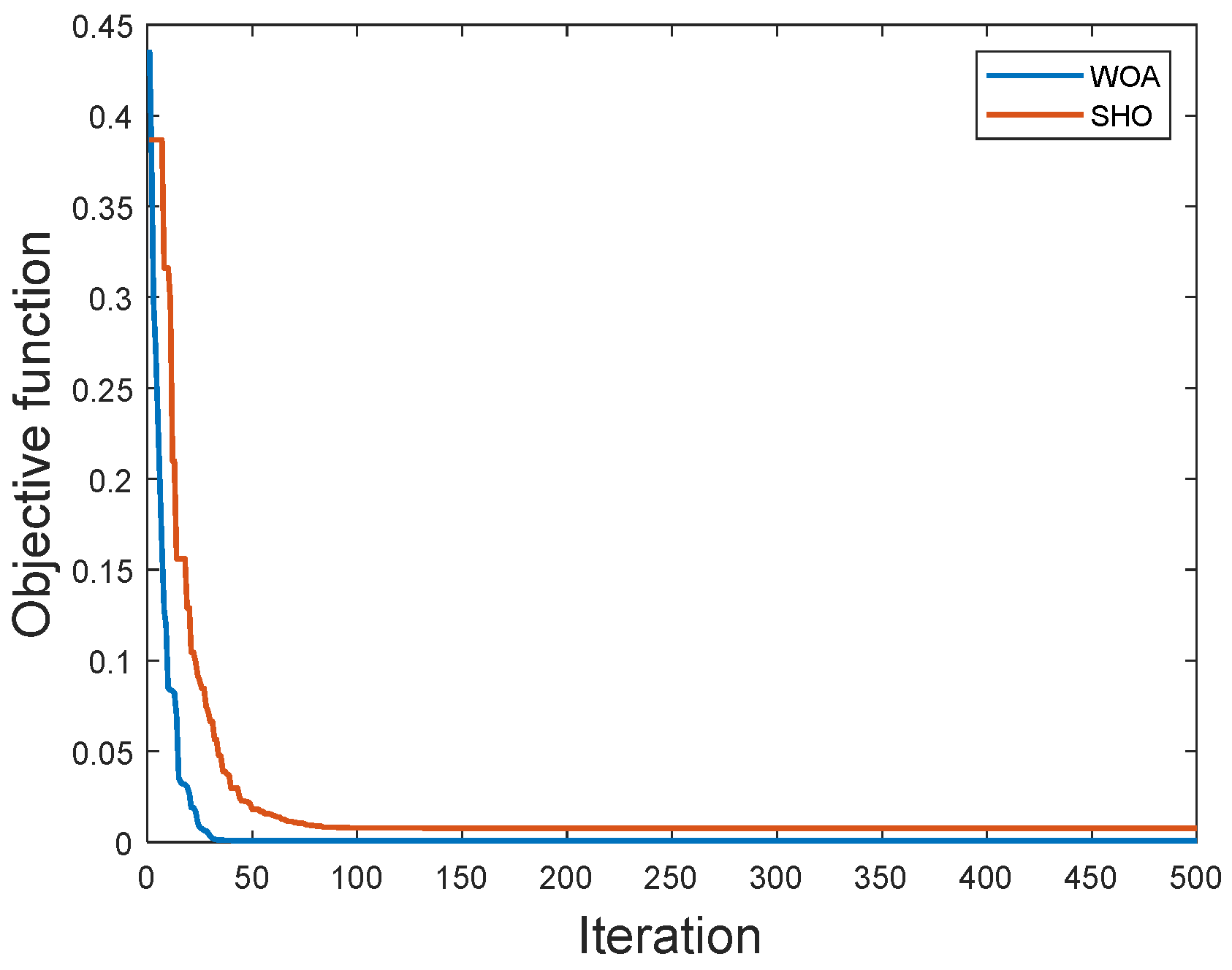
4. Numerical Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lewis, R.M. Physical optics inverse diffraction. IEEE Trans. Antennas Propag. 1969, 17, 308–314. [Google Scholar] [CrossRef]
- Bojarski, N.N. A survey of the physical optics inverse scattering identity. IEEE Trans. Antennas Propag. 1982, 30, 980–989. [Google Scholar] [CrossRef]
- Chu, T.H.; Farhat, N.H. Polarization effects in microwave diversity imaging of perfectly conducting cylinders. IEEE Trans. Antennas Propagar. 1989, 37, 235–244. [Google Scholar] [CrossRef]
- Ge, D.B. A study of Lewis method for target-shape reconstruction. Inverse Probl. 1990, 6, 363–370. [Google Scholar] [CrossRef]
- Chu, T.H.; Lin, D.B. Microwave diversity imaging of perfectly conducting objects in the near-field region. IEEE Trans. Microw. Theory Tech. 1991, 39, 480–487. [Google Scholar]
- Harrmgton, R.F. Field Computation by Moment Method; Wiley-IEEE Press: New York, MA, USA, 1968. [Google Scholar]
- Roger, A. Newton-Kantorovitch algorithm applied to an electromagnetic inverse problem. IEEE Trans. Antennas Propag. 1981, 29, 232–238. [Google Scholar] [CrossRef]
- Tobocman, W. Inverse acoustic wave scattering in two dimensions from impenetrable targets. Inverse Probl. 1989, 5, 1131–1144. [Google Scholar] [CrossRef]
- Chiu, C.C.; Kiang, Y.M. Electromagnetic imaging for an imperfectly conducting cylinder. IEEE Trans. Microw. Theory Tech. 1991, 39, 1631–1639. [Google Scholar]
- Otto, G.P.; Chew, W.C. Microwave Inverse Scattering-Local Shape Function Imaging for Improved Resolution of Strong Scatters. IEEE Trans. Microw. Theory Tech. 1994, 42, 137–141. [Google Scholar] [CrossRef]
- Colton, D.; Monk, P. Anovel method for solving the inverse scattering problem for time-harmonic acoustic waves in the resonance region D. SIAMJ. Appl. Math. 1986, 46, 506–523. [Google Scholar] [CrossRef]
- Kirsch, A.; Kress, R.; Monk, P.; Zinn, A. Two methods for solving the inverse acoustic scattering problem. Inverse Probl. 1988, 4, 749–770. [Google Scholar] [CrossRef]
- Hettlich, F. Two methods for solving an inverse conductive scattering problem. Inverse Probl. 1994, 10, 375–385. [Google Scholar] [CrossRef]
- Caorsi, S.; Gragnani, G.L.; Pastorina, M. An approach to microwave imaging using a multiview moment method solution for a two-dimensional infinite cylinder. IEEE Trans. Microw. Theory Tech. 1991, 39, 1062–1067. [Google Scholar] [CrossRef]
- Zheng, X.; Hu, B. Analysis of Incident Field Polarization of A DDA Based Inverse Scattering Imaging Algorithm. In Proceedings of the 2021 13th International Symposium on Antennas, Propagation and EM Theory (ISAPE), Zhuhai, China, 1–4 December 2021. [Google Scholar]
- Holland, J.H. Adaptation in Natural and Artificial System; University of Michigan Press: Ann Arbor, MI, USA, 1975. [Google Scholar]
- Chiu, C.C.; Yen, C.Y.; Lee, G.Z. Dielectric Objects Reconstruction by Combining Subspace-based Algorithm and Randomly Global Optimization Algorithm. J. Electromagn. Waves Appl. 2018, 32, 77–91. [Google Scholar] [CrossRef]
- Chien, W.; Chiu, C.C.; Chen, P.H.; Jiang, H.; Chan, S.J. Imaging of Rough Surfaces by Near-Field Measurement. Sens. Mater. 2021, 33, 2333–2344. [Google Scholar] [CrossRef]
- Mirjalili, S.; Lewis, A. The Whale Optimization Algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Ling, Y.; Zhou, Y.; Luo, Q. Levy Flight Trajectory-Based Whale Optimization Algorithm for Global Optimization. IEEE Access Brows. J. Mag. 2017, 5, 6168–6186. [Google Scholar] [CrossRef]
- Yan, Z.H.; Sha, J.X.; Liu, B.; Lu, J. An Ameliorative Whale Optimization Algorithm for Multi—Objective Optimal Allocation of Water Resources in Handan, China. Water 2018, 10, 87. [Google Scholar] [CrossRef]
- Lee, K.C.; Lu, P.T. Application of Whale Optimization Algorithm to Inverse Scattering of an Imperfect Conductor with Corners. Int. J. Antennas Propag. 2020, 2020, 8205797. [Google Scholar] [CrossRef]
- Chakraborty, S.; Saha, A.K.; Sharma, S.; Mirjalili, S.; Chakraborty, R. A novel enhanced whale optimization algorithm for global optimization. Comput. Ind. Eng. 2021, 153, 107086. [Google Scholar] [CrossRef]
- Lin, X.; Yu, X.; Li, W. A heuristic whale optimization algorithm with niching strategy for global multi-dimensional engineering optimization. Comput. Ind. Eng. 2022, 171, 108361. [Google Scholar] [CrossRef]
- Dhiman, G.; Kaura, V. Spotted hyena optimizer: A novel bio-inspired based metaheuristic technique for engineering applications. Adv. Eng. Softw. 2017, 114, 48–70. [Google Scholar] [CrossRef]
- Dhiman, G.; Kaur, A. Spotted Hyena Optimizer for Solving Engineering Design Problems. In Proceedings of the 2017 International Conference on Machine Learning and Data Science (MLDS), Noida, India, 14–15 December 2017; pp. 114–119. [Google Scholar]
- Sukpancharoen, S. Application of Spotted Hyena Optimizer in Cogeneration Power Plant on Single and Multiple-Objective. In Proceedings of the 2021 IEEE 11th Annual Computing and Communication Workshop and Conference (CCWC), Las Vegas, NV, USA, 27–30 January 2021; pp. 0001–0005. [Google Scholar]
- Yi, Z.; Sun, X.B.; Li, Z.; Yang, S.X.; Sun, Y.F. Research on Three-Phase Unbalanced Commutation Strategy Based on the Spotted Hyena Optimizer Algorithm. Complexity 2022, 2022, 1–10. [Google Scholar]
- Vega, E.; Soto, R.; Crawford, B.; Peña, J.; Contreras, P.; Castrob, C. Predicting population size and termination criteria in metaheuristics: A case study based on spotted hyena optimizer and crow search algorithm. Appl. Soft Comput. 2022, 128, 109513. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | SHO | WOA | |
|---|---|---|---|
| Resources | |||
| Memory | 2G | 2G | |
| Time | 843 sec | 845 sec | |
| Method | SHO | WOA | |
|---|---|---|---|
| Example | |||
| Example 1 | 4.7% | 1.5% | |
| Example 2 | 14.0% | 11.6% | |
| Example 3 | 14.6% | 12.3% | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chiu, C.-C.; Chen, P.-H.; Chien, W.; Lim, E.H.; Chen, G.-Z. Microwave Imaging for Half-Space Conductors Using the Whale Optimization Algorithm and the Spotted Hyena Optimizer. Appl. Sci. 2023, 13, 5857. https://doi.org/10.3390/app13105857
Chiu C-C, Chen P-H, Chien W, Lim EH, Chen G-Z. Microwave Imaging for Half-Space Conductors Using the Whale Optimization Algorithm and the Spotted Hyena Optimizer. Applied Sciences. 2023; 13(10):5857. https://doi.org/10.3390/app13105857
Chicago/Turabian StyleChiu, Chien-Ching, Po-Hsiang Chen, Wei Chien, Eng Hock Lim, and Guo-Zheng Chen. 2023. "Microwave Imaging for Half-Space Conductors Using the Whale Optimization Algorithm and the Spotted Hyena Optimizer" Applied Sciences 13, no. 10: 5857. https://doi.org/10.3390/app13105857