
Novel Energy Management Scheme for a Permanent Magnet Electric Drive-Based Hybrid Vehicle Using Model Predictive Control


Abstract
:1. Introduction
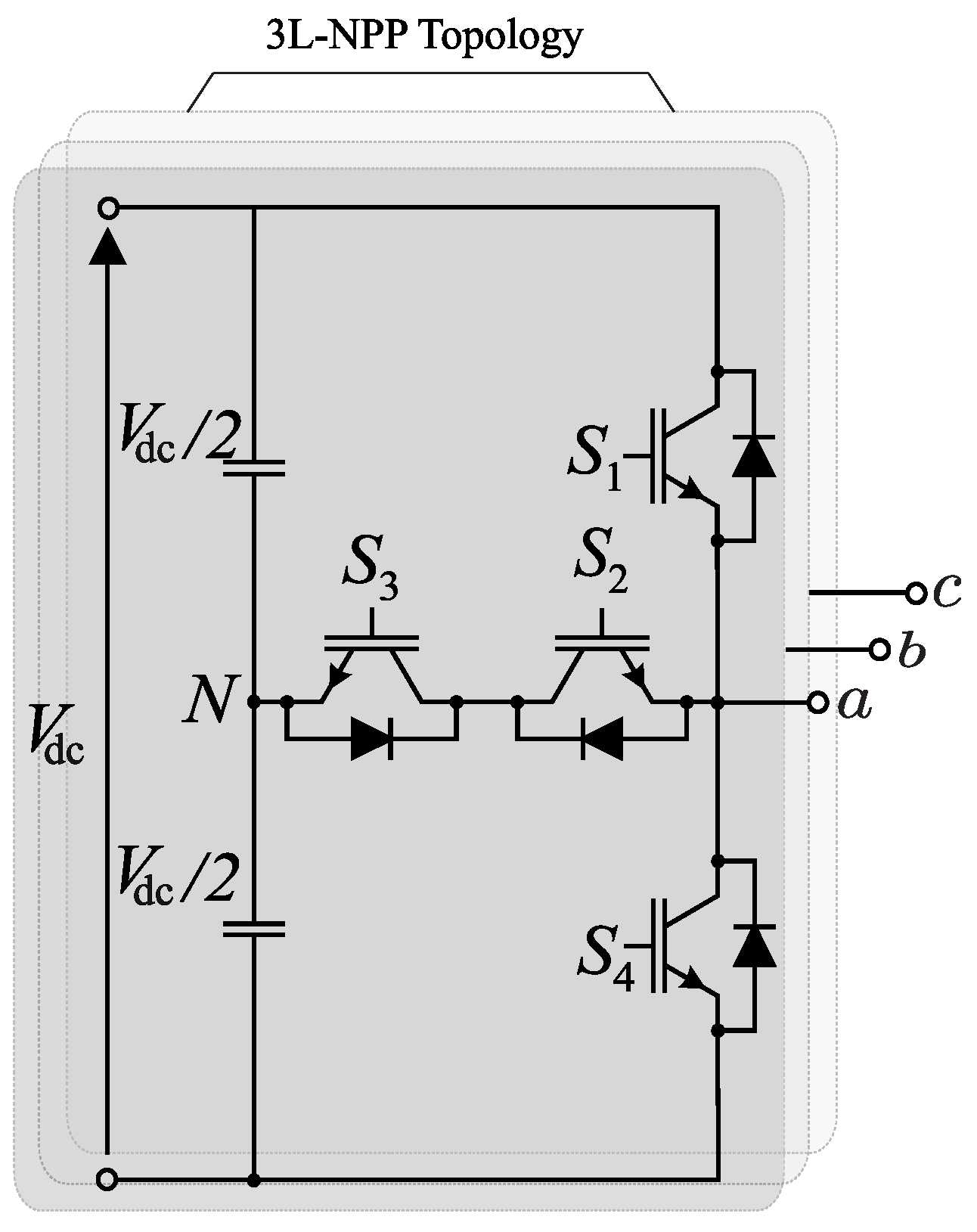
1.1. Inverter Topology
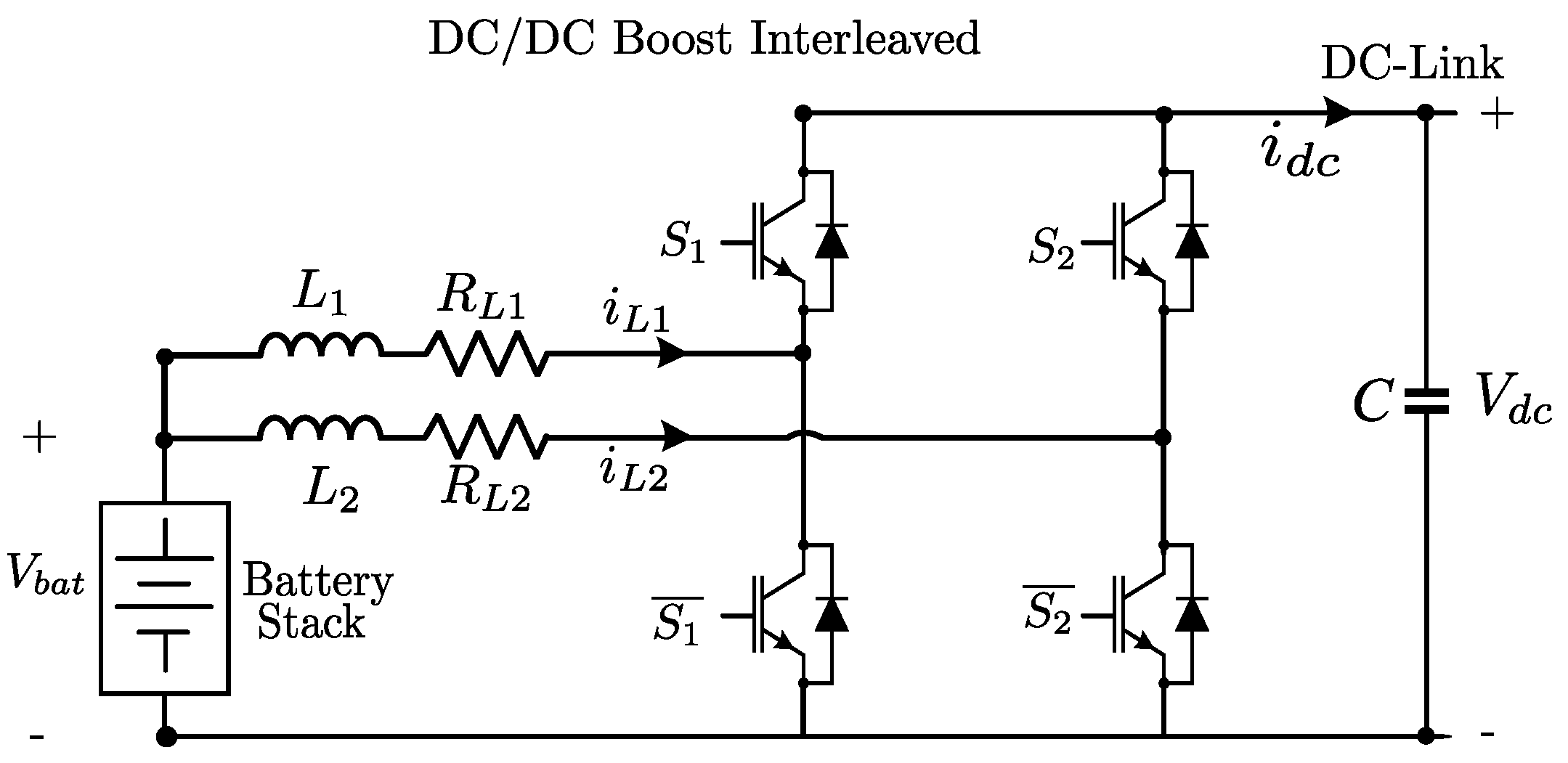
1.2. Bidirectional DC-DC Converter
1.3. Permanent Magnet Synchronous Machine Mathematical Model
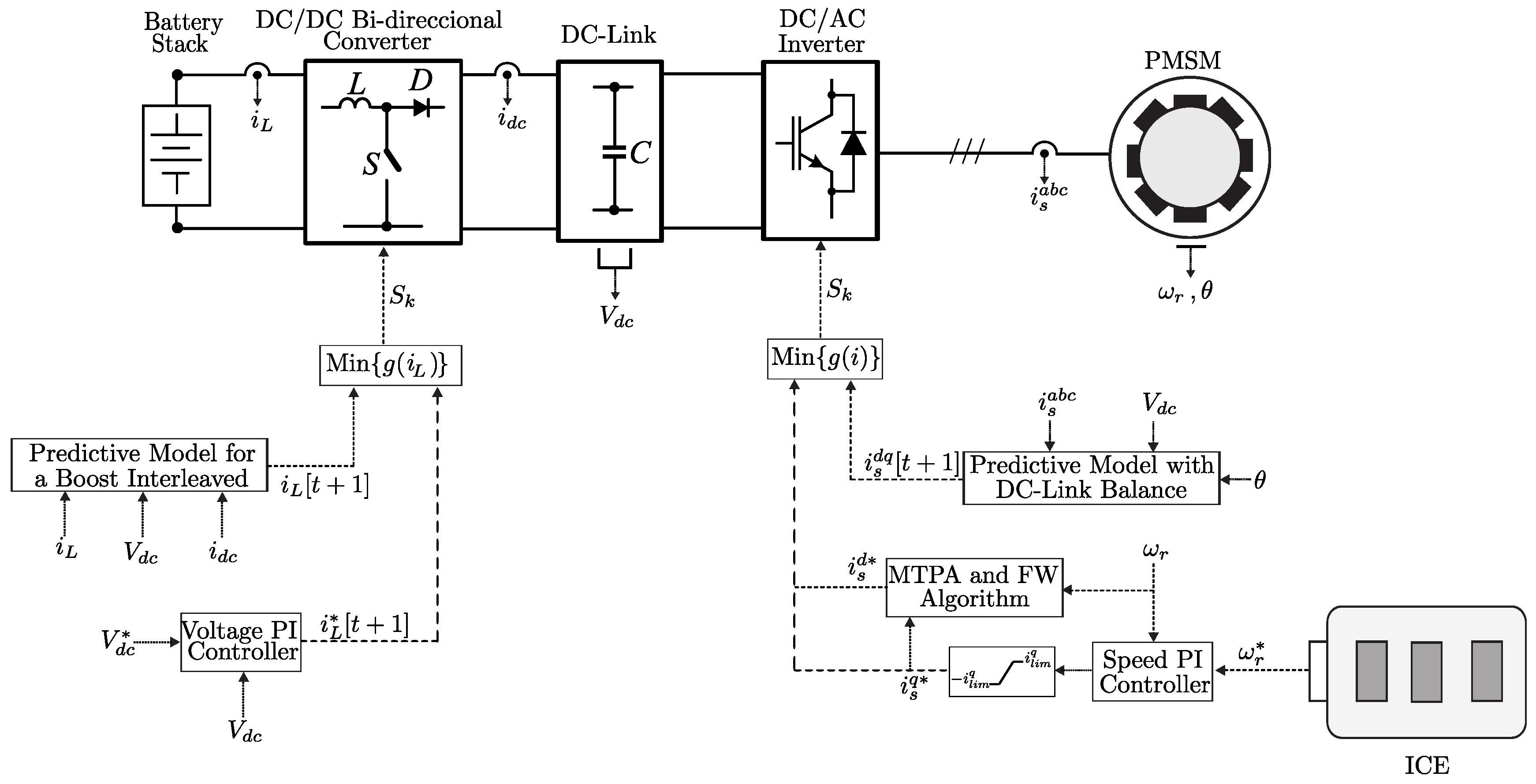
2. Control Scheme
2.1. Model Predictive Control of the DC/DC Interleaved Converter
2.1.1. Converter Prediction Model
2.1.2. Input Current Control
2.1.3. Current Cost Function
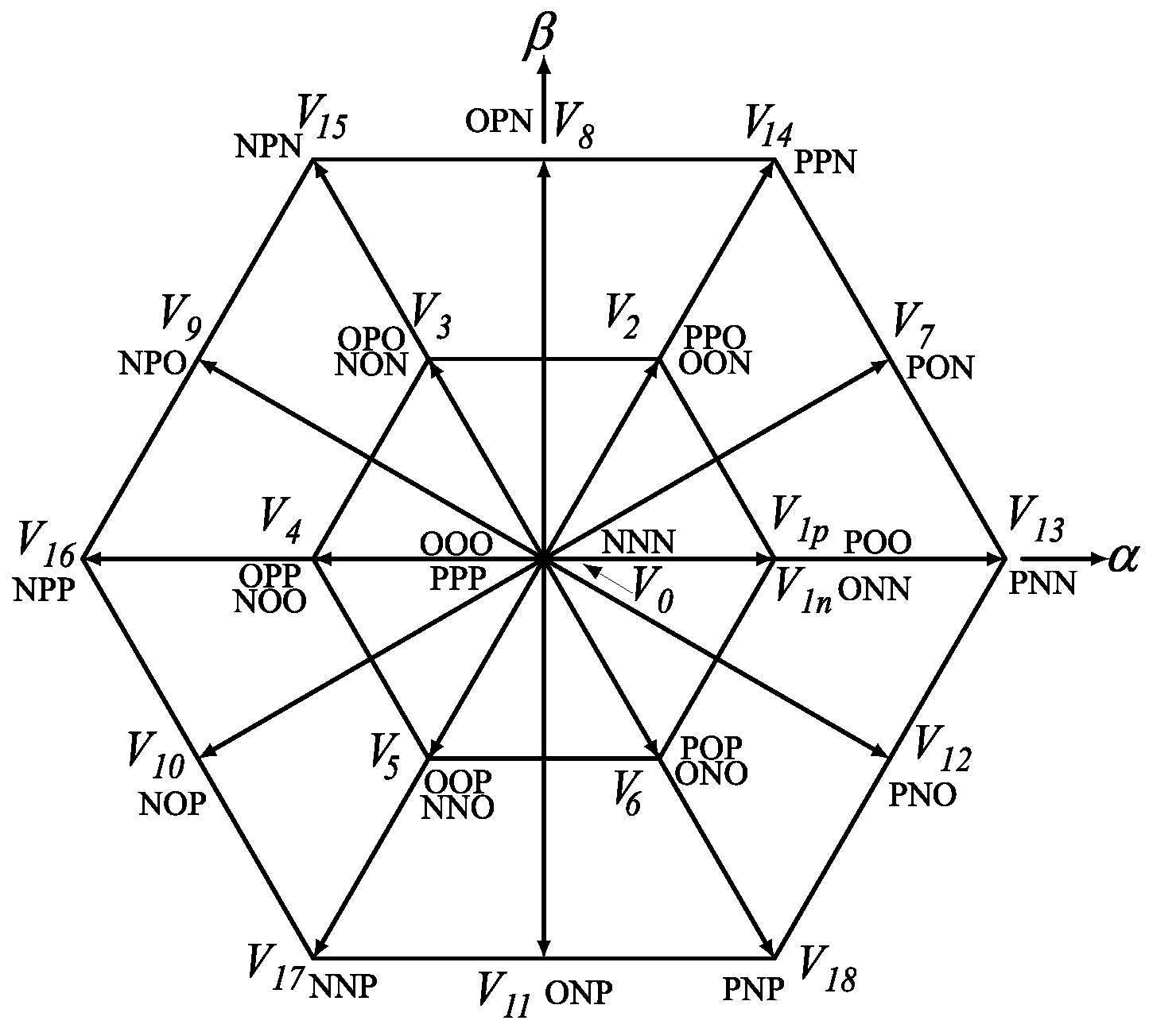
2.2. Model Predictive Control of the Inverter
2.2.1. Current Prediction Model
2.2.2. DC-Link Voltage Prediction Model
2.2.3. Cost Function
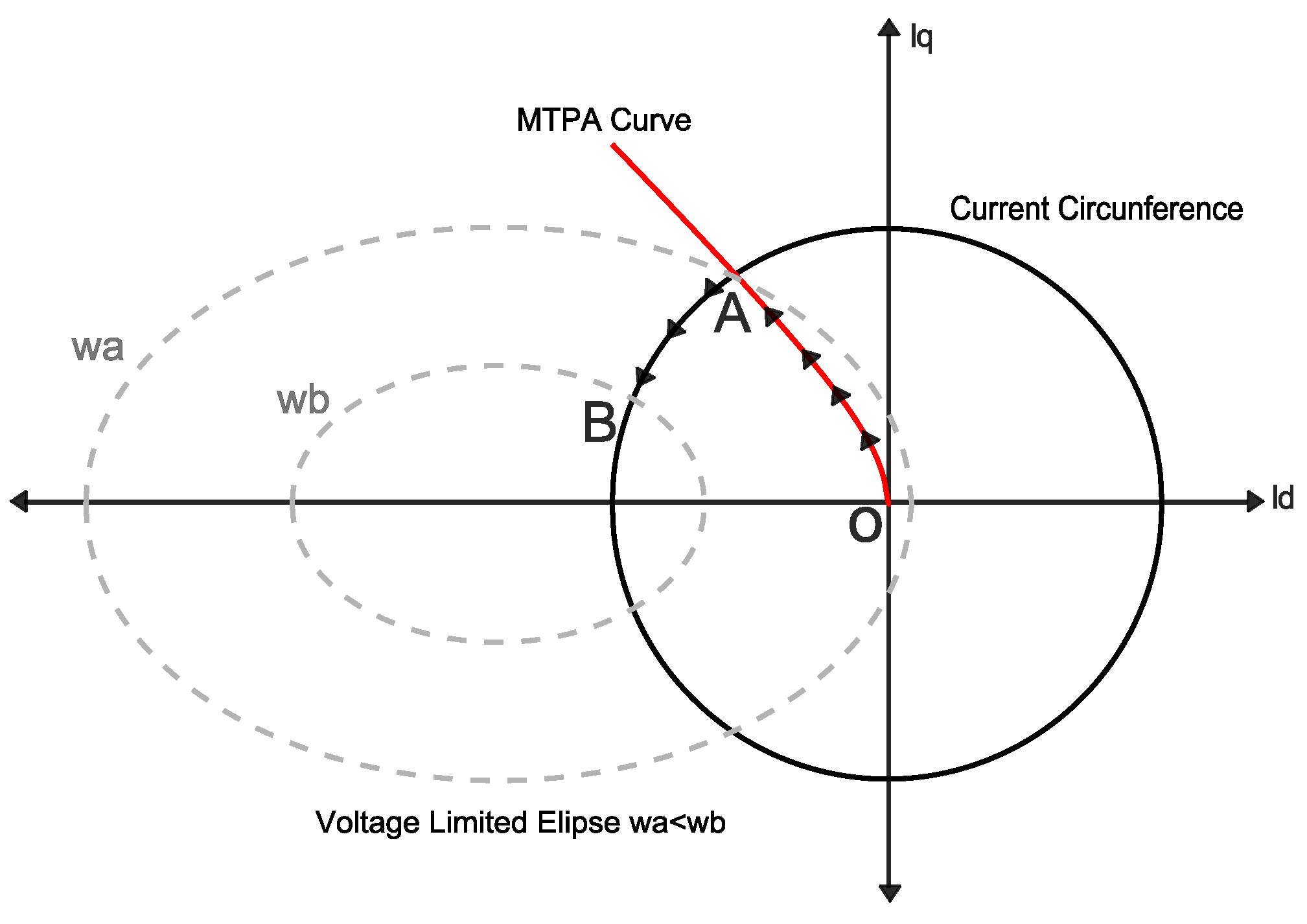
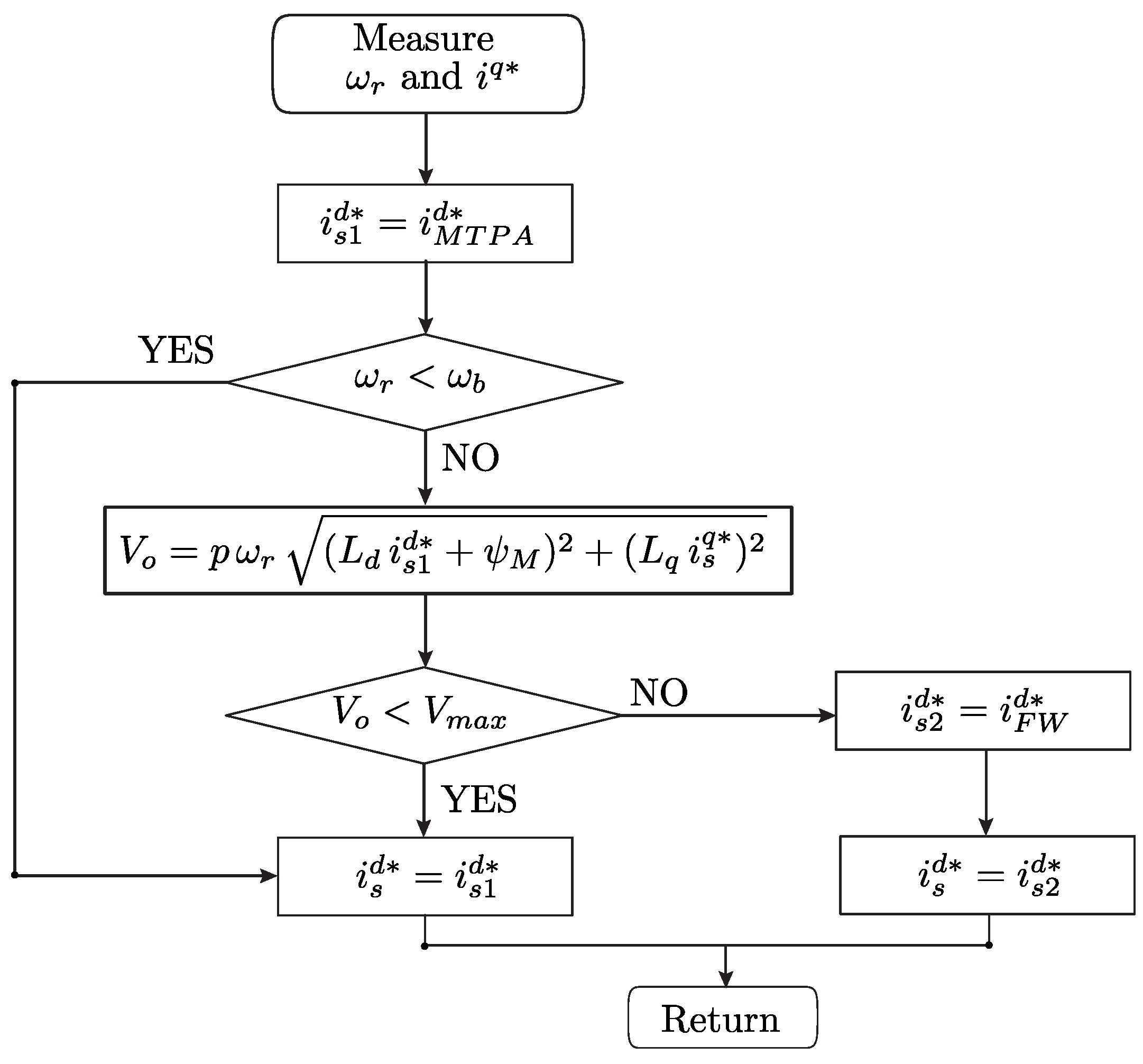
2.2.4. Speed Control and MTPA Technique
2.3. Convergence of the MPC Algorithm
3. Vehicle Dynamics
4. Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Lai, J.S.; Nelson, D.J. Energy Management Power Converters in Hybrid Electric and Fuel Cell Vehicles. Proc. IEEE 2007, 95, 766–777. [Google Scholar] [CrossRef]
- Tao, H.; Kotsopoulos, A.; Duarte, J.; Hendrix, M. Multi-input bidirectional DC-DC converter combining DC-link and magnetic-coupling for fuel cell systems. In Proceedings of the Fourtieth IAS Annual Meeting. Conference Record of the 2005 Industry Applications Conference, 2005, Hong Kong, China,, 2–6 October 2005; Volume 3, pp. 2021–2028. [Google Scholar] [CrossRef]
- Tao, H.; Duarte, J.L.; Hendrix, M.A.M. High-Power Three-Port Three-Phase Bidirectional DC-DC Converter. In Proceedings of the 2007 IEEE Industry Applications Annual Meeting, New Orleans, LA, USA, 23–27 September 2007; pp. 2022–2029. [Google Scholar] [CrossRef]
- Chiu, H.J.; Huang, H.M.; Lin, L.W.; Tseng, M.H. A multiple-input DC/DC converter for renewable energy systems. In Proceedings of the 2005 IEEE International Conference on Industrial Technology, Hong Kong, China, 14–17 December 2005; pp. 1304–1308. [Google Scholar] [CrossRef]
- Su, G.J.; Cunningham, J.P.; Tang, L. A Reduced-Part, Triple-Voltage DC-DC Converter for Electric Vehicle Power Management. In Proceedings of the 2007 IEEE Power Electronics Specialists Conference, Orlando, FL, USA, 17–21 June 2007; pp. 1989–1994. [Google Scholar] [CrossRef]
- Mishima, T.; Hiraki, E.; Tanaka, T.; Nakaoka, M. A New Soft-Switched Bidirectional DC-DC Converter Topology for Automotive High Voltage DC Bus Architectures. In Proceedings of the 2006 IEEE Vehicle Power and Propulsion Conference, Windsor, UK, 6–8 September 2006; pp. 1–6. [Google Scholar] [CrossRef]
- Matsuo, H.; Lin, W.; Kurokawa, F.; Shigemizu, T.; Watanabe, N. Characteristics of the multiple-input DC-DC converter. IEEE Trans. Ind. Electron. 2004, 51, 625–631. [Google Scholar] [CrossRef]
- Hu, Y.; Tatler, J.; Chen, Z. A bidirectional DC/DC power electronic converter for an energy storage device in an autonomous power system. In Proceedings of the 4th International Power Electronics and Motion Control Conference, 2004. IPEMC 2004, Xi’an, China, 14–16 August 2004; Volume 1, pp. 171–176. [Google Scholar]
- Zhang, Z.; Liu, X. An Improved Super-Twisting Sliding Mode Single-Loop Control with Current-Constraint for PMSM Based on Two-Time Scale Disturbance Observer. IEEE Trans. Transp. Electrif. 2023, 1. [Google Scholar] [CrossRef]
- Zhang, J.; Ren, W.; Sun, X.M. Current-Constrained Adaptive Robust Control for Uncertain PMSM Drive Systems: Theory and Experimentation. IEEE Trans. Transp. Electrif. 2023, 9, 4158–4169. [Google Scholar] [CrossRef]
- Li, X.; Xie, M.; Ji, M.; Yang, J.; Wu, X.; Shen, G. Restraint of Common-Mode Voltage for PMSM-Inverter Systems with Current Ripple Constraint Based on Voltage-Vector MPC. IEEE J. Emerg. Sel. Top. Ind. Electron. 2023, 4, 688–697. [Google Scholar] [CrossRef]
- Kouro, S.; Perez, M.A.; Rodriguez, J.; Llor, A.M.; Young, H.A. Model Predictive Control: MPC’s Role in the Evolution of Power Electronics. IEEE Ind. Electron. Mag. 2015, 9, 8–21. [Google Scholar] [CrossRef]
- Dai, S.; Wang, J.; Sun, Z.; Chong, E. Transient Performance Improvement of Deadbeat Predictive Current Control of High-Speed Surface-Mounted PMSM Drives by Online Inductance Identification. IEEE Trans. Ind. Electron. 2022, 69, 12358–12368. [Google Scholar] [CrossRef]
- Rodriguez, J.; Garcia, C.; Mora, A.; Flores-Bahamonde, F.; Acuna, P.; Novak, M.; Zhang, Y.; Tarisciotti, L.; Davari, S.A.; Zhang, Z.; et al. Latest Advances of Model Predictive Control in Electrical Drives—Part I: Basic Concepts and Advanced Strategies. IEEE Trans. Power Electron. 2022, 37, 3927–3942. [Google Scholar] [CrossRef]
- Rodriguez, J.; Garcia, C.; Mora, A.; Davari, S.A.; Rodas, J.; Valencia, D.F.; Elmorshedy, M.; Wang, F.; Zuo, K.; Tarisciotti, L.; et al. Latest Advances of Model Predictive Control in Electrical Drives—Part II: Applications and Benchmarking with Classical Control Methods. IEEE Trans. Power Electron. 2022, 37, 5047–5061. [Google Scholar] [CrossRef]
- Matsuo, H.; Kurokawa, F. New Solar Cell Power Supply System Using a Boost Type Bidirectinal DC-DC Converter. IEEE Trans. Ind. Electron. 1984, IE-31, 51–55. [Google Scholar] [CrossRef]
- Chiu, H.J.; Lin, L.W. A bidirectional DC–DC converter for fuel cell electric vehicle driving system. IEEE Trans. Power Electron. 2006, 21, 950–958. [Google Scholar] [CrossRef]
- Chen, G.; Xu, D.; Wang, Y.; Lee, Y.S. A new family of soft-switching phase-shift bidirectional DC-DC converters. In Proceedings of the 2001 IEEE 32nd Annual Power Electronics Specialists Conference (IEEE Cat. No.01CH37230), Vancouver, BC, Canada, 17–21 June 2001; Volume 2, pp. 859–865. [Google Scholar] [CrossRef]
- Chen, G.; Xu, D.; Lee, Y.S. A family of soft-switching phase-shift bidirectional DC-DC converters: Synthesis, analysis, and experiment. In Proceedings of the Power Conversion Conference-Osaka 2002 (Cat. No.02TH8579), Osaka, Japan, 2–5 April 2002; Volume 1, pp. 122–127. [Google Scholar] [CrossRef]
- Fan, H.; Xu, D. A family of PWM plus phase-shift bidirectional DC-DC converters. In Proceedings of the 2004 IEEE 35th Annual Power Electronics Specialists Conference (IEEE Cat. No.04CH37551), Aachen, Germany, 20–25 June 2004; Volume 2, pp. 1668–1674. [Google Scholar] [CrossRef]
- Karamanakos, P.; Papafotiou, G.; Manias, S.N. Model predictive control of the interleaved DC-DC boost converter. In Proceedings of the 15th International Conference on System Theory, Control and Computing, Sinaia, Romania, 14–16 October 2011; pp. 1–6. [Google Scholar]
- Cheng, L.; Acuna, P.; Aguilera, R.P.; Ciobotaru, M.; Jiang, J. Model predictive control for DC-DC boost converters with constant switching frequency. In Proceedings of the 2016 IEEE 2nd Annual Southern Power Electronics Conference (SPEC), Auckland, New Zealand, 5–8 December 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Karamanakos, P.; Liegmann, E.; Geyer, T.; Kennel, R. Model Predictive Control of Power Electronic Systems: Methods, Results, and Challenges. IEEE Open J. Ind. Appl. 2020, 1, 95–114. [Google Scholar] [CrossRef]
- Villarroel, F.A.; Espinoza, J.R.; Pérez, M.A.; Ramírez, R.O.; Baier, C.R.; Sbárbaro, D.; Silva, J.J.; Reyes, M.A. Stable Shortest Horizon FCS-MPC Output Voltage Control in Non-Minimum Phase Boost-Type Converters Based on Input-State Linearization. IEEE Trans. Energy Convers. 2021, 36, 1378–1391. [Google Scholar] [CrossRef]
- Villarroel, F.; Espinoza, J.; Pérez, M.; Sbárbaro, D.; Ramírez, R.; Baier, C. A new discretization method of model equations for predictive power converter control applications based on input-state linearization. In Proceedings of the IECON 2022—48th Annual Conference of the IEEE Industrial Electronics Society, Brussels, Belgium, 17–20 October 2022; pp. 1–5. [Google Scholar] [CrossRef]
- Nguyen, D.-L.; Vu, H.-C.; Tran, Q.-H.; Lee, H.-H. Model Predictive Control for Voltage Regulation in Bidirectional Boost Converter. In Intelligent Computing Methodologies, Proceedings of the 18th International Conference, ICIC 2022, Xi’an, China, August 7–11, 2022; Springer: Cham, Switzerland, 2022; pp. 484–491. [Google Scholar] [CrossRef]
- Xing, X.; Chen, A.; Zhang, Z.; Chen, J.; Zhang, C. Model predictive control method to reduce common-mode voltage and balance the neutral-point voltage in three-level T-type inverter. In Proceedings of the 2016 IEEE Applied Power Electronics Conference and Exposition (APEC), Long Beach, CA, USA, 20–24 March 2016; pp. 3453–3458. [Google Scholar] [CrossRef]
- Maciejowski, J.M. Predictive Control with Constraints; Prentice Hall: Upper Saddle River, NJ, USA, 2002; p. 352. [Google Scholar]
- Mayne, D.; Rawlings, J.; Rao, C.; Scokaert, P. Constrained model predictive control: Stability and optimality. Automatica 2000, 36, 789–814. [Google Scholar] [CrossRef]
- Grimm, G.; Messina, M.J.; Tuna, S.E.; Teel, A.R. Nominally Robust Model Predictive Control With State Constraints. IEEE Trans. Autom. Control 2007, 52, 1856–1870. [Google Scholar] [CrossRef]
- Hayes, J.G.; Goodarzi, G.A. Book review: Electric Powertrain: Energy Systems, Power Electronics and Drives for Hybrid, Electric and Fuel Cell Vehicles (Miller, J.M.) [Book review]. IEEE Aerosp. Electron. Syst. Mag. 2019, 34, 46–47. [Google Scholar] [CrossRef]
- US-Environmental Protection Agency (EPA). Data on Cars Used for Testing Fuel Economy. 2023. Available online: https://www.epa.gov/compliance-and-fuel-economy-data/data-cars-used-testing-fuel-economy (accessed on 1 September 2023).
- EPA Highway Fuel Economy Test Cycle (HWFET). 2023. Available online: https://dieselnet.com/standards/cycles/hwfet.php#:~:text=Time%2Dspeed%20data%20points%20%7C%2010,CFR%20600%2C%20subpart%20B%5D%20 (accessed on 1 September 2023).
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Switching State | |||||
|---|---|---|---|---|---|
| P | 1 | 1 | 0 | 0 | |
| O | 0 | 1 | 1 | 0 | 0 |
| N | 0 | 0 | 1 | 1 |
| Parameter | Value | |
|---|---|---|
| NPP module parameters | ||
| DC-Link voltage | 400 (V) | |
| DC-Link capacitor | 5 (mF) | |
| PMSM parameters | ||
| Nominal stator current | 500 (A) | |
| Base speed | 362 (rad/s) | |
| Maximum torque | 530 (Nm) | |
| Stator resistance | 10 (m) | |
| Direct-axis stator inductance | 28 (H) | |
| Quadrature-axis stator inductance | 34 (H) | |
| PM flux linkage | 0.025 (Wb) | |
| p | Pole pairs | 20 |
| J | Moment of inertia | 0.02 (Kgm) |
| DC/DC Boost interleaved parameters | ||
| Battery voltage | 200 (V) | |
| L | Converter inductance | 8.6 (mH) |
| Inductance’s resistance | 0.1 () | |
| Vehicle parameters [32] | ||
| m | Weight | 1531 (kg) |
| A | EPA coefficient | 82.3 (Nm) |
| B | EPA coefficient | 0.222 (N/ms) |
| C | EPA coefficient | 0.403 (N/m) |
| Gear ratio | 3.04 (-) | |
| Wheel ratio | 0.313 (m) | |
| Real-time RT-Box parameter | ||
| Time sampling | 10 () |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Reusser, C.; Parra, M.; Stamulis, C.; Vega, A.; Mino, G. Novel Energy Management Scheme for a Permanent Magnet Electric Drive-Based Hybrid Vehicle Using Model Predictive Control. Machines 2024, 12, 3. https://doi.org/10.3390/machines12010003
Reusser C, Parra M, Stamulis C, Vega A, Mino G. Novel Energy Management Scheme for a Permanent Magnet Electric Drive-Based Hybrid Vehicle Using Model Predictive Control. Machines. 2024; 12(1):3. https://doi.org/10.3390/machines12010003
Chicago/Turabian StyleReusser, Carlos, Matías Parra, Cristina Stamulis, Argel Vega, and Gerardo Mino. 2024. "Novel Energy Management Scheme for a Permanent Magnet Electric Drive-Based Hybrid Vehicle Using Model Predictive Control" Machines 12, no. 1: 3. https://doi.org/10.3390/machines12010003