
Revealing Active Mars with HiRISE Digital Terrain Models

 , , , , , , , , , , , , , , and
, , , , , , , , , , , , , , and
Abstract
:1. Introduction
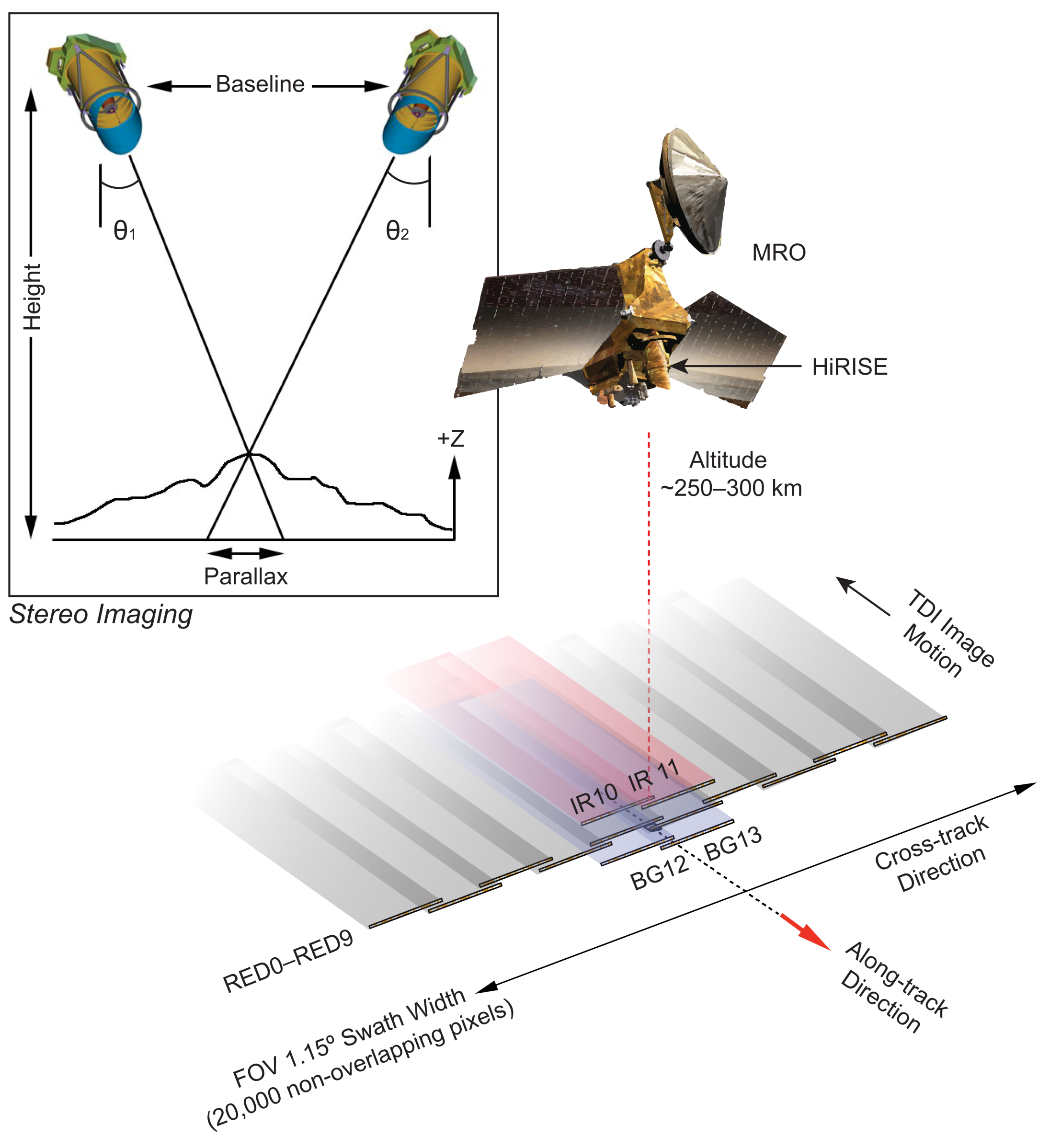
1.1. HiRISE Instrument Characteristics
1.2. MRO/HiRISE Stereo Planning
2. Methods
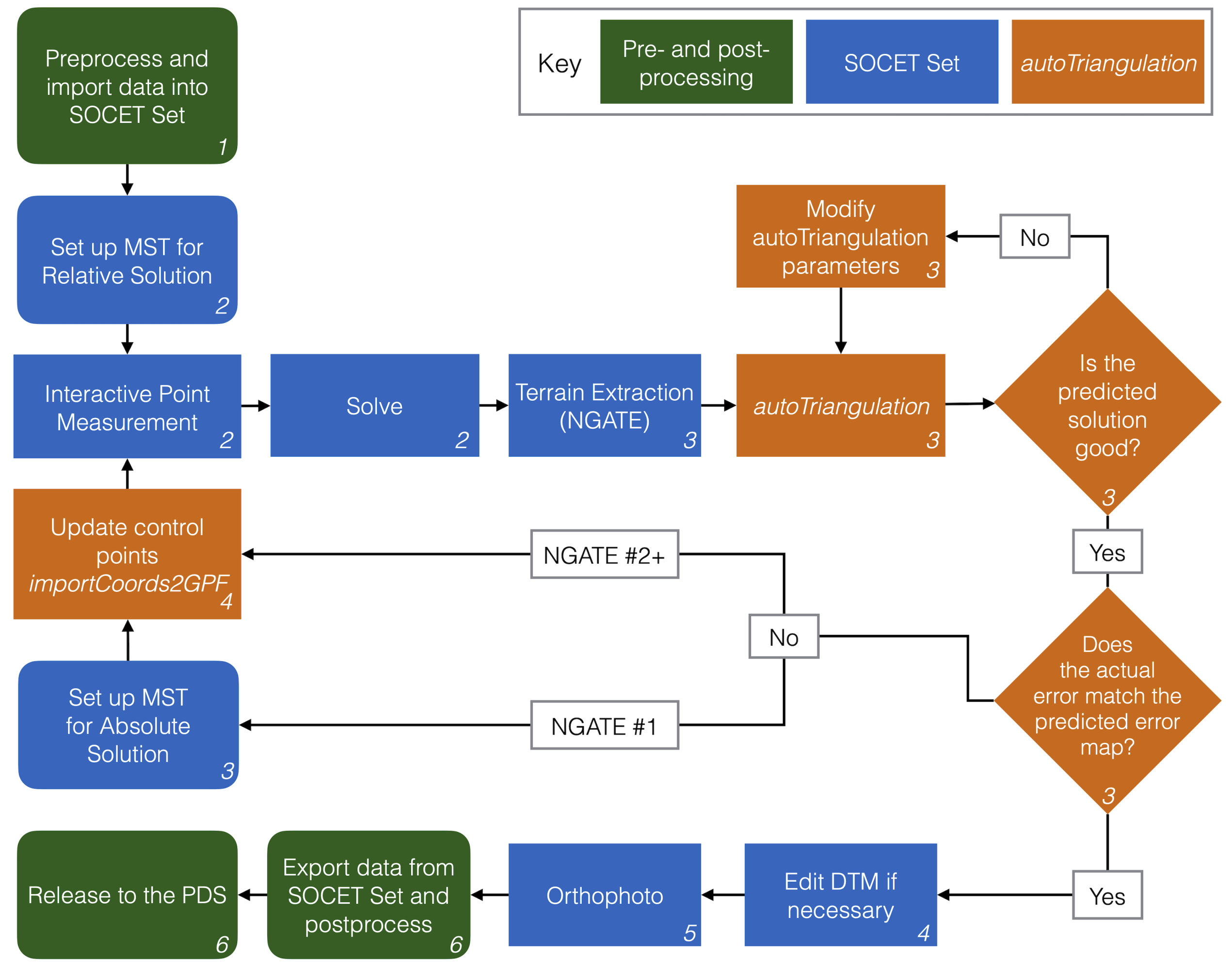
2.1. Creation of DTMs Using ISIS and SOCET Set Workflow
2.1.1. Preprocessing
2.1.2. Bundle Adjustment
2.1.3. Terrain Extraction
2.1.4. Editing
2.1.5. Orthorectification
2.1.6. Post-Processing and Data Archiving
2.2. Tying in Additional Images and DTM Mosaicking
2.2.1. Multiple DTMs for Volumetric Change Detection
2.2.2. Mosaicking of Stereo Pairs for Regional Topography
2.3. Quality Metrics and Sources of Error
2.3.1. Precision, Accuracy and Resolution
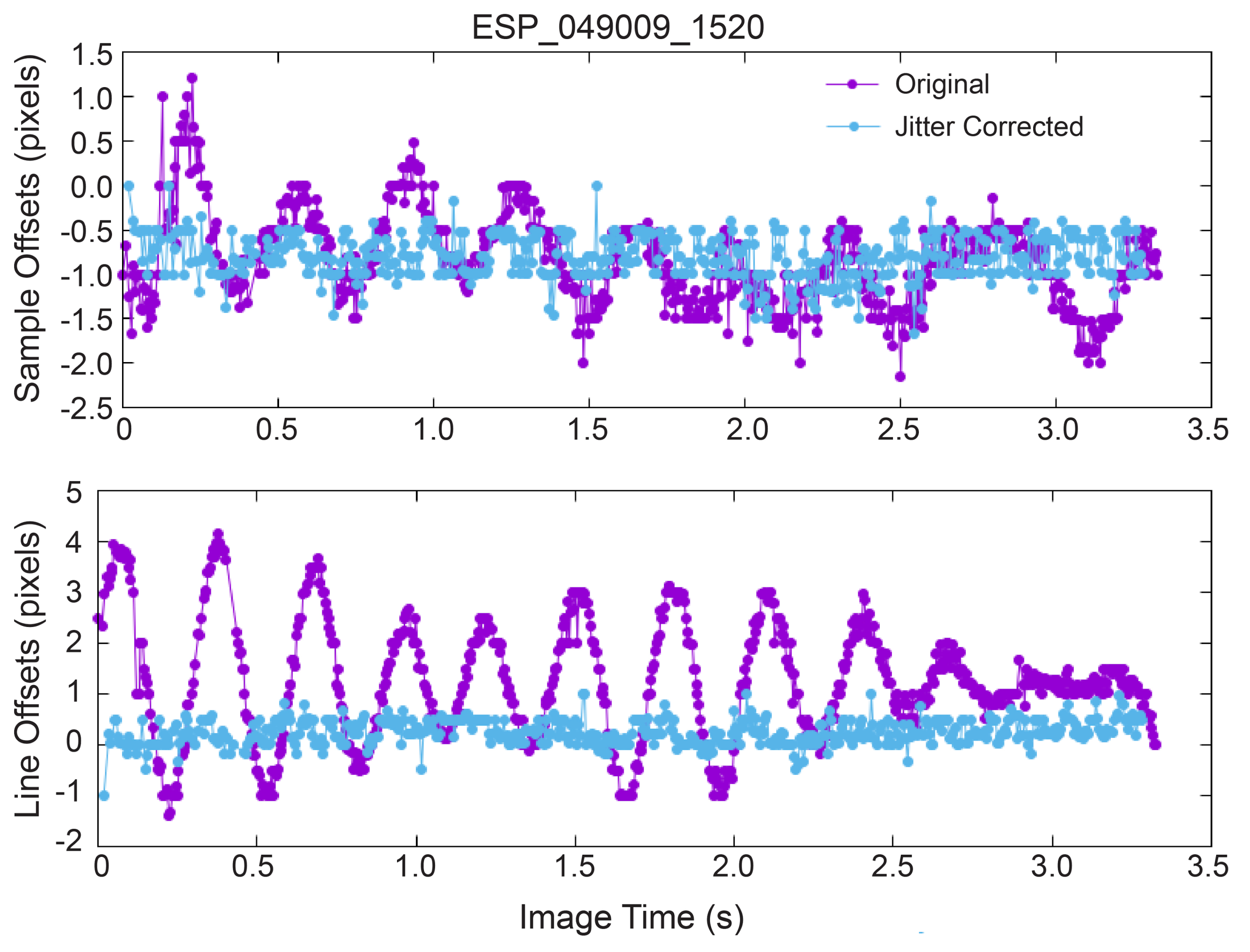
2.3.2. Jitter
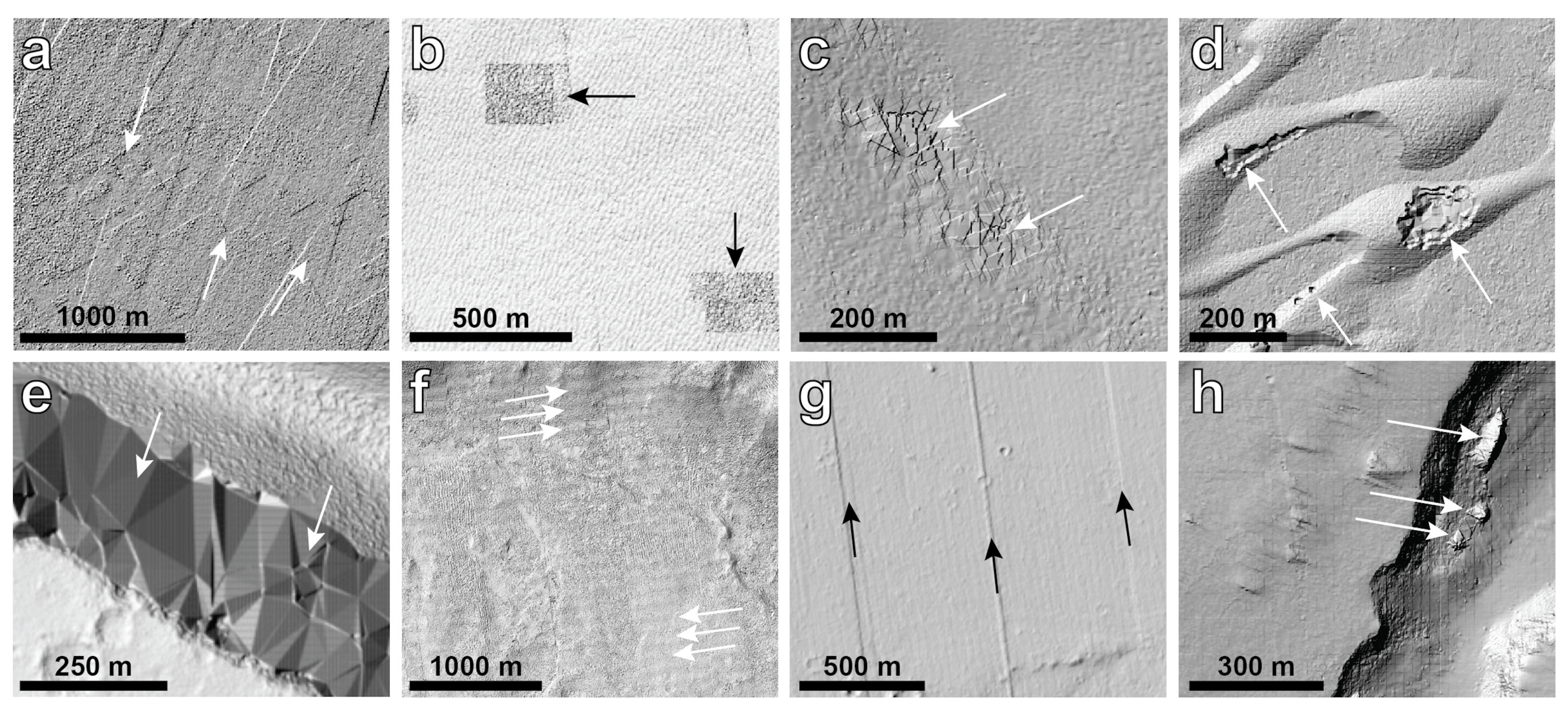
2.3.3. Noise, and Its Effect on Slope Maps
3. Change Detection Studies
3.1. Recurring Slope Lineae
3.2. Aeolian Studies
3.3. Polar Features
3.4. Gullies
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AATE | Adaptive Automatic Terrain Extraction |
| APM | Automatic Point Measurement |
| ASP | Ames Stereo Pipeline |
| BG | Blue-green |
| CCD | Charge-Coupled Device |
| CK | Camera Kernel |
| CTX | Context Camera |
| DEM | Digital Elevation Model |
| DTM | Digital Terrain Model |
| EDR | Engineering Data Record |
| EP | Estimated Vertical Precision |
| GSD | Ground Sample Distance |
| HiRISE | High Resolution Imaging Science Experiment |
| HiROC | HiRISE Operations Center |
| HiSEAS | HiRISE Stereo Effect Analysis Software |
| ICP | Iterative Closest Point |
| IFOV | Instantaneous Field of View |
| IPM | Interactive Point Measurement |
| IR | (Near-)Infrared |
| ISIS | Integrated Software for Imagers and Spectrometers |
| ITE | Interactive Terrain Edit |
| LMST | Local Mean Solar Time |
| MEGDR | Mission Experiment Gridded Data Record |
| MOLA | Mars Orbiter Laser Altimeter |
| MRO | Mars Reconnaissance Orbiter |
| MST | Multi-Sensor Triangulation |
| MY | Mars Year |
| NAIF | Navigation and Ancillary Information Facility |
| NGATE | Next Generation Automatic Terrain Extraction |
| PEDR | Precision Experiment Data Record |
| RDR | Reduced Data Record |
| RMS | Root Mean Square |
| RSS | Residual Sum of Squares |
| SOCET Set | Soft Copy Exploitation Tool Set |
| SPICE | Spacecraft Planet Instrument C-matrix Events |
| SPORC | Stereo Pair Orbits Restricted to a Cycle |
| TDI | Time Delay Integration |
| TIN | Triangulated Irregular Network |
Appendix A. Table of Software/Applications

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Software/Application | URL (If Applicable) |
|---|---|
| Ames Stereo Pipeline | https://doi.org/10.5281/zenodo.598174, accessed on 10 March 2022 |
| pc_align | stereopipeline.readthedocs.io/en/latest/tools/pc_align.html, accessed on 10 March 2022 |
| ISIS | https://doi.org/10.5281/zenodo.2563341, accessed on 10 March 2022 |
| hi2isis | |
| hical | |
| histitch | |
| noproj | |
| socetlinescankeywords | |
| SOCET Set v.5.6.0 | |
| dtm_compare | (SOCET Set internal command line program) |
| HiROC | |
| HiSEAS | (code maintained internally by HiROC) |
| autoTriangulation | https://www.uahirise.org/tools/at/, accessed on 10 March 2022 |
Appendix B. Table of Figure of Merit (FOM) Classes
| SOCET Set Values | FOM Map Color | Category Description |
|---|---|---|
| 1 | Black | No data, outside boundary |
| 2 | Dark blue | Shadow (if designated as such) |
| 3, 5–20, 28, 31–39 | Orange | Suspicious (edge, corner, did not correlate, |
| other bad value, derived from seed DTM) | ||
| 4, 30 | Red | Interpolated/extrapolated |
| (e.g., from neighbor pixels) | ||
| 21 | Pink | Saturated (in source images) |
| 22–27, 29 | Cyan | Manually edited/interpolated or smoothed |
| 40–59 | Yellow | Low end of good correlation range |
| 60–99 | Sea Green | Good correlation |
References
- Zurek, R.W.; Smrekar, S.E. An overview of the Mars Reconnaissance Orbiter (MRO) science mission. J. Geophys. Res. E Planets 2007, 112, 1–22. [Google Scholar] [CrossRef] [Green Version]
- Diniega, S.; Bramson, A.M.; Buratti, B.; Buhler, P.; Burr, D.M.; Chojnacki, M.; Conway, S.J.; Dundas, C.M.; Hansen, C.J.; McEwen, A.S.; et al. Modern Mars’ geomorphological activity, driven by wind, frost, and gravity. Geomorphology 2021, 380, 107627. [Google Scholar] [CrossRef]
- Dundas, C.M.; Becerra, P.; Byrne, S.; Chojnacki, M.; Daubar, I.J.; Diniega, S.; Hansen, C.J.; Herkenhoff, K.E.; Landis, M.E.; McEwen, A.S.; et al. Active Mars: A dynamic world. J. Geophys. Res. 2021, 126, e2021JE006876. [Google Scholar] [CrossRef]
- Bridges, N.; Bourke, M.; Geissler, P.; Banks, M.; Colon, C.; Diniega, S.; Golombek, M.; Hansen, C.; Mattson, S.; McEwen, A.; et al. Planet-wide sand motion on Mars. Geology 2012, 40, 31–34. [Google Scholar] [CrossRef]
- Bridges, N.T.; Ayoub, F.; Avouac, J.P.; Leprince, S.; Lucas, A.; Mattson, S. Earth-like sand fluxes on Mars. Nature 2012, 485, 339–342. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bridges, N.; Geissler, P.; Silvestro, S.; Banks, M. Bedform migration on Mars: Current results and future plans. Aeolian Res. 2013, 9, 133–151. [Google Scholar] [CrossRef]
- Vaz, D.A.; Silvestro, S. Mapping and characterization of small-scale aeolian structures on Mars: An example from the MSL landing site in Gale Crater. Icarus 2014, 230, 151–161. [Google Scholar] [CrossRef]
- Chojnacki, M.; Urso, A.; Fenton, L.K.; Michaels, T.I. Aeolian dune sediment flux heterogeneity in Meridiani Planum, Mars. Aeolian Res. 2017, 26, 73–88. [Google Scholar] [CrossRef] [Green Version]
- Russell, P.; Thomas, N.; Byrne, S.; Herkenhoff, K.; Fishbaugh, K.; Bridges, N.; Okubo, C.; Milazzo, M.; Daubar, I.; Hansen, C.; et al. Seasonally active frost-dust avalanches on a north polar scarp of Mars captured by HiRISE. Geophys. Res. Lett. 2008, 35. [Google Scholar] [CrossRef]
- Hansen, C.J.; Byrne, S.; Portyankina, G.; Bourke, M.; Dundas, C.; McEwen, A.; Mellon, M.; Pommerol, A.; Thomas, N. Observations of the northern seasonal polar cap on Mars: I. Spring sublimation activity and processes. Icarus 2013, 225, 881–897. [Google Scholar] [CrossRef]
- Fanara, L.; Gwinner, K.; Hauber, E.; Oberst, J. Present-day erosion rate of north polar scarps on Mars due to active mass wasting. Icarus 2020, 342, 113434. [Google Scholar] [CrossRef]
- Diniega, S.; Byrne, S.; Bridges, N.T.; Dundas, C.M.; McEwen, A.S. Seasonality of present-day Martian dune-gully activity. Geology 2010, 38, 1047–1050. [Google Scholar] [CrossRef] [Green Version]
- Dundas, C.M.; McEwen, A.S.; Diniega, S.; Byrne, S.; Martinez-Alonso, S. New and recent gully activity on Mars as seen by HiRISE. Geophys. Res. Lett. 2010, 37. [Google Scholar] [CrossRef] [Green Version]
- Kolb, K.J.; McEwen, A.S.; Pelletier, J.D. Investigating gully flow emplacement mechanisms using apex slopes. Icarus 2010, 208, 132–142. [Google Scholar] [CrossRef]
- Conway, S.J.; de Haas, T.; Harrison, T.N. Martian gullies: A comprehensive review of observations, mechanisms and insights from Earth analogues. Geol. Soc. Lond. Spec. Publ. 2019, 467, 7–66. [Google Scholar] [CrossRef] [Green Version]
- Dundas, C.M.; Byrne, S.; McEwen, A.S.; Mellon, M.T.; Kennedy, M.R.; Daubar, I.J.; Saper, L. HiRISE observations of new impact craters exposing Martian ground ice. J. Geophys. Res. Planets 2014, 119, 109–127. [Google Scholar] [CrossRef]
- Daubar, I.J.; Dundas, C.M.; Byrne, S.; Geissler, P.; Bart, G.D.; McEwen, A.S.; Russell, P.S.; Chojnacki, M.; Golombek, M.P. Changes in blast zone albedo patterns around new Martian impact craters. Icarus 2016, 267, 86–105. [Google Scholar] [CrossRef]
- Thomas, P.C.; James, P.B.; Calvin, W.M.; Haberle, R.; Malin, M.C. Residual south polar cap of Mars: Stratigraphy, history, and implications of recent changes. Icarus 2009, 203, 352–375. [Google Scholar] [CrossRef]
- Becerra, P.; Byrne, S.; Brown, A.J. Transient bright “halos” on the south polar residual cap of Mars: Implications for mass-balance. Icarus 2015, 251, 211–225. [Google Scholar] [CrossRef]
- Portyankina, G.; Hansen, C.J.; Aye, K.M. Present-day erosion of Martian polar terrain by the seasonal CO2 jets. Icarus 2017, 282, 93–103. [Google Scholar] [CrossRef]
- McEwen, A.S.; Ojha, L.; Dundas, C.M.; Mattson, S.S.; Byrne, S.; Wray, J.J.; Cull, S.C.; Murchie, S.L.; Thomas, N.; Gulick, V.C. Seasonal flows on warm Martian slopes. Science 2011, 333, 740–743. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ojha, L.; McEwen, A.; Dundas, C.; Byrne, S.; Mattson, S.; Wray, J.; Masse, M.; Schaefer, E. HiRISE observations of recurring slope lineae (RSL) during southern summer on Mars. Icarus 2014, 231, 365–376. [Google Scholar] [CrossRef]
- Kirk, R.L.; Howington-Kraus, E.; Rosiek, M.R.; Anderson, J.A.; Archinal, B.A.; Becker, K.J.; Cook, D.A.; Galuszka, D.M.; Geissler, P.E.; Hare, T.M.; et al. Ultrahigh resolution topographic mapping of Mars with MRO HiRISE stereo images: Meter-scale slopes of candidate Phoenix landing sites. J. Geophys. Res. 2008, 113, E00A24. [Google Scholar] [CrossRef]
- Kirk, R.; Howington-Kraus, E.; Rosiek, M. Build your own topographic model: A photogrammetry guest facility for planetary researchers. In Proceedings of the 40th Lunar and Planetary Science Conference, The Woodlands, TX, USA, 23–27 March 2009. Abstract #1414. [Google Scholar]
- Miller, S.B.; Walker, A.S. Further developments of Leica digital photogrammetric systems by Helava. In Proceedings of the ACSM ASPRS ANNUAL CONVENTION. American Soc Photogrammetry and Remote Sensing Amer Cong, New Orleans, LA, USA, 14–24 March 1993; Volume 3, p. 256. [Google Scholar]
- Miller, S.B.; Walker, A.S. Die Entwicklung der digitalen photogrammetrischen Systeme von Leica und Helava. Z. Photogramm. Fernerkund. 1995, 63, 4–16. [Google Scholar]
- BAE Systems. SOCET Set User’s Manual; Version 5.6.0; BAE Systems, Inc.: Falls Church, VA, USA, 2011. [Google Scholar]
- Sides, S.C.; Becker, T.L.; Becker, K.J.; Edmundson, K.L.; Backer, J.W.; Wilson, T.J.; Weller, L.A.; Humphrey, I.R.; Berry, K.L.; Shepherd, M.R.; et al. The USGS Integrated Software for Imagers and Spectrometers (ISIS 3) instrument support, new capabilites, and releases. In Proceedings of the 48th Lunar and Planetary Science Conference, Houston, TX, USA, 20–24 March 2017; Volume 48. Abstract #2739.. [Google Scholar]
- McEwen, A.S.; Eliason, E.M.; Bergstrom, J.W.; Bridges, N.T.; Hansen, C.J.; Delamere, W.A.; Grant, J.A.; Gulick, V.C.; Herkenhoff, K.E.; Keszthelyi, L.; et al. Mars Reconnaissance Orbiter’s High Resolution Imaging Science Experiment (HiRISE). J. Geophys. Res. 2007, 112, E05S02. [Google Scholar] [CrossRef] [Green Version]
- Dorn, D.A.; Meiers, W.; Burkepile, J.; Freymiller, E.D.; Delamere, A.W.; McEwen, A.S.; Maggs, P.; Pool, P.J.; Wallace, I. HiRISE focal plane for use on the Mars Reconnaissance Orbiter. In Focal Plane Arrays for Space Telescopes; Grycewicz, T.J., McCreight, C.R., Eds.; SPIE: Bellingham, WA, USA, 2004; Volume 5167, pp. 63–71. [Google Scholar] [CrossRef]
- Delamere, W.A.; Tornabene, L.L.; McEwen, A.S.; Becker, K.; Bergstrom, J.W.; Bridges, N.T.; Eliason, E.M.; Gallagher, D.; Herkenhoff, K.E.; Keszthelyi, L.; et al. Color imaging of Mars by the High Resolution Imaging Science Experiment (HiRISE). Icarus 2010, 205, 38–52. [Google Scholar] [CrossRef]
- McEwen, A. Future high-resolution orbital reconnaissance with MRO/HIRISE. In Proceedings of the 42nd COSPAR Scientific Assembly, Pasadena, CA, USA, 14–22 July 2018; Volume 42, p. B4-2. [Google Scholar]
- McEwen, A.; Banks, M.; Baugh, N.; Becker, K.; Boyd, A.; Bergstrom, J.; Beyer, R.; Bortolini, E.; Bridges, N.; Byrne, S.; et al. The High Resolution Imaging Science Experiment (HiRISE) during MRO’s primary science phase (PSP). Icarus 2010, 205, 2–37. [Google Scholar] [CrossRef]
- Becker, K.; Archinal, B.; Hare, T.; Kirk, R.; Howington-Kraus, E.; Robinson, M.; Rosiek, M. Criteria for automated identification of stereo image pairs. In Proceedings of the 46th Annual Lunar and Planetary Science Conference, The Woodlands, TX, USA, 16–20 March 2015. Abstract #2703. [Google Scholar]
- Smith, D.E.; Zuber, M.T.; Frey, H.V.; Garvin, J.B.; Head, J.W.; Muhleman, D.O.; Pettengill, G.H.; Phillips, R.J.; Solomon, S.C.; Zwally, H.J.; et al. Mars Orbiter Laser Altimeter: Experiment summary after the first year of global mapping of Mars. J. Geophys. Res. 2001, 106, 23689. [Google Scholar] [CrossRef]
- Eliason, E.; Castalia, B.; Mattson, S.; Heyd, R.; Becker, K.; Anderson, J.; Sides, S. Software Interface Specification for HiRISE Reduced Data Record Products, Version 1.3; Jet Propulsion Laboratory: Pasadena, CA, USA, 2012.
- Becker, K.J.; Milazzo, M.P.; Delamere, W.A.; Herkenhoff, K.E.; Eliason, E.M.; Russell, P.S.; Keszthelyi, L.P.; McEwen, A.S. hical—The HiRISE radiometric calibration software developed within the ISIS3 planetary image processing suite. In U.S. Geological Survey Techniques and Methods; Book 7; U.S. Department of the Interior: Reston, VA, USA, 2021; Chapter 27. [Google Scholar] [CrossRef]
- Sutton, S.S.; Boyd, A.K.; Kirk, R.L.; Cook, D.; Backer, J.W.; Fennema, A.; Heyd, R.; McEwen, A.S.; Mirchandani, S.D. Correcting spacecraft jitter in HiRISE images. In Planetary Remote Sensing and Mapping; Wu, B., Di, K., Oberst, J., Karachevtseva, I., Eds.; Taylor & Francis Group: London, UK, 2019; Chapter 8; pp. 91–106. [Google Scholar]
- McCleese, D.J.; Schofield, J.T.; Taylor, F.W.; Calcutt, S.B.; Foote, M.C.; Kass, D.M.; Leovy, C.B.; Paige, D.A.; Read, P.L.; Zurek, R.W. Mars Climate Sounder: An investigation of thermal and water vapor structure, dust and condensate distributions in the atmosphere, and energy balance of the polar regions. J. Geophys. Res. 2007, 112, E05S06. [Google Scholar] [CrossRef] [Green Version]
- Acton, C.H. Ancillary data services of NASA’s navigation and ancillary information facility. Planet. Space Sci. 1996, 44, 65–70. [Google Scholar] [CrossRef]
- Konopliv, A.S.; Asmar, S.W.; Folkner, W.M.; Karatekin, Ö.; Nunes, D.C.; Smrekar, S.E.; Yoder, C.F.; Zuber, M.T. Mars high resolution gravity fields from MRO, Mars seasonal gravity, and other dynamical parameters. Icarus 2011, 211, 401–428. [Google Scholar] [CrossRef]
- Konopliv, A.S.; Park, R.S.; Folkner, W.M. An improved JPL Mars gravity field and orientation from Mars orbiter and lander tracking data. Icarus 2016, 274, 253–260. [Google Scholar] [CrossRef]
- Menon, P.; Wagner, S.; Demcak, S.; Jefferson, D.; Graat, E.; Lee, K.; Schulze, W. 50,000 laps around Mars: Navigating the Mars Reconnaissance Orbiter through the extended missions (January 2009–March 2017). In International Symposium on Space Flight Dynamics; Jet Propulsion Laboratory, National Aeronautics and Space Administration: Pasadena, CA, USA, 2017. [Google Scholar]
- Zhang, B.; Miller, S.; Walker, S.; Devencia, K. Next Generation Automatic Terrain Extraction using Microsoft UltraCam imagery. In Proceedings of the ASPRS 2007 Annual Conference, Tampa, FL, USA, 7–11 May 2007. [Google Scholar]
- Zhang, B.; Miller, S.K.D.; Walker, S. Automatic terrain extraction using multiple image pair and back matching. In Proceedings of the ASPRS 2006 Annual Conference, Reno, NV, USA, 1–5 May 2006. [Google Scholar]
- Henriksen, M.; Manheim, M.; Burns, K.; Seymour, P.; Speyerer, E.; Deran, A.; Boyd, A.; Howington-Kraus, E.; Rosiek, M.; Archinal, B.; et al. Extracting accurate and precise topography from LROC narrow angle camera stereo observations. Icarus 2017, 283, 122–137. [Google Scholar] [CrossRef]
- Kirk, R.; Mayer, D.; Redding, B.L.; Galuszka, D.; Fergason, R.; Hare, T.; Gwinner, K. Further adventures in Mars DTM quality: Smoothing errors, sharpening details. Remote Sens. 2021, 43, 659–666. [Google Scholar] [CrossRef]
- Neumann, G.A.; Rowlands, D.D.; Lemoine, F.G.; Smith, D.E.; Zuber, M.T. Crossover analysis of Mars Orbiter Laser Altimeter data. J. Geophys. Res. E Planets 2001, 106, 23753–23768. [Google Scholar] [CrossRef] [Green Version]
- Kilgallon, A.; Stephens, J.; Sutton, S.; Mueting, J. AutoTriangulation: A new tool for controlling stereo pairs to laser altimetry. In Proceedings of the 46th Lunar and Planetary Science Conference, The Woodlands, TX, USA, 16–20 March 2015. Abstract #2373. [Google Scholar]
- Golombek, M.; Grant, J.; Kipp, D.; Vasavada, A.; Kirk, R.; Fergason, R.; Bellutta, P.; Calef, F.; Larsen, K.; Katayama, Y.; et al. Selection of the Mars Science Laboratory landing site. Space Sci. Rev. 2012, 170, 641–737. [Google Scholar] [CrossRef]
- Sutton, S.; Heyd, R.; Fennema, A.; Mcewen, A.S.; Kirk, R.L.; Howington-Kraus, E.; Espinoza, A. HiRISE digital terrain models: Updates and advances. In Proceedings of the Second Planetary Data Workshop, Flagstaff, AZ, USA, 8–11 June 2015. Abstract #7056. [Google Scholar]
- Sutton, S.S.; Chojnacki, M.; Kilgallon, A. Precision and accuracy of simultaneously collected HiRISE digital terrain models. In Proceedings of the 46th Lunar and Planetary Science Conference, The Woodlands, TX, USA, 16–20 March 2015. Abstract #3010. [Google Scholar]
- Kirk, R.L.; Howington-Kraus, E.; Redding, B.; Galuszka, D.; Hare, T.M.; Archinal, B.A.; Soderblom, L.A.; Barrett, J.M. High-resolution topomapping of candidate MER landing sites with Mars Orbiter Camera narrow-angle images. J. Geophys. Res. 2003, 108, 8088. [Google Scholar] [CrossRef]
- Cook, A.C.; Oberst, J.; Roatsch, T.; Jaumann, R.; Acton, C. Clementine imagery: Selenographic coverage for cartographic and scientific use. Planet. Space Sci. 1996, 44, 1135–1148. [Google Scholar] [CrossRef]
- Simioni, E.; Re, C.; Mudric, T.; Cremonese, G.; Tulyakov, S.; Petrella, A.; Pommerol, A.; Thomas, N. 3DPD: A photogrammetric pipeline for a PUSH frame stereo cameras. Planet. Space Sci. 2021, 198, 105165. [Google Scholar] [CrossRef]
- Heipke, C.; Oberst, J.; Albertz, J.; Attwenger, M.; Dorninger, P.; Dorrer, E.; Ewe, M.; Gehrke, S.; Gwinner, K.; Hirschmüller, H.; et al. Evaluating planetary digital terrain models–The HRSC DTM test. Planet. Space Sci. 2007, 55, 2173–2191. [Google Scholar] [CrossRef]
- Mattson, S.; Russell, P.; Byrne, S.; Kirk, R.L.; Herkenhoff, K.; McEwen, A.S. Production and error analysis of polar digital terrain models from HiRISE. In Proceedings of the 43rd Lunar and Planetary Science Conference, Pasadena, CA, USA, 14–22 July 2012. Abstract #2659. [Google Scholar]
- Schaefer, E.I.; McEwen, A.S.; Sutton, S.S. A case study of recurring slope lineae (RSL) at Tivat crater: Implications for RSL origins. Icarus 2019, 317, 621–648. [Google Scholar] [CrossRef]
- Dundas, C.M.; McEwen, A.S.; Chojnacki, M.; Milazzo, M.P.; Byrne, S.; McElwaine, J.N.; Urso, A. Granular flows at recurring slope lineae on Mars indicate a limited role for liquid water. Nat. Geosci. 2017, 10, 903–907. [Google Scholar] [CrossRef] [Green Version]
- Hansen, C.J.; Bourke, M.; Bridges, N.T.; Byrne, S.; Colon, C.; Diniega, S.; Dundas, C.; Herkenhoff, K.; McEwen, A.; Mellon, M.; et al. Seasonal erosion and restoration of Mars’ northern polar dunes. Science 2011, 331, 575–578. [Google Scholar] [CrossRef]
- Dundas, C.M.; Diniega, S.; Hansen, C.J.; Byrne, S.; McEwen, A.S. Seasonal activity and morphological changes in Martian gullies. Icarus 2012, 220, 124–143. [Google Scholar] [CrossRef]
- Dundas, C.M.; Mellon, M.T.; Conway, S.J.; Gastineau, R. Active boulder movement at high Martian latitudes. Geophys. Res. Lett. 2019, 46, 5075–5082. [Google Scholar] [CrossRef] [Green Version]
- Banks, M.E.; Fenton, L.K.; Bridges, N.T.; Geissler, P.E.; Chojnacki, M.; Runyon, K.D.; Silvestro, S.; Zimbelman, J.R. Patterns in mobility and modification of middle- and high-latitude southern hemisphere dunes on Mars. J. Geophys. Res. Planets 2018, 123, 3205–3219. [Google Scholar] [CrossRef] [Green Version]
- Dundas, C.M.; Bramson, A.M.; Ojha, L.; Wray, J.J.; Mellon, M.T.; Byrne, S.; McEwen, A.S.; Putzig, N.E.; Viola, D.; Sutton, S.; et al. Exposed subsurface ice sheets in the Martian mid-latitudes. Science 2018, 359, 199–201. [Google Scholar] [CrossRef] [Green Version]
- Chojnacki, M.; McEwen, A.; Dundas, C.; Ojha, L.; Urso, A.; Sutton, S. Geologic context of recurring slope lineae in Melas and Coprates Chasmata, Mars. J. Geophys. Res. Planets 2016, 121, 1204–1231. [Google Scholar] [CrossRef] [Green Version]
- McEwen, A.S.; Dundas, C.M.; Mattson, S.S.; Toigo, A.D.; Ojha, L.; Wray, J.J.; Chojnacki, M.; Byrne, S.; Murchie, S.L.; Thomas, N. Recurring slope lineae in equatorial regions of Mars. Nat. Geosci. 2013, 7, 53–58. [Google Scholar] [CrossRef]
- Stillman, D.E.; Michaels, T.I.; Grimm, R.E.; Hanley, J. Observations and modeling of northern mid-latitude recurring slope lineae (RSL) suggest recharge by a present-day Martian briny aquifer. Icarus 2016, 265, 125–138. [Google Scholar] [CrossRef]
- Stillman, D.E.; Michaels, T.I.; Grimm, R.E. Characteristics of the numerous and widespread recurring slope lineae (RSL) in Valles Marineris, Mars. Icarus 2017, 285, 195–210. [Google Scholar] [CrossRef]
- Stillman, D.E.; Grimm, R.E. Two pulses of seasonal activity in Martian southern mid-latitude recurring slope lineae (RSL). Icarus 2018, 302, 126–133. [Google Scholar] [CrossRef]
- McEwen, A.S.; Schaefer, E.I.; Dundas, C.M.; Sutton, S.S.; Tamppari, L.K.; Chojnacki, M. Mars: Abundant recurring slope lineae (RSL) following the planet-encircling dust event (PEDE) of 2018. J. Geophys. Res. Planets 2021, 126, e2020JE006575. [Google Scholar] [CrossRef]
- Millot, C.; Quantin-Nataf, C.; Leyrat, C.; Enjolras, M. Local topography effects on the surface temperatures on Mars—Application to the case of recurring slope lineae (RSL). Icarus 2021, 355, 114136. [Google Scholar] [CrossRef]
- Grimm, R.E.; Harrison, K.P.; Stillman, D.E.; Kirchoff, M.R. On the secular retention of ground water and ice on Mars. J. Geophys. Res. Planets 2017, 122, 94–109. [Google Scholar] [CrossRef]
- McEwen, A.S. Are recurring slope lineae habitable? In From Habitability to Life on Mars; Elsevier: Amsterdam, The Netherlands, 2018; pp. 249–274. [Google Scholar] [CrossRef]
- Grimm, R.E.; Harrison, K.P.; Stillman, D.E. Water budgets of Martian recurring slope lineae. Icarus 2014, 233, 316–327. [Google Scholar] [CrossRef]
- Levy, J. Hydrological characteristics of recurrent slope lineae on Mars: Evidence for liquid flow through regolith and comparisons with Antarctic terrestrial analogs. Icarus 2012, 219, 1–4. [Google Scholar] [CrossRef]
- Stillman, D.E.; Michaels, T.I.; Grimm, R.E.; Harrison, K.P. New observations of Martian southern mid-latitude recurring slope lineae (RSL) imply formation by freshwater subsurface flows. Icarus 2014, 233, 328–341. [Google Scholar] [CrossRef]
- Stillman, D.E.; Bue, B.D.; Wagstaff, K.L.; Primm, K.M.; Michaels, T.I.; Grimm, R.E. Evaluation of wet and dry recurring slope lineae (RSL) formation mechanisms based on quantitative mapping of RSL in Garni Crater, Valles Marineris, Mars. Icarus 2020, 335, 113420. [Google Scholar] [CrossRef]
- Tebolt, M.; Levy, J.; Goudge, T.; Schorghofer, N. Slope, elevation, and thermal inertia trends of Martian recurring slope lineae initiation and termination points: Multiple possible processes occurring on coarse, sandy slopes. Icarus 2020, 338, 113536. [Google Scholar] [CrossRef]
- Dundas, C.M. An aeolian grainflow model for Martian recurring slope lineae. Icarus 2020, 343, 113681. [Google Scholar] [CrossRef] [PubMed]
- Schmidt, F.; Andrieu, F.; Costard, F.; Kocifaj, M.; Meresescu, A.G. Formation of recurring slope lineae on Mars by rarefied gas-triggered granular flows. Nat. Geosci. 2017, 10, 270–273. [Google Scholar] [CrossRef]
- Ojha, L.; Chojnacki, M.; McDonald, G.D.; Shumway, A.; Wolff, M.J.; Smith, M.D.; McEwen, A.S.; Ferrier, K.; Huber, C.; Wray, J.J.; et al. Seasonal slumps in Juventae Chasma, Mars. J. Geophys. Res. Planets 2017, 122, 2193–2214. [Google Scholar] [CrossRef] [Green Version]
- Leprince, S.; Barbot, S.; Ayoub, F.; Avouac, J.P. Automatic and precise orthorectification, coregistration, and subpixel correlation of satellite images, application to ground deformation measurements. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1529–1558. [Google Scholar] [CrossRef] [Green Version]
- Ayoub, F.; Avouac, J.P.; Newman, C.E.; Richardson, M.I.; Lucas, A.; Leprince, S.; Bridges, N.T. Threshold for sand mobility on Mars calibrated from seasonal variations of sand flux. Nat. Commun. 2014, 5, 1–8. [Google Scholar] [CrossRef] [Green Version]
- Roback, K.P.; Runyon, K.; Newman, C.; Avouac, J.P. Multi-year measurements of ripple and dune migration on Mars: Implications for the wind regime and sand transport. Icarus 2022, 380, 114966. [Google Scholar] [CrossRef]
- Chojnacki, M.; Vaz, D.A.; Silvestro, S.; Silva, D.C.A. Widespread megaripple activity across the north polar ergs of Mars. J. Geophys. Res. Planets 2021, 126, 1–19. [Google Scholar] [CrossRef]
- Bridges, N.T.; Sullivan, R.; Newman, C.E.; Navarro, S.; van Beek, J.; Ewing, R.C.; Ayoub, F.; Silvestro, S.; Gasnault, O.; Le Mouélic, S.; et al. Martian aeolian activity at the Bagnold Dunes, Gale Crater: The view from the surface and orbit. J. Geophys. Res. Planets 2017, 122, 2077–2110. [Google Scholar] [CrossRef]
- Chojnacki, M.; Johnson, J.R.; Moersch, J.E.; Fenton, L.K.; Michaels, T.I.; Bell, J.F. Persistent aeolian activity at Endeavour crater, Meridiani Planum, Mars: New observations from orbit and the surface. Icarus 2015, 251, 275–290. [Google Scholar] [CrossRef]
- Chojnacki, M.; Banks, M.; Urso, A. Wind-driven erosion and exposure potential at Mars 2020 rover candidate-landing Sites. J. Geophys. Res. Planets 2018, 123, 468–488. [Google Scholar] [CrossRef]
- Chojnacki, M.; Banks, M.E.; Fenton, L.K.; Urso, A.C. Boundary condition controls on the high-sand-flux regions of Mars. Geology 2019, 47, 427–430. [Google Scholar] [CrossRef]
- Runyon, K.; Bridges, N.; Ayoub, F.; Newman, C.; Quade, J. An integrated model for dune morphology and sand fluxes on Mars. Earth Planet. Sci. Lett. 2017, 457, 204–212. [Google Scholar] [CrossRef]
- Silvestro, S.; Chojnacki, M.; Vaz, D.A.; Cardinale, M.; Yizhaq, H.; Esposito, F. Megaripple migration on Mars. J. Geophys. Res. Planets 2020, 125. [Google Scholar] [CrossRef]
- Golombek, M.; Robinson, K.; McEwen, A.; Bridges, N.; Ivanov, B.; Tornabene, L.; Sullivan, R. Constraints on ripple migration at Meridiani Planum from Opportunity and HiRISE observations of fresh craters. J. Geophys. Res. Planets 2010, 115, E00F08. [Google Scholar] [CrossRef] [Green Version]
- Balme, M.; Berman, D.C.; Bourke, M.C.; Zimbelman, J.R. Transverse aeolian ridges (TARs) on Mars. Geomorphology 2008, 101, 703–720. [Google Scholar] [CrossRef] [Green Version]
- Berman, D.C.; Balme, M.R.; Rafkin, S.C.; Zimbelman, J.R. Transverse aeolian ridges (TARs) on Mars II: Distributions, orientations, and ages. Icarus 2011, 213, 116–130. [Google Scholar] [CrossRef]
- Berman, D.C.; Balme, M.R.; Michalski, J.R.; Clark, S.C.; Joseph, E.C.S. High-resolution investigations of transverse aeolian ridges on Mars. Icarus 2018, 312, 247–266. [Google Scholar] [CrossRef] [Green Version]
- Piqueux, S.; Byrne, S.; Richardson, M.I. Sublimation of Mars’s southern seasonal CO2 ice cap and the formation of spiders. J. Geophys. Res. Planets 2003, 108. [Google Scholar] [CrossRef] [Green Version]
- Kieffer, H.H. Cold jets in the Martian polar caps. J. Geophys. Res. Planets 2007, 112. [Google Scholar] [CrossRef] [Green Version]
- Portyankina, G.; Markiewicz, W.J.; Thomas, N.; Hansen, C.J.; Milazzo, M. HiRISE observations of gas sublimation-driven activity in Mars’ southern polar regions: III. Models of processes involving translucent ice. Icarus 2010, 205, 311–320. [Google Scholar] [CrossRef]
- Piqueux, S.; Byrne, S.; Kieffer, H.H.; Titus, T.N.; Hansen, C.J. Enumeration of Mars years and seasons since the beginning of telescopic exploration. Icarus 2015, 251, 332–338. [Google Scholar] [CrossRef]
- Ingersoll, A.P.; Svitek, T.; Murray, B.C. Stability of polar frosts in spherical bowl-shaped craters on the Moon, Mercury, and Mars. Icarus 1992, 100, 40–47. [Google Scholar] [CrossRef]
- Smith, I.B.; Hayne, P.O.; Byrne, S.; Becerra, P.; Kahre, M.; Calvin, W.; Hvidberg, C.; Milkovich, S.; Buhler, P.; Landis, M.; et al. The Holy Grail: A road map for unlocking the climate record stored within Mars’ polar layered deposits. Planet. Space Sci. 2020, 184, 104841. [Google Scholar] [CrossRef] [Green Version]
- Banks, M.E.; Byrne, S.; Galla, K.; McEwen, A.S.; Bray, V.J.; Dundas, C.M.; Fishbaugh, K.E.; Herkenhoff, K.E.; Murray, B.C. Crater population and resurfacing of the Martian north polar layered deposits. J. Geophys. Res. E Planets 2010, 115, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Landis, M.; Byrne, S.; Daubar, I.; Herkenhoff, K.; Dundas, C. Surface age and resurfacing Rates of the north polar layered deposits, Mars. In Proceedings of the Sixth International Conference on Mars Polar Science and Exploration, Reykjavik, Iceland, 5–9 September 2016; Volume 1926. LPI Contributions Abstract #6013.. [Google Scholar]
- Landis, M.; Byrne, S.; Hayne, P.; Piqueux, S.; Wilcoski, A. Interannual variability of ice within north polar layered deposits craters on Mars. In Proceedings of the 52nd Lunar and Planetary Science Conference, The Woodlands, TX, USA, 15–19 March 2021. Abstract #1653. [Google Scholar]
- Malin, M.C.; Edgett, K.S. Evidence for recent groundwater seepage and surface runoff on Mars. Science 2000, 288, 2330–2335. [Google Scholar] [CrossRef] [Green Version]
- Costard, F.; Forget, F.; Mangold, N.; Peulvast, J.P. Formation of recent Martian debris flows by melting of near-surface ground ice at high obliquity. Science 2002, 295, 110–113. [Google Scholar] [CrossRef] [Green Version]
- Malin, M.C.; Danielson, G.E.; Ingersoll, A.P.; Masursky, H.; Veverka, J.; Ravine, M.A.; Soulanille, T.A. Mars Observer camera. J. Geophys. Res. Planets 1992, 97, 7699–7718. [Google Scholar] [CrossRef]
- Malin, M.C.; Bell, J.F.; Cantor, B.A.; Caplinger, M.A.; Calvin, W.M.; Clancy, R.T.; Edgett, K.S.; Edwards, L.; Haberle, R.M.; James, P.B.; et al. Context Camera Investigation on board the Mars Reconnaissance Orbiter. J. Geophys. Res. 2007, 112, E05S04. [Google Scholar] [CrossRef] [Green Version]
- Diniega, S.; Hansen, C.; McElwaine, J.; Hugenholtz, C.; Dundas, C.; McEwen, A.; Bourke, M. A new dry hypothesis for the formation of Martian linear gullies. Icarus 2013, 225, 526–537. [Google Scholar] [CrossRef]
- Pasquon, K.; Gargani, J.; Massé, M.; Vincendon, M.; Conway, S.J.; Séjourné, A.; Jomelli, V.; Balme, M.R.; Lopez, S.; Guimpier, A. Present-day development of gully-channel sinuosity by carbon dioxide gas supported flows on Mars. Icarus 2019, 329, 296–313. [Google Scholar] [CrossRef]
- Raack, J.; Reiss, D.; Appéré, T.; Vincendon, M.; Ruesch, O.; Hiesinger, H. Present-day seasonal gully activity in a south polar pit (Sisyphi Cavi) on Mars. Icarus 2015, 251, 226–243. [Google Scholar] [CrossRef]
- Raack, J.; Conway, S.J.; Heyer, T.; Bickel, V.T.; Philippe, M.; Hiesinger, H.; Johnsson, A.; Mass, M. Present-day gully activity in Sisyphi Cavi, Mars—Flow-like features and block movements. Icarus 2020, 350, 113899. [Google Scholar] [CrossRef]
- Malin, M.; Edgett, K.; Posiolova, L.; Mccolley, S.; Noe Dobrea, E. Present-day impact cratering rate and contemporary gully activity on Mars. Science 2006, 314, 1573–1577. [Google Scholar] [CrossRef]
- Pelletier, J.D.; Kolb, K.J.; McEwen, A.S.; Kirk, R.L. Recent bright gully deposits on Mars: Wet or dry flow? Geology 2008, 36, 211–214. [Google Scholar] [CrossRef]
- De Haas, T.; McArdell, B.W.; Conway, S.J.; McElwaine, J.N.; Kleinhans, M.G.; Salese, F.; Grindrod, P.M. Initiation and flow conditions of contemporary flows in Martian gullies. J. Geophys. Res. Planets 2019, 124, 2246–2271. [Google Scholar] [CrossRef] [Green Version]
- Conway, S.J.; Balme, M.R.; Murray, J.B.; Towner, M.C.; Okubo, C.H.; Grindrod, P.M. The indication of Martian gully formation processes by slope—Area analysis. Geol. Soc. Lond. Spec. Publ. 2011, 356, 171–201. [Google Scholar] [CrossRef] [Green Version]
- Conway, S.J.; Balme, M.R. A novel topographic parameterization scheme indicates that Martian gullies display the signature of liquid water. Earth Planet. Sci. Lett. 2016, 454, 36–45. [Google Scholar] [CrossRef] [Green Version]
- De Haas, T.; Conway, S.J.; Butcher, F.E.G.; Levy, J.; Grindrod, P.M.; Goudge, T.A.; Balme, M.R. Time will tell: Temporal evolution of Martian gullies and palaeoclimatic implications. Geol. Soc. Lond. Spec. Publ. 2019, 467, 165–186. [Google Scholar] [CrossRef]
- Dundas, C.M.; Diniega, S.; McEwen, A.S. Long-term monitoring of Martian gully formation and evolution with MRO/HiRISE. Icarus 2015, 251, 244–263. [Google Scholar] [CrossRef]
- Reiss, D.; Van Gasselt, S.; Neukum, G.; Jaumann, R. Absolute dune ages and implications for the time of formation of gullies in Nirgal Vallis, Mars. J. Geophys. Res. Planets 2004, 109, E06007. [Google Scholar] [CrossRef] [Green Version]
- Schon, S.C.; Head, J.W.; Fassett, C.I. Unique chronostratigraphic marker in depositional fan stratigraphy on Mars: Evidence for ca. 1.25 Ma gully activity and surficial meltwater origin. Geology 2009, 37, 207–210. [Google Scholar] [CrossRef]
- Sylvest, M.E.; Dixon, J.C.; Conway, S.J.; Patel, M.R.; McElwaine, J.N.; Hagermann, A.; Barnes, A. CO2 sublimation in Martian gullies: Laboratory experiments at varied slope angle and regolith grain sizes. Geol. Soc. Lond. Spec. Publ. 2019, 467, 343–371. [Google Scholar] [CrossRef]
- Head, J.W.; Neukum, G.; Jaumann, R.; Hiesinger, H.; Hauber, E.; Carr, M.; Masson, P.; Foing, B.; Hoffmann, H.; Kreslavsky, M.; et al. Tropical to mid-latitude snow and ice accumulation, flow and glaciation on Mars. Nature 2005, 434, 346–351. [Google Scholar] [CrossRef]
- Sori, M.M.; Byrne, S.; Hamilton, C.W.; Landis, M.E. Viscous flow rates of icy topography on the north polar layered deposits of Mars. Geophys. Res. Lett. 2016, 43, 541–549. [Google Scholar] [CrossRef] [Green Version]
- Sori, M.M.; Byrne, S.; Bramson, A.M. Present-day flow rates of mid-latitude glaciers on Mars. Eur. Planet. Sci. Congr. 2017, 11, 1–2, Abstract #382. [Google Scholar]
- Thomas, M.F.; McEwen, A.S.; Dundas, C.M. Present-day mass wasting in sulfate-rich sediments in the equatorial regions of Mars. Icarus 2020, 342, 113566. [Google Scholar] [CrossRef]
- Roberts, G.P.; Matthews, B.; Bristow, C.; Guerrieri, L.; Vetterlein, J. Possible evidence of paleomarsquakes from fallen boulder populations, Cerberus Fossae, Mars. J. Geophys. Res. Planets 2012, 117, E02009. [Google Scholar] [CrossRef] [Green Version]
- Grindrod, P.M.; Hollingsworth, J.; Ayoub, F.; Hunt, S.A. The search for active Marsquakes using subpixel coregistration and correlation: Best practice and first results. J. Geophys. Res. Planets 2018, 123, 1881–1900. [Google Scholar] [CrossRef]
- Murchie, S.; Arvidson, R.; Bedini, P.; Beisser, K.; Bibring, J.P.; Bishop, J.; Boldt, J.; Cavender, P.; Choo, T.; Clancy, R.T.; et al. Compact Reconnaissance Imaging Spectrometer for Mars (CRISM) on Mars Reconnaissance Orbiter (MRO). J. Geophys. Res. 2007, 112, E05S03. [Google Scholar] [CrossRef]
- Wray, J.J.; Ehlmann, B.L.; Squyres, S.W.; Mustard, J.F.; Kirk, R.L. Compositional stratigraphy of clay-bearing layered deposits at Mawrth Vallis, Mars. Geophys. Res. Lett. 2008, 35, L12202. [Google Scholar] [CrossRef] [Green Version]
- Wray, J.J.; Milliken, R.E.; Dundas, C.M.; Swayze, G.A.; Andrews-Hanna, J.C.; Baldridge, A.M.; Chojnacki, M.; Bishop, J.L.; Ehlmann, B.L.; Murchie, S.L.; et al. Columbus crater and other possible groundwater-fed paleolakes of Terra Sirenum, Mars. J. Geophys. Res. E Planets 2011, 116, 1–41. [Google Scholar] [CrossRef] [Green Version]
- Weitz, C.M.; Milliken, R.E.; Grant, J.A.; McEwen, A.S.; Williams, R.M.E.; Bishop, J.L.; Thomson, B.J. Mars Reconnaissance Orbiter observations of light-toned layered deposits and associated fluvial landforms on the plateaus adjacent to Valles Marineris. Icarus 2010, 205, 73–102. [Google Scholar] [CrossRef]
- Weitz, C.M.; Bishop, J.L.; Thollot, P.; Mangold, N.; Roach, L.H. Diverse mineralogies in two troughs of Noctis Labyrinthus, Mars. Geology 2011, 39, 899–902. [Google Scholar] [CrossRef]
- Weitz, C.M.; Noe Dobrea, E.Z.; Lane, M.D.; Knudson, A.T. Geologic relationships between gray hematite, sulfates, and clays in Capri Chasma. J. Geophys. Res. Planets 2012, 117, E00J09. [Google Scholar] [CrossRef]
- Okubo, C.H. Structural geology of Amazonian-aged layered sedimentary deposits in southwest Candor Chasma, Mars. Icarus 2010, 207, 210–225. [Google Scholar] [CrossRef]
- Tirsch, D.; Bishop, J.L.; Voigt, J.R.C.; Tornabene, L.L.; Erkeling, G.; Jaumann, R. Geology of central Libya Montes, Mars: Aqueous alteration history from mineralogical and morphological mapping. Icarus 2018, 314, 12–34. [Google Scholar] [CrossRef] [Green Version]
- Tornabene, L.L.; Seelos, F.P.; Pommerol, A.; Thomas, N.; Caudill, C.M.; Becerra, P.; Bridges, J.C.; Byrne, S.; Cardinale, M.; Chojnacki, M.; et al. Image simulation and assessment of the colour and spatial capabilities of the Colour and Stereo Surface Imaging System (CaSSIS) on the ExoMars Trace Gas Orbiter. Space Sci. Rev. 2018, 214, 1–61. [Google Scholar] [CrossRef]
- Bishop, J.L.; Gross, C.; Danielsen, J.; Parente, M.; Murchie, S.L.; Horgan, B.; Wray, J.J.; Viviano, C.; Seelos, F.P. Multiple mineral horizons in layered outcrops at Mawrth Vallis, Mars, signify changing geochemical environments on early Mars. Icarus 2020, 341, 113634. [Google Scholar] [CrossRef]
- Seu, R.; Phillips, R.J.; Biccari, D.; Orosei, R.; Masdea, A.; Picardi, G.; Safaeinili, A.; Campbell, B.A.; Plaut, J.J.; Marinangeli, L.; et al. SHARAD sounding radar on the Mars Reconnaissance Orbiter. J. Geophys. Res. E Planets 2007, 112, 1–18. [Google Scholar] [CrossRef]
- Christian, S.; Holt, J.W.; Byrne, S.; Fishbaugh, K.E. Integrating radar stratigraphy with high resolution visible stratigraphy of the north polar layered deposits, Mars. Icarus 2013, 226, 1241–1251. [Google Scholar] [CrossRef]
- Becerra, P.; Byrne, S.; Sori, M.M.; Sutton, S.; Herkenhoff, K.E. Stratigraphy of the north polar layered deposits of Mars from high-resolution topography. J. Geophys. Res. Planets 2016, 121, 1445–1471. [Google Scholar] [CrossRef] [Green Version]
- Becerra, P.; Sori, M.M.; Byrne, S. Signals of astronomical climate forcing in the exposure topography of the north polar layered deposits of Mars. Geophys. Res. Lett. 2017, 44, 62–70. [Google Scholar] [CrossRef] [Green Version]
- Becerra, P.; Nunes, D.; Smith, I.B.; Sori, M.M.; Thomas, N. Two views of the Martian north polar layered deposits: Toward a correlation of radar and visible stratigraphic records. In Proceedings of the Seventh International Conference on Mars Polar Science and Exploration, Ushuaia, Argentina, 13–17 January 2020; Volume 2099. Abstract #6055. [Google Scholar]
- Bramson, A.M.; Byrne, S.; Putzig, N.E.; Sutton, S.; Plaut, J.J.; Brothers, T.C.; Holt, J.W. Widespread excess ice in Arcadia Planitia, Mars. Geophys. Res. Lett. 2015, 42, 6566–6574. [Google Scholar] [CrossRef] [Green Version]
- Fernando, J.; Schmidt, F.; Pilorget, C.; Pinet, P.; Ceamanos, X.; Douté, S.; Daydou, Y.; Costard, F. Characterization and mapping of surface physical properties of Mars from CRISM multi-angular data: Application to Gusev Crater and Meridiani Planum. Icarus 2015, 253, 271–295. [Google Scholar] [CrossRef] [Green Version]
- Thomas, N.; Cremonese, G.; Ziethe, R.; Gerber, M.; Brändli, M.; Bruno, G.; Erismann, M.; Gambicorti, L.; Gerber, T.; Ghose, K.; et al. The Colour and Stereo Surface Imaging System (CaSSIS) for the ExoMars Trace Gas Orbiter. Space Sci. Rev. 2017, 212, 1897–1944. [Google Scholar] [CrossRef] [Green Version]
- Vago, J.; Witasse, O.; Svedhem, H.; Baglioni, P.; Haldemann, A.; Gianfiglio, G.; Blancquaert, T.; McCoy, D.; de Groot, R. ESA ExoMars program: The next step in exploring Mars. Sol. Syst. Res. 2015, 49, 518–528. [Google Scholar] [CrossRef]
- Munaretto, G.; Pajola, M.; Lucchetti, A.; Re, C.; Cremonese, G.; Simioni, E.; Cambianica, P.; Thomas, N. Topographic correction of HiRISE and CaSSIS images: Validation and application to color observations of Martian albedo features. Planet. Space Sci. 2021, 200, 105198. [Google Scholar] [CrossRef]
- Munaretto, G.; Pajola, M.; Cremonese, G.; Re, C.; Lucchetti, A.; Simioni, E.; McEwen, A.S.; Pommerol, A.; Becerra, P.; Conway, S.J.; et al. Implications for the origin and evolution of Martian recurring slope lineae at Hale crater from CaSSIS observations. Planet. Space Sci. 2020, 187, 104947. [Google Scholar] [CrossRef]
- Becerra, P.; Sori, M.M.; Thomas, N.; Pommerol, A.; Simioni, E.; Sutton, S.S.; Tulyakov, S.; Cremonese, G. Timescales of the climate record in the south polar ice cap of Mars. Geophys. Res. Lett. 2019, 46, 7268–7277. [Google Scholar] [CrossRef] [Green Version]
- Re, C.; Tulyakov, S.; Simioni, E.; Mudric, T.; Cremonese, G.; Thomas, N. Performance evaluation of 3DPD, the photogrammetric pipeline for the CaSSIS stereo images. Int. Arch. Photogramm. Remote. Sens. Spat. Inf. Sci. 2019, XLII-2/W13, 1443–1449. [Google Scholar] [CrossRef] [Green Version]
- Golombek, M.; Huertas, A.; Kipp, D.; Calef, F. Detection and characterization of rocks and rock size-frequency distributions at the final four Mars Science Laboratory landing sites. Mars 2012, 7, 1–22. [Google Scholar] [CrossRef]
- Fergason, R.L.; Kirk, R.L.; Cushing, G.; Galuszka, D.M.; Golombek, M.P.; Hare, T.M.; Howington-Kraus, E.; Kipp, D.M.; Redding, B.L. Analysis of local slopes at the InSight landing site on Mars. Space Sci. Rev. 2017, 211, 109–133. [Google Scholar] [CrossRef]
- Golombek, M.; Kipp, D.; Warner, N.; Daubar, I.J.; Fergason, R.; Kirk, R.L.; Beyer, R.; Huertas, A.; Piqueux, S.; Putzig, N.E.; et al. Selection of the InSight landing site. Space Sci. Rev. 2017, 211, 5–95. [Google Scholar] [CrossRef]
- Golombek, M.P.; Huertas, A.; Marlow, J.; McGrane, B.; Klein, C.; Martinez, M.; Arvidson, R.E.; Heet, T.; Barry, L.; Seelos, K.; et al. Size-frequency distributions of rocks on the northern plains of Mars with special reference to Phoenix landing surfaces. J. Geophys. Res. 2008, 113, E00A09. [Google Scholar] [CrossRef] [Green Version]
- Fergason, R.L.; Hare, T.M.; Mayer, D.P.; Galuszka, D.M.; Redding, B.L.; Cheng, Y.; Otero, R.E. Mars 2020 terrain telative navigation support: Digital terrain model generation and mosaicking process improvement. In Proceedings of the 4th Planetary Data Workshop, Flagstaff, AZ, USA, 18–20 June 2019. Abstract #7047. [Google Scholar] [CrossRef]
- Fergason, R.; Hare, T.; Mayer, D.; Galuszka, D.; Redding, B.; Smith, E.; Shinaman, J.; Cheng, Y.; Otero, R. Mars 2020 terrain relative navigation flight product generation: Digital terrain model and orthorectified image mosaic. In Proceedings of the 51st Annual Lunar and Planetary Science Conference, The Woodlands, TX, USA, 16–20 March 2020. Abstract #2020. [Google Scholar]
- Cheng, Y.; Ansar, A.; Johnson, A. Making an onboard reference map From MRO/CTX imagery for Mars 2020 lander vision system. Earth Space Sci. 2021, 8, e2020EA001560. [Google Scholar] [CrossRef]
- Beyer, R.A.; Alexandrov, O.; McMichael, S. The Ames Stereo Pipeline: NASA’s open source software for deriving and processing terrain data. Earth Space Sci. 2018, 5, 537–548. [Google Scholar] [CrossRef]
- Wulder, M.A.; White, J.C.; Goward, S.N.; Masek, J.G.; Irons, J.R.; Herold, M.; Cohen, W.B.; Loveland, T.R.; Woodcock, C.E. Landsat continuity: Issues and opportunities for land cover monitoring. Remote Sens. Environ. 2008, 112, 955–969. [Google Scholar] [CrossRef]
- Diniega, S.; Kreslavsky, M.; Radebaugh, J.; Silvestro, S.; Telfer, M.; Tirsch, D. Our evolving understanding of aeolian bedforms, based on observation of dunes on different worlds. Aeolian Res. 2017, 26, 5–27. [Google Scholar] [CrossRef]


















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sutton, S.S.; Chojnacki, M.; McEwen, A.S.; Kirk, R.L.; Dundas, C.M.; Schaefer, E.I.; Conway, S.J.; Diniega, S.; Portyankina, G.; Landis, M.E.; et al. Revealing Active Mars with HiRISE Digital Terrain Models. Remote Sens. 2022, 14, 2403. https://doi.org/10.3390/rs14102403
Sutton SS, Chojnacki M, McEwen AS, Kirk RL, Dundas CM, Schaefer EI, Conway SJ, Diniega S, Portyankina G, Landis ME, et al. Revealing Active Mars with HiRISE Digital Terrain Models. Remote Sensing. 2022; 14(10):2403. https://doi.org/10.3390/rs14102403
Chicago/Turabian StyleSutton, Sarah S., Matthew Chojnacki, Alfred S. McEwen, Randolph L. Kirk, Colin M. Dundas, Ethan I. Schaefer, Susan J. Conway, Serina Diniega, Ganna Portyankina, Margaret E. Landis, and et al. 2022. "Revealing Active Mars with HiRISE Digital Terrain Models" Remote Sensing 14, no. 10: 2403. https://doi.org/10.3390/rs14102403